
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
481 - 500 / 843
移動体測位装置
【課題】衛星毎に異なる誤差を適切に反映させた重み付け測位演算を行うこと。
【解決手段】本発明による移動体用測位装置は、移動体の停止中に取得される前記位相の観測値を用いて、移動体の停止中における衛星と移動体の間の擬似距離を、衛星毎に計測する擬似距離計測手段と、移動体の停止中における複数の時点で前記擬似距離計測手段により計測された擬似距離に基づいて、該計測された擬似距離の誤差を表わす指標値を、衛星毎に算出する誤差指標値算出手段と、前記誤差指標値算出手段により算出された衛星毎の誤差指標値に基づいて、衛星毎の重み付け係数を決定する重み係数決定手段と、移動体の移動中に取得される前記位相の観測値を用いて、前記重み係数決定手段により決定された衛星毎の重み付け係数を用いた重み付け測位演算により、移動中の移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
携帯型情報端末及び携帯型情報端末の制御方法

【課題】出力された現在位置の信頼度を確認することができる携帯型情報端末を提供する
。
【解決手段】位置情報衛星から位置情報信号を受信して第1の現在位置を演算する第1の
現在位置演算部(ステップS42)と、移動距離及び移動方位を検出して第2の現在位置
を演算する第2の現在位置演算部(ステップS46)と、第1の現在位置演算部で第1の
現在位置を演算可能であるか否かを判断し、演算可能であるときに第1の現在位置演算部
を選択し、演算可能でないときに第2の現在位置演算部を選択する演算部選択手段(ステ
ップS43)と、該演算部選択手段で第2の現在位置演算部を選択したときに、第2の現
在位置の誤差推定量を演算する誤差推定量演算部(ステップS47〜S50)と、演算部
選択手段で第2の現在位置演算部を選択したときに、第2の現在位置と誤差推定量とを出
力する現在位置出力部(ステップS51,S46)とを備えている。
(もっと読む)
変位計測装置
【課題】低コストで、かつ高精度を実現することができる変位計測装置を得る。
【解決手段】変位計測点に設置された発信機1と、位置が既知である固定点に設置され、前記発信機1からの電波を受信する複数の受信アンテナ2と、前記複数の受信アンテナ2を切り替えるスイッチ3と、前記スイッチ3で選択された信号が入力される信号処理装置14とを設け、前記信号処理装置14は、前記スイッチ3で選択された、所定の組み合わせの受信アンテナ2で受信した信号間の位相差を計算して記憶し、次に前記スイッチ3を切り替えて別の組み合わせの受信アンテナ2で受信した信号間の位相差を計算して記憶し、これを繰り返すことにより得られた多数の受信アンテナの組み合せでの位相差を用いて、前記発信機1の位置を計算する。
(もっと読む)
クライアントシステム、ネットワークシステム及び測位方法
【課題】 ノンプリアンブルフレーム同期
【解決手段】 ナビゲーション衛星受信機は、ネットワークでアクセス可能な基準局を利用してパターンマッチング用のナビゲーションデータサブフレームをネットワーククライアントで保持する。もしくは、バイトあたりの通信コストが高価な場合にはサーバがパターンマッチングを実行する。保持されたナビゲーションデータには30秒置きに軌道暦情報が、そして12.5分置きに完全な衛星暦情報が繰り返されている。これにより、クライアントは受信したデータがナビゲーションデータシーケンスの中のどこにあるか即時に認識することができるので、TLMワードのプリアンブルを待たなくていい。従って、初期定点化時間を高速にする際、貴重な数秒の節約になる。
(もっと読む)
測位システム、測定装置、および測定方法
【課題】コストの削減を図りつつ、移動端末から送信された電波の受信時刻を高い時間分解能で測定すること。
【解決手段】スイッチ101は、切替制御部106の制御に従ってアンテナANT#1〜#4を切り替えながら、いずれかのアンテナによって受信されたパルス波を含む信号を検波部102へ出力する。検波部102は、スイッチ101から出力された信号を検波し、信号に含まれるパルス波を順次受信時刻測定部105へ出力する。受信時刻測定部105は、検波部102から出力されるパルス波の受信時刻を測定し、測定結果を測定結果保持部107へ出力する。切替制御部106は、1本目のアンテナにおいて受信されたパルス波の受信時刻測定後、測距パルスのパターンからアンテナを切り替える切替タイミングを決定し、切替タイミングにおいてアンテナを切り替えるようにスイッチ101を制御する。
(もっと読む)
エフェメリスを延長するための予測値更新方法
【課題】 GNSS受信機及びシステムにおいて、エフェメリスデータを使用するためのシステム、方法及び装置を提供する。
【解決手段】 悪い受信状態の下で、より長い間エフェメリスを使用可能とするために合成エフェメリスデータを使用する受信機を、劣化した合成エフェメリス情報に対して正確な情報を移入することが可能な様々な手法を用いて更新するものである。
(もっと読む)
