
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
601 - 620 / 843
無線端末の居場所を特定する方法
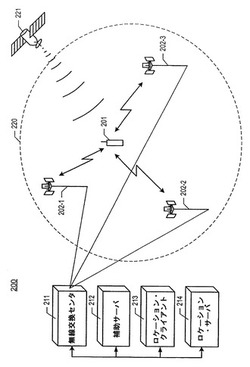
【課題】アシストされたGPS対応の無線端末の位置特定補助データを生成するために、非GPS抽出技術を用いて、無線端末の位置を予測する方法を提供すること。
【解決手段】本発明によると、無線端末は、補助データを使用して1つ若しくは複数のGPS信号を取得し処理し、無線端末の位置の証拠となる情報を抽出する。GPS抽出位置情報は、その後、非GPS抽出位置と組み合わされ、無線端末の位置の予測値を形成する。このGPS抽出技術と非GPS抽出技術との組み合わせは、無線端末が1個若しくは2個のGPS信号しか取得できない場合には特に有用であり、その理由は、無線端末の位置を2個のGPS信号だけで決定するのは不可能だからである。
(もっと読む)
測位装置、測位装置の制御方法及びプログラム

【課題】電波強度が微弱な弱電界下において、測位基礎符号の位相の精度を検証したうえで、精度良く測位することができる測位装置等を提供すること。
【解決手段】各発信源ごとに少なくとも1つの周波数系列において測位装置20が発生するレプリカ測位基礎符号と測位基礎符号との相関処理を行って測位基礎符号の位相を算出する位相算出手段と、現在の前記位相を予測して予測位相を算出する予測位相算出手段と、現在の位相と予測位相との位相差が予め規定した位相差許容範囲内か否かを判断する位相差評価手段と、各発信源ごとに位相差が最小の位相を選択して選択位相とする位相選択手段と、選択位相の信号強度が最大か否かを判断する選択位相第1評価手段と、選択位相が属する周波数系列における前記位相が、連続して位相差許容範囲内であった回数が予め規定した規定回数範囲内であるか否かを判断する選択位相第2評価手段等を有する。
(もっと読む)
位置推定方法及び位置推定システム並びに無線通信端末
【課題】位置推定を行う範囲、リファレンス端末数の増加に伴い、通信量が増加する問題を軽減し、同時に高精度な位置推定を可能とする位置推定システムを得る。
【解決手段】無線信号から位置推定に必要な情報を取得し、少なくとも、取得した位置推定に必要な情報と、リファレンス端末20の位置と、複数の無線機間の距離とに基づき複数の無線機それぞれの推定位置を求め、複数の無線機それぞれの推定位置に基づき、ターゲット端末10の位置を推定する。
(もっと読む)
サブフレーム同期化測距
【解決手段】通信ノード間の距離を決定する方法である。本方法は、第1のノードから少なくとも1つの第2のノードへの初期通信フレーム送信を含む。初期通信フレームは、フレームプリアンブル、第1のデータ及び第1のスイッチポイントを含む。本方法は更に、フレームプリアンブルに基づいて少なくとも1つの第2のノードのローカルクロックを同期化することを含む。受信されたスイッチポイントに基づいて少なくとも1つの第2のノードを送信ノードに切り換える。少なくとも1つの第2のノードから第1のノードに後続の通信フレームを送信する。後続の通信フレームは、測距プリアンブル、第2のデータ及び第2のスイッチポイントを含む。本方法は、少なくとも1つの第2のノードからの測距プリアンブルに基づいて第1のノードのローカルクロックを同期化し、測距プリアンブルに基づいて第1のノードと第2のノードとの間の距離を決定することによって継続する。 (もっと読む)
衛星航法受信機
【課題】異なる信号を用いて測位演算を行う場合であっても、異なる信号毎に発生する擬似距離のバイアスの影響を受けずに正確な測位演算を行うことができる衛星航法受信機を提供することを目的とする。
