
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
641 - 660 / 843
測位端末及び測位システム
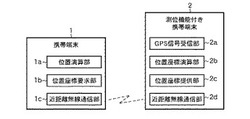
【課題】測位装置や既知の位置に固定的に配置された装置が周辺に無くても、自己の位置を精度良く測位することができる測位端末及びこれを用いた測位システムを提供する。
【解決手段】携帯端末1が、近距離無線通信を行う近距離無線通信部1cと、近距離無線通信部1cの近距離無線通信により、通信相手の測位機能付き携帯端末2の位置座標を取得する位置座標要求部1bと、複数の携帯端末2の位置座標と近距離無線通信の通信可能範囲に関する情報とに基づいて、複数の携帯端末2の各位置における近距離無線通信の通信可能領域を特定し、これら通信可能領域が全て重なる領域の中心位置を自端末1の位置として算出する位置演算部1aとを備える。
(もっと読む)
GPS端末システム、GPSモジュール、及び本体装置

【課題】従来のGPSシステムは、GPSモジュールと本体装置間での通信データがNMEAフォーマットに準拠していれば、GPS受信データとして正常であると判定してしまう為、不正なGPS受信データを出力するGPSモジュールを本体装置に接続してしまった場合に、結果的に誤ったGPS受信データに基づいて動作してしまうという問題があった。
【解決手段】GPSモジュールに認証コードを生成する認証コード生成手段を備え、本体装置に認証コードの検証を行う認証コード検証手段を備えることにより、本体装置がGPSモジュールの認証を行うようにした。また、本体装置に認証コードを生成する認証コード生成手段を備え、GPSモジュールに認証コードの検証を行う認証コード検証手段を備えることにより、GPSモジュールが本体装置の認証を行うようにした。
(もっと読む)
測位装置
【課題】センサの配置やセンサ自体の移動などに対応してセンサ間の同期をとるためのケーブル接続を不要とし、また、時計誤差を補正するための送信局を不要とするために、測位装置内の処理でセンサ間の時計誤差の補正を可能にする。
【解決手段】目標から放射もしくは反射された電波を複数のセンサで受信し、受信した電波の到来時間差に基づいて目標の位置を算出する測位装置において、各センサで複数回受信された電波の到来時間差を算出する到来時間差算出部と、各センサ間の電波の到来時間差を基に、センサ間の時計誤差と電波を受信した各時刻における目標位置を測位する測位部を備える。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 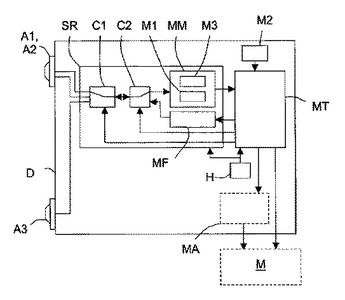 (もっと読む)
(もっと読む)
位置同定方法及び位置同定システム
【課題】送信機の位置を精度高く同定する。
【解決手段】異なる場所の固定局に配備されたフェーズドアレイアンテナAT1〜AT4で、送信機からの電波を受信する。受信信号解析部131〜134は、各固定局における電波の到来方向を求め、送信機位置推定部14は、それらの到来方向交点を送信機の位置の候補として求める。受信電力理論値計算15は、到来方向の交点に送信機があった場合に、複数の固定局で受信する電波の受信電力比の理論値を求める。送信機位置同定部16は、実際の送信機から送信した電波を複数の固定局で受信した際の受信電力比と求めた受信電力比の理論値とに基づいて、送信機の実際の位置を同定する。
(もっと読む)
GPS受信装置
【課題】制御系の処理負担を抑えつつマルチパスやCWノイズ等の影響で受信状態が変化しても精度の高い測位を継続して行う。
【解決手段】測位において算出されたクロック・オフセット値と所定の参照値との差分を算出する差分算出手段と、差分算出手段により算出された差分が所定値よりも大きいとき、測位に利用するGPS衛星の組み合わせを変更する組み合わせ変更手段とを備えたGPS受信装置を提供する。
(もっと読む)
スペクトラム拡散ソフトウェア受信機
【課題】スペクトラム拡散信号を受信して処理するための電力効率のよいソフトウェアベースの解決策を提供する。
【解決手段】スペクトラム拡散信号受信機は、少なくとも部分的にプロセッサが実行するソフトウェアにより具現されるラジオ信号処理部を有する。処理部は、位置信号源(S1からS9)のうちの信号源のサブセットの候補の集合を決定する。集合の各要素は、サブセットから位置/時間関連データを取得するのに必要な予測処理力が、最大特定処理力と等しいかまたはそれ以下であるかという基準によって定められる一群の位置信号源のサブセットである