自律移動支援システム及びその制御方法
【課題】自律移動支援システムの基地局の情報設定の作業効率を向上させる。
【解決手段】サーバ装置100は、標定信号を用いた携帯端末300の現在位置の標定に利用され基地局200に記憶させる情報である設定情報を基地局200のネットワークアドレスに対応づけて記憶する。基地局200は、サーバ装置100に自身のネットワークアドレスを送信し、サーバ装置100は、ネットワークアドレスを受信すると対応する設定情報を基地局200にダウンロードし、基地局200は設定情報を受信して記憶する。また基地局200は、RSSI回路を有し、既設基地局200からの固定出力の試験電波の自由空間損失により既設基地局200からの相対距離を求め、これと既設基地局200の設定情報と標定信号による位置標定の結果とに基づいて自身が記憶すべき設定情報を自動生成する機能を有する。
(もっと読む)
速度検知プログラム、位置特定プログラム、車載装置および携帯端末装置
【課題】車載端末装置と連携した携帯端末装置による位置捕捉において、携帯端末装置での処理負荷および消費電力を軽減すること。
【解決手段】車載装置2内の車速パルス取得部が車両から車速パルスを取得し、速度情報加工部が携帯端末での処理負荷を考慮して車速パルスを加工し、加工前の速度パルス周期以下の頻度で携帯端末1に送信することで、携帯端末1が速度情報を受信する際に必要な処理負荷を軽減し、消費電力を削減している。
(もっと読む)
物体又は人物の位置探知システム
【課題】
【解決手段】
静止あるいは移動中の物体(3)または人物の位置を探知するシステムであって、少なくとも1つの高周波通信手段と位置探知装置(2)と、探知対象装置(1)の通信手段との通信を確立するための高周波通信手段とを含んでいる。位置探知装置(2)は、少なくとも1つの角度決定手段(10)と、探知対象装置(1)と位置探知装置(2)との間の距離(d)を決定するために位置探知装置(2)の通信手段によって受信される探知対象装置(1)の通信手段からの信号を処理する手段と、位置探知装置(2)の3つの異なる一時的地理的位置での少なくとも3組のペアの測定値から“方向”ベクトルと称されるベクトルを計算するための計算手段と、をさらに含んでおり、それぞれのペアの測定値は、位置探知装置(2)と探知対象装置(1)との間で計算された距離(d)と角度(θ)とを含んでおり、角度(θ)は、地理的および一時的な第1位置と第2位置との間、あるいは地理的および一時的な第2位置と第3位置との間で位置探知装置が移動した距離を表す直線と地磁北とによって定義され、第1の一時的地理的位置は位置探知装置の起動位置または座標の原点(0,0)である。
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 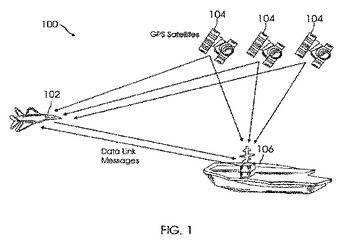 (もっと読む)
(もっと読む)
位置検索システム、携帯端末及び位置検索方法
【課題】位置検索によって消費される消費電流を低減する。
【解決手段】測位衛星102から位置情報が送信され、地図情報提供サーバ104から無線基地局103を介して地図情報が送信され、それぞれが受信された携帯端末101にて、位置情報と地図情報とに基づいて携帯端末101の現在位置から次の分岐点までの距離が算出され、携帯端末101の移動速度が算出され、算出された現在位置から次の分岐点までの距離と移動速度とに基づいて、次の分岐点に到達する時刻が算出され、算出された時刻に携帯端末101の測位が行われる。
(もっと読む)
測量システム
【課題】GPSを使用した位置情報を取得する測量システムにおいて、マルチパス等の影響による不良データを効率よく削除することができる測量システムを提供する。
【解決手段】GPSの信号を受信する受信機と、受信信号に基づいて、受信機の緯度、経度及び高度からなる位置情報を所定の周期で算出する位置情報算出手段と、緯度、経度及び高度の位置情報のそれぞれを所定の基準位置からの相対距離情報を算出する相対距離情報算出手段と、相対距離情報算出手段によって得られた緯度方向、経度方向及び高度方向の相対距離情報を記憶する位置情報記憶手段とを備えた測量システムであって、新たに得られた高度方向の相対距離情報と、直前に得られた高度方向の相対距離情報とを比較して、相対距離の差が予め決められたしきい値より大きい場合に、新たに得られた緯度方向、経度方向及び高度方向の相対距離情報を異常と見なして削除する位置情報削除手段を備えた。
(もっと読む)
一機の低地球軌道衛星を利用する位置決定
【課題】一機の低地球軌道衛星を利用する位置決定。
【解決手段】低地球軌道衛星通信システム100におけるユーザターミナル(例えば、移動無線電話)の位置を決定するためのシステム及び方法。システムは、ユーザターミナル106、既知の位置及び既知の速度である少なくとも1つの衛星104、そして衛星104を介してユーザターミナル106と通信するためのゲートウェイ102(即ち、地上基地局)とを備える。方法は、レンジパラメータを決定する工程802及びレンジレートパラメータを決定する工程806を含む。レンジパラメータは、衛星とユーザターミナルとの間の距離を示す。レンジレートパラメータは、衛星とユーザターミナルとの間の相対的な半径方向速度を示す。そして、地球表面上におけるユーザターミナルの位置は、レンジパラメータと、レンジレートパラメータと、そして衛星の既知の位置及び既知の速度とに基づいて決定される810。