【解決手段】衛星から、少なくとも2種以上の異なる信号を帯域制限フィルタを用いてフィルタリングし、フィルタリング後の信号から得られる擬似距離を使って測位演算を行う際に、前記異なる信号間の擬似距離バイアスの差分値である信号間バイアスを新たな未知数として、測位演算を行うことを特徴とする。また、本発明は、同じ種類の信号グループ毎にクロックオフセットをそれぞれ求め、その差から前記信号間バイアスを測定し、該測定した信号間バイアスで補正を行った擬似距離を用いて測位演算を行うようにしても良い。
(もっと読む)
車両位置測位装置及び車両位置測位方法
【課題】 軌道上を走る車両において通常の衛星測位を実施すると、軌道位置の考慮がされないため、軌道を外れた位置に測位結果が算出されることがある。
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
(もっと読む)
送信レンジ変化を用いた安定無線ユーザ局在化方式
【課題】送信レンジ変化を用いた安定無線ユーザ局在化方式を提供する。
【解決手段】無線ネットワークの確実局在化方法はネットワーク内の無線装置に異なるパワーレベルで符号化局在化信号を送信するためにアクセスポイント可変送信パワー能力を使用する。無線装置によって収集され、ネットワークコントローラに報告された符号化信号の特定の組み合わせに基づいて、無線装置の位置が位置データベースに含まれる情報と関連して決定できる。
(もっと読む)
衛星航法装置
【課題】衛星航法装置において、キャリアスムージングに用いられる測定コード位相および測定搬送波位相変化量から電離層遅延を除去し、測定コード位相と搬送波位相変化量の間のオフセットを平滑化する時定数を長くして擬似距離の精度を上げること。
【解決手段】L1周波数とL2周波数の2つの周波数にてコード位相と搬送波位相変化量をそれぞれ測定する。コード位相と搬送波位相変化量のそれぞれを電離層フリー線形結合して、電離層遅延を除去したコード位相の真値と搬送波位相の変化量の真値を求め、コード位相の真値と搬送波位相の変化量の真値を用いてキャリアスムージングを行う。
(もっと読む)
位置・姿勢推定装置
【課題】本発明の課題は、複数アンテナを使用するGNSS位置・姿勢推定装置において、装置を複雑化することなく、マルチパス誤差を軽減することにより、姿勢推定精度および位置推定精度を向上させることにある。
【解決手段】本発明の姿勢推定装置は、移動体上に複数のアンテナを搭載し、各アンテナで取得したGNSS衛星信号と装置内部で生成したレプリカ信号の相関をとる相関器において、姿勢角情報を用いて次式で計算した搬送波位相差を拘束条件として課する機能を備え、更に、従来のGNSS姿勢推定装置の機能により得られた姿勢角を初期値とし、前記の拘束条件を有する相関器を用いることにより搬送波位相のマルチパス誤差を軽減し、各アンテナにおける搬送波位相を推定して姿勢角を再度計算する手段を備えるようにした。
(もっと読む)
無線装置およびそれを備えた無線ネットワークシステム
【課題】無線ネットワークシステムを構成する無線装置の位置を自律的に推定可能な無線装置を提供する。
【解決手段】無線ネットワークシステム10を構成する無線装置1は、仮の自己位置wi(t)と近傍に存在する無線装置2〜7の仮の位置wjk(s)(k=1〜6)とに基づいて演算距離dist(t)=|wi(t)−wjk(s)|を演算する。そして、無線装置1は、無線装置1と無線装置2〜7のそれぞれとの間の測定距離dijk(t)よりも演算距離dist(t)を信頼して演算距離dist(t)が測定距離dijk(t)に近づくように仮の自己位置wi(t)を自律的に順次修正し、自己の位置を決定する。無線装置2〜7の各々も、無線装置1と同じ方法によって仮の自己位置を順次修正し、自己の位置を決定する。
(もっと読む)
測位装置及び測位方法及びプログラム
【課題】厳しい受信環境下での乱れた走行軌跡を滑らかにし、測位精度の劣化を抑える。
