
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
681 - 700 / 843
L1/L5バイアス推定を有する広域補強システムのための方法及び装置
広域補強システム(WAAS)は、L1/L5バイアス推定を含む。L1電離層遅延及びL1電離層遅延レートの推定値を受信し、GEO勾配電離層遅延を受信し、GEO衛星のユーザ電離層垂直誤差情報を受信し、L1電離層遅延及びL1電離層遅延レートの推定値並びにGEO勾配電離層遅延からL1/L5バイアス推定値を計算する。 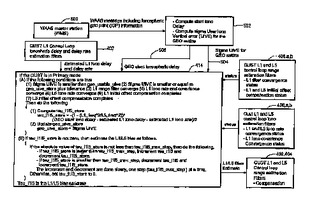 (もっと読む)
(もっと読む)
被追跡物体の位置を確認するための方法およびシステム

【課題】 GPSをベースとして資産または物体の位置を追跡する。
【解決手段】 複数の衛星12から送信されて被追跡物体14で受信した信号相互の間の伝搬時間差に関係するデータを測定し、このデータを中央局16に伝送し、この伝送されたデータに基づいて中央局で被追跡物体の位置を計算する。被追跡物体で受信されるデータには、たとえば衛星識別番号によりそれぞれの関連する衛星を識別するデータを含め、この場合には、被追跡物体の位置を計算するステップは衛星識別番号に基づいて行われる。
(もっと読む)
情報信号の有/無の検出
入力を受信することと、入力の期待分散を算出することと、入力が信号を含むという第1仮説を検証することとを含む、方法。 (もっと読む)
キャリア位相相対測位装置及び方法

【課題】
整数バイアス解の再決定時のみならず、電源投入直後における最初の整数バイアス解の決定時においても、移動体の姿勢情報を用いて整数バイアス候補解の検定を行うことができるキャリア位相相対測位装置及びその方法を提供することを目的とする。
【解決手段】
衛星から送信される測位用信号を受信するために、移動体上に固定された複数のアンテナ1と、加速度及び角速度を計測する慣性センサ3を備えたキャリア位相相対測位装置において、少なくとも最初の整数バイアス解の決定前に、慣性センサ3の観測量を用いて移動体の姿勢情報を算出する基準姿勢演算部6を設け、整数バイアス検定部7により、基準姿勢演算部6で算出した姿勢情報を用いて、整数バイアス推定部4で推定した整数バイアス候補解の検定を行うことを特徴とする。
(もっと読む)
受信装置および周波数偏差計測ユニットおよび測位測距システム
【課題】信号の到達時間差を計測して測位を行うシステムにおいて、高精度な時間差計測を、低消費電力、小型かつ低コストの装置で行う。
【解決手段】本発明は、測位信号を送信する(被測位)ノードと、基準信号を送信する基準局と、上記測位信号および上記基準信号を受信する複数の基地局と、上記複数の基地局とネットワークでつながったサーバと、を有するシステムにおいて、上記複数の基地局が、クロック信号と、該クロック信号をシフトさせる信号とを用いて、上記測位信号と上記基準信号とを受信した時間差および上記基準局との周波数偏差を計測し、上記計測時間差および上記周波数偏差をもとに、上記サーバが上記ノードの位置を算出することを特徴とする。
(もっと読む)
整数解検定装置及び相対測位装置
【課題】 フロート解にバイアス誤差が含まれている場合でも、短時間で高精度に整数解を検定することができる整数解検定装置を得ることを目的とする。
【解決手段】 フロート解a_hatが平均で、そのフロート解の誤差共分散行列Qa_hatが分散共分散行列である多次元正規分布の等確率楕円を求める等確率楕円特定部34と、残差が最も小さい整数解a1_barと、残差が2番目に小さい整数解a2_barとの境界面における接点a2_tildeを特定する接点特定部35とを設け、その接点特定部35により特定された接点a2_tildeを通る等確率楕円内の全確率に基づいて残差が最も小さい整数解a1_barを検定する。
(もっと読む)
ブイ式波高計
【課題】GPSブイによる波高・波向計測において、水粒子運動とブイの運動が一致しないため、正しく計測されない問題および、ブイの水平位置とブイの垂直位置の共分散で波向が計測できない問題および、周期帯別波高、波向も計測されてない問題があった。
【解決手段】第1の問題は、水粒子位置とブイの位置のずれが存在する周波数領域の運動成分を除去するディジタルフィルターを通過させる方法と、ブイ位置と水粒子位置との位置ずれをディジタルフィルターで補正する方法で解決した。第2の問題は、水平位置を微分し、水平速度を求め、水平速度と垂直位置の共分散で求める方法で解決した。第3の問題は、ブイの位置データまたは、推測水粒子位置データを、あらかじめバンドパス等のディジタルフィルターを通し、周期帯別に分別しておき、上述の処理をすることで解決した。
(もっと読む)
速度表示装置
【課題】 移動速度検出精度を向上させた速度表示装置を提供すること。