(もっと読む)
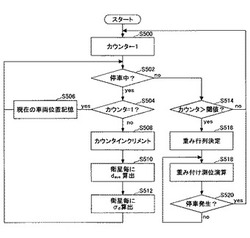
移動局の速度計測装置
【課題】サイクルスリップが発生しても、GPSによる速度計測ができない時間を少なくして移動局の走行速度を計測できる移動局の速度計測装置を提供する。
【解決手段】第1速度計測手段23は、測位手段22からのドプラー周波数Daに基づいて求められるドプラー速度と、加速度を積分して得られる積分速度との差に応じて最適な混合比で融合して移動局の走行速度V1を計測する。第2速度計測手段25は、測位手段22からの移動局の位置Dbに基づいてTD法により移動局の走行速度V2を計測する。切替制御手段24は、サイクルスリップが発生後、サイクルスリップからの回復の初期段階は第1速度計測手段23により上記走行速度V1を計測し、サイクルスリップが発生しないときは第2速度計測手段25により上記走行速度V2を計測するように切り替え制御を行う。この制御により、速度計測の空白期間が少なくなる。
(もっと読む)
測位方法及び測位システム
【課題】
可能な限り高精度な移動通信端末装置の現在位置の測位結果を迅速に取得する。
【解決手段】
移動通信端末装置102が、通信中の基地局の識別子を指定して、GPS衛星の捕捉用情報の要求である第1アシスト要求を行うと、アシストサーバ50は、捕捉用情報とともに該基地局の位置情報を導出し、移動通信端末装置102へ向けて送信する。次に、移動通信端末装置102が、受信した捕捉用情報に基づいて捕捉されたGPS衛星との間の距離の計測結果を指定して、現在位置の算出要求である第2アシスト要求を行うと、アシストサーバ50は、移動通信端末装置102の現在位置を算出し、算出結果を移動通信端末装置102へ報告する。この報告を受けた移動通信端末装置102は、当該報告が算出成功の結果であったときには当該算出結果を、当該報告が算出失敗の結果であったときには基地局の位置を測位結果とする。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
仮設構造体の健全性判定システム
【課題】GPSを利用して被測定物である仮設構造体の健全性を判定する仮設構造体の健全性判定システムを提供することにある。
【解決手段】仮設構造体の健全性判定システム10は、建設用仮設足場11に設置されたGPS受信装置15と、GPS受信装置15の受信機14がGPS衛星12から受信した観測データに基づいてGPSアンテナ13A〜13D間の基線ベクトル17A〜17Eを算出するコンピュータ16とを備えている。コンピュータ16は、基線ベクトル17A〜17Eによって画成された基準三角形22と実測三角形23との比較要素の相違点を用いて建設用仮設足場11の残留変形を測定する。
(もっと読む)
位置検知方法
【課題】 絶対位置検知装置による移動軌跡に相対位置検知装置による移動軌跡をフィッティングさせる際に、少ない種類のパラメータで相対位置検知装置の位置を高精度に決定し維持する位置検知方法を提供する。
【解決手段】 相対位置検知装置の出力値と絶対位置検知装置の出力値とを併用して位置を検知する位置検知方法において、絶対位置検知装置の移動軌跡に相対位置検知装置で求めた移動軌跡をフィッティングさせるための回転角および移動量を求め、相対的位置検知装置の最新位置を上記回転角および移動量で補正し、補正された位置から新たな移動軌跡の検知を開始し、絶対位置検知装置の利用可能な新たな位置情報が得られるまでは、相対位置検知装置の出力値を上記回転角および移動量で補正し続ける。絶対位置検知装置の高精度区間における移動軌跡を用いて、相対位置検知装置の位置を補正できる。
(もっと読む)
測位点推定装置および測位点推定方法ならびにそのプログラムと記録媒体
【課題】ある測位点における現在および未来および過去の位置情報を正確に、また容易に推定することのできる、測位点推定装置を提供する。
【解決手段】IGS点の座標を用いて基線解析によって求めた電子基準点の座標を化成し、また異なる算出時点の間隔単位あたりの電子基準点の移動速度を算出する。そして、ある算出時点に算出された複数の異なる電子基準点の電子基準点化成値とその電子基準点化成値が示す座標について算出された前記移動速度との組み合わせの情報を用いて、複数の異なる電子基準点ごとの同一時点における補正後の電子基準点化成値を算出する。また、複数の異なる電子基準点ごとの同一時点における補正後の電子基準点化成値とそれら各電子基準点における移動速度と、IGS点の座標およびその座標における移動速度とを用いて四次元統合網平均計算式により高精度な座標の推定値と新たな移動速度とを算出する。
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
481 - 500 / 843
[ Back to top ]