【解決手段】測位装置100は、測位信号を送信する人工衛星から前記測位信号を受信して所定の情報を抽出し、前記所定の情報を使用して測位計算を行って緯度経度座標値を出力する測位計算部101と、初期値と初期誤差共分散行列と駆動雑音行列と観測雑音行列を読込み、前記初期値と前記初期誤差共分散行列と前記駆動雑音行列と前記観測雑音行列を使用して時間外挿値と伝播誤差共分散行列を計算し、前記測位計算部101が出力した緯度経度座標値を読込み、前記緯度経度座標値を地球楕円体面座標値に変換し、前記地球楕円体面座標値を使用して観測更新値と更新誤差共分散を計算し、前記地球楕円体面座標による観測更新値を緯度経度座標値に変換して出力する整形処理部102と、前記整形処理部102が出力した緯度経度座標値を表示する測位結果表示部103とを備える。
(もっと読む)
GPS測位による位置算出装置
【課題】 GPS測位環境や移動体の高さ方向の動きを監視して、3次元測位を判定するためのしきい値を動的に決定する「GPS測位による位置算出装置」を提供する。
【解決手段】 GPS測位を利用して移動体の位置を算出する位置算出方法は、GPS測位環境の良否を判定するステップと(S101)、測位環境が悪いと判定されたとき、しきい値を下げるステップと(S102)、測位環境が良好と判定された場合に移動体の高さ変動があるか否かを判定するステップ(S103)と、高さ変動があると判定されたとき、しきい値を上げるステップと(S104)を含み、PDOP値がしきい値より大きい場合には2次元測位を行い、PDOP値がしきい値以下の場合には3次元測位を行う。
(もっと読む)
測位計算装置
【課題】移動局GPS受信機が地上に固定されていない条件で、安定かつ高精度な測位座標を得ることを課題とする。
【解決手段】複数のGPS衛星とGPS受信機との間で測定されたコード擬似距離測定値と搬送波位相測定値とを用いて測位座標を計算する測位計算装置であって、基準局搬送波位相測定値および移動局搬送波位相測定値の入力を受け付け、基準局搬送波位相測定値と移動局搬送波位相測定値との測定値差分量を計算し、測定値差分量を用いて、測定値残差の時系列に対して濾過平滑化を行って濾過平滑化測定値残差を計算し、搬送波位相バイアス量の時系列に対して濾過平滑化を行って濾過平滑化搬送波位相バイアス量を計算し、濾過平滑化測定値残差と、濾過平滑化搬送波位相バイアス量とを用いて、複数のエポックに対して測位座標の濾過平滑化された推定値を計算し出力する。
(もっと読む)
建造物健全性判定システム
【課題】GPSを利用して被測定建造物の健全性を判定することができる建造物健全性判定システムを提供する。
【解決手段】この建造物健全性判定システム10は、ビルの屋上に設置されたGPSアンテナ12A〜12DおよびGPS受信機13と、GPS受信機13がGPS衛星から受信した観測データに基づいてGPSアンテナ12A〜12D間の基線ベクトル15A〜15Eを算出するコンピュータ14とを備えている。コンピュータ14は、基線ベクトル15A〜15Eによって画成された基準三角形と実測三角形との比較要素の相違点を用いてビルの残留変形を測定する。
(もっと読む)
車両位置予測方法及び装置
【課題】GPS三次元測位が不能になった後三次元測位が再開されたとき、その間の勾配が大きくても正確な車両位置の選択が可能な車両位置予測方法及び装置とする。
【解決手段】GPSで三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、走行履歴と車速データにより現在の車両位置から移動する可能性のある予測移動範囲を演算し、GPSによる三次元測位が行われないとき、二次元測位、或いはジャイロと車速信号により車両位置を予測する。GPS測位車両位置が前回演算した予測移動範囲に存在するときには、通常その車両位置を採用し、存在しないときには前記予測した車両位置を採用する。しかし、三次元測位から二次元測位等に切り替わり再度三次元測位を行うとき、その間の距離が所定以上で勾配が所定以上の時には、三次元測位再開時の測位地点が予測移動範囲に存在しないときでも三次元測位位置を選択し、以前の走行履歴を削除する。