【解決手段】 移動体において移動速度を検出して表示する速度表示装置が、例えばGPSなどを利用して当該移動体の位置を検出する位置検出手段と、移動体位置の時間変化から当該移動体の移動速度を算出する第一の速度算出手段と、当該移動体の移動に伴って生成されたパルス信号から当該移動体の移動速度を算出する第二の速度算出手段と、第一又は第二の速度算出手段のいずれかによって算出された当該移動体の移動速度を所定の規則に従って選択的に表示する表示手段とを備える。表示手段は、1)第一の速度算出手段によって算出された当該移動体の速度と第二の速度算出手段によって算出された当該移動体の速度との差が所定時間内に所定値を超えたとき、又は、2)当該移動体の速度が所定速度以下となったとき、第一の速度算出手段によって算出された当該移動体の速度を表示する。
(もっと読む)
移動体運動計測装置
【課題】
移動体の運動状態の計測のためのセンサやその算出手段に工夫を凝らして、移動体の運動状態を十分な精度で算出することを図る。
【解決手段】
移動体上の複数箇所に速度ベクトルデータ計測手段を設けて、指定された時間間隔で計測された速度ベクトルデータを使って、前記複数箇所の相互間の距離を拘束条件として前記移動体の運動状態を算出し、その算出された運動状態を前記速度ベクトルデータの計測時刻から指定された遅延時間後に出力する
(もっと読む)
距離比率を用いた移動通信端末機の位置決め方法及びシステム
距離比率を用いた移動通信端末機の位置決め方法およびシステムを提供する。移動通信端末機の位置決め方法は、複数の基地局より基地局識別信号を受信する段階と、前記受信された基地局識別信号から前記複数の基地局と移動通信端末機との間の距離間の比率を計算する段階と、前記距離間の比率から第1変数及び第2変数を生成する段階と、前記第1変数及び前記第2変数から前記移動通信端末機の位置を決める段階と、を備える。  (もっと読む)
(もっと読む)
車載器
【課題】 GPS信号やその処理中の信号等に混入したノイズによる測位精度の低下を抑える。
【解決手段】 複数のGPS衛星から発信されたGPS信号を受信可能な受信手段と、受信された複数のGPS信号を用いて車両の移動に関する情報を計測する移動情報計測手段と、計測に用いられたGPS信号にノイズが含まれているか否かを検出するノイズ検出手段と、該GPS信号にノイズが含まれていると検出されたときに、移動情報計測手段での計測に用いられるべきGPS信号の組み合わせリストを作成するリスト作成手段と、作成されたリストに基づいて移動情報計測手段での計測に用いられるべきGPS信号を組み替える信号組替手段とを車載器に備える。リスト作成手段に、受信手段により受信可能な複数のGPS信号の中から少なくとも一以上のGPS信号を除外した残りのGPS信号について可能な全ての組み合わせのリストを作成させる。
(もっと読む)
PHSによる移動機器の位置探査方法
【解決すべき課題】PHSによる位置探査方法において、許容誤差を正確に推定し、また、荷下ろし時間などを正確に推定することによってトラックや荷役用パレットなどの移動機器の位置を正確に探査することができる方法を提供する。
【課題を解決するための手段】移動する機器にPHS端末を装着し、該PHS端末により周辺の基地局の電波強度を計測して前記機器の位置を計測する位置探査方法であり、且つ該計測位置が予め設定された拠点位置から、予め設定された許容誤差範囲内にあるときに、該機器が該拠点にあると判定する位置探査の方法であって、該許容誤差は、該PHS端末近傍のPHS基地局間隔の線形な式で与えられることを特徴とする移動機器の位置探査方法である。
(もっと読む)
測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体、測位装置
【課題】移動しつつ現在位置を計算する場合において、出力位置の直進性、連続性及び追従性を向上し、真の位置との乖離が小さい出力位置を算出することができる測位装置の制御方法等を提供すること。
【解決手段】測位装置20が、測位位置情報生成ステップと、測位装置20が、速度情報、加速度情報及び進行方向情報の少なくとも1つを構成要素とする移動状態情報を生成する移動状態情報生成ステップと、測位装置20が、移動状態情報に示される構成要素の変化を示す移動状態変化情報を生成する移動状態変化情報生成ステップと、測位装置20が、移動状態変化情報に基づいて、回帰直線Lを生成するための基礎情報の数を決定する基礎情報数決定ステップと、測位装置20が、回帰直線を生成する回帰直線生成ステップと、測位装置20が、現在時刻における回帰直線L上の位置を示す回帰直線上位置情報を生成する回帰直線上位置情報生成ステップ等を有する。
(もっと読む)
位置補正方法及びナビゲーション装置
【課題】 GPS等によって推定した自動車の鉛直方向の位置を精度良く補正することができる位置補正方法、及びナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置1は、自動車(移動体)が受ける重力加速度の進行方向の成分を重力センサ13で測定し、測定した成分の大きさ及び向きにより、自動車が進行する向きの傾斜角を求め、各瞬間での傾斜角及び車速パルスから、自動車が移動することによる鉛直方向への変位量を求める。ナビゲーション装置1は、求めた鉛直方向への変位量に基づいて、GPSにより推定した自動車の鉛直方向の推定位置を補正し、更に鉛直方向の情報を含む地図データを用いてマップマッチングを行うことにより、自動車の推定位置を精度良く補正する。