(もっと読む)
簡易走行路測定システム
【課題】簡易な手法で手軽に軌道の検測を行うことができる簡易走行路測定システムを提供する。
【解決手段】走行路測定システム1は、測定時に車両に搭載される衛星からの電波を受信して前記車両の速度情報を出力するGPS受信機10と、車両の動揺情報を出力する動揺センサ20、各種演算を行うPC30を備える。PC30は、速度情報及び動揺情報を受信して、時間軸上の前記動揺情報を時間軸・距離軸変換し、距離軸上にサンプリングされた動揺情報を算出する。
(もっと読む)
測位方法、測位装置
【課題】より短い時間で単独測位の結果が得られる測位装置を提供すること。
【解決手段】複数の衛星Siが発信する電波の伝播時間に基づき電波を受信した測位装置10の位置を測位する測位方法において、軌道の知られた所定数の衛星の位置を一度のみ算出し(S1)、衛星の位置からの電波の暫定到達時間に基づく疑似距離を算出し(S3)、疑似距離を使用して、単独測位方法により測位装置の位置を測位し(S4)、単独測位の結果、測位装置の時計誤差が所定以上の場合(S5)、当該時計誤差の分だけ疑似距離を補正して単独測位を繰り返す(S4)、ことを特徴とする。
(もっと読む)
情報処理装置及び通信システム及び移動体誘導方法及びプログラム
【課題】無人航空機を自律的に誘導・回収する装置を得る。
【解決手段】GPS衛星15からの測位信号は、GPSアンテナ6とGPSアンテナ7でほぼ同時に受信される。気球3上のGPS受信部10から得られる擬似距離データ及び搬送波位相データは、送信部12により送信され、機体1上の受信部11によって受信される。相対航法計算部13は、受信部11により受信された気球3における擬似距離データ及び搬送波位相データとGPS受信部9から得られる機体1における擬似距離データ及び搬送波位相データを併せて相対航法演算を行い、気球3に対する機体1の相対位置及び相対速度を算出する。相対位置及び相対速度のデータは、誘導制御計算部14に送られ、この誘導制御計算部14によってケーブル2へ機体1を衝突させるための誘導制御量算出が行われる。誘導制御計算部14によって誘導された機体1はケーブル2へ衝突することで減速し、回収される。
(もっと読む)
測位装置及び測位方法
【課題】衛星電波を利用した受信機の速度の算出精度を向上させる。
【解決手段】衛星電波を利用した位置算出に用いた衛星群を、アンカーセットASとし(ステップS61)、このアンカーセットASとこれに含まれない非アンカー衛星NSVaとからなる組み合わせの異なる拡張セットTSを生成し、速度の算出精度が最良の拡張セットTSを特定する(ステップS62)。アンカーセットASの何れかの衛星を用いて組み合わせの異なる排他セットRSを生成し、速度の算出精度が最良の排他セットRSを特定する(ステップS63)。特定した最良の拡張セット及び最良の排他セットのうち、その速度の算出精度がより良い方を速度算出用セットとし、この速度算出用セットを構成する衛星の周波数精度に応じて重み付けを行い、これに基づき衛星電波受信機1の速度演算を行う(ステップS64、S65)。
(もっと読む)
端末測位システム及び位置測定方法
【課題】初期導入、メンテナンス、システムの拡張が容易な位置測定システムを提供する。
【解決手段】少なくとも(N+1)個の基地局(但し、N=1〜3)と測位サーバとを備え、無線通信をする端末のN次元座標における位置を求める端末測位システムにおいて、前記少なくとも(N+1)個の基地局間の距離を計算し、前記各基地局の相対座標を求め、前記求められた相対座標を評価し、前記端末の位置を求める端末測位処理への切り替えを判断し、前記端末と前記基地局との間で送受信される無線信号の伝搬時間、及び前記求められた基地局間の相対座標を用いて、前記端末の位置を求める。
(もっと読む)
601 - 620 / 843
[ Back to top ]