(もっと読む)
距離測定装置
【課題】 出発点から現在位置および目標位置までの距離を同時に測定して音声で報知できる距離測定装置を提供する。
【解決手段】 スイッチ3を操作したことに応じて、CPU21がGPS受信回路5の出力に基づいて、現在位置の位置情報を計測してその位置情報を現在位置としてメモリ22に記憶し、移動後にスイッチ4からの指令が与えられたことに応じて、現在位置から移動後の位置までの距離と、移動後の位置とメモリ22に予め記憶しているグリーンまでの距離とを算出して各距離をスピーカ6から音声で報知する。
(もっと読む)
測位システム
【課題】測位精度の向上を図った測位システムを提供すること。
【解決手段】ユーザ装置3から伝送される測位衛星の観測データを用いて、基準局装置2の衛星信号受信機211〜21nごとにキネマティック測位を行ってユーザアンテナ位置を決定する。さらに、基準局装置2からユーザ装置3へ、基準局装置2で観測した測位衛星データを伝送し、ユーザ装置3でも独自にキネマティック測位を行う。それぞれ独立してアンビギュィティを解き、それぞれユーザ装置3のキネマティック測位位置を計算する。ユーザ装置3の測位結果は、基準局装置2へ伝送する。基準局装置2で求めた複数のユーザアンテナ位置結果と、ユーザ装置3から伝送されてきたアンテナ位置結果とを比較し、ユーザ測位結果の妥当性を確かめるようにする。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】精度よく現在時刻における位置を推定することができる端末装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号S1等に基づく測位を行う端末装置20であって、衛星信号S1等を受信する衛星信号受信手段32と、衛星信号S1等に基づいて、端末装置20の位置を示す測位位置情報を生成する測位位置情報生成手段と、回転速度センサ、加速度センサ及び磁気センサで構成される移動履歴計測手段36を制御して、予め規定した規定時間間隔で端末装置20の移動方向及び移動距離で構成される移動ベクトルを示す移動ベクトル情報を生成する移動ベクトル情報生成手段と、測位位置情報と、移動ベクトル情報に基づいて、端末装置20の現在時刻における推定位置を示す推定位置情報を生成する推定位置情報生成手段と、推定位置情報を出力する推定位置情報出力手段と、を有する。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム
【課題】精度よく推定位置を算出することができる端末装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、端末装置20の移動方向及び移動速度を示す速度ベクトル情報160を生成する速度ベクトル情報生成手段と、受信環境情報162を生成する受信環境情報生成手段と、受信環境情報162に基づいて、速度ベクトル信頼性情報164を生成する速度ベクトル信頼性情報生成手段と、前回の位置演算処理を行ったときの速度ベクトルの信頼性を示す前回速度ベクトル信頼性情報154、前回の位置演算処理を行ったときの端末装置20の移動方向及び移動速度を示す前回速度ベクトル情報154、今回の位置演算処理における速度ベクトル信頼性情報164に基づいて、今回の位置演算処理における速度ベクトル情報160を補正して、補正後速度ベクトル情報170を生成する補正後速度ベクトル情報生成手段等を有する。
(もっと読む)
携帯インターネット信号を用いた位置測定システム及び方法
【課題】携帯インターネット信号のハンドオーバーのためのパラメーターを用いて、端末の位置を測定するシステム及び方法を提供する。
【解決手段】本発明は、携帯インターネット信号を用いた位置測定システム及び方法に関し、携帯インターネット信号のハンドオーバーのためのパラメーターである相対的な遅延(Relative Delay)情報を用いて端末の位置を測定する。よって、本発明は、既存の携帯インターネットシステムのハンドオーバー時のパラメーターを用いて端末位置を測定するので、測位のための別途のデータ測定が不要になり、ハンドオーバー時のみに使用されたパラメーターを位置測定にも活用することで、携帯インターネットシステムのパラメーター利用効率を向上できる。
(もっと読む)
電波発射源表示装置
【課題】電波発射源の位置を容易に検知できる電波発射源表示装置を提供すること。
【解決手段】電波発射源Tが発射する電波を受信する電波受信部20と、この電波受信部20が受信した受信信号をもとに、電波発射源Tの方向と位置を測定する方位距離測定部30と、電波発射源Tを含む領域の地図データを表示し、かつその表示した地図データ上に電波発射源Tの方向と距離から求めた位置を重ねて表示する表示部60とを具備している。
(もっと読む)
681 - 700 / 843
[ Back to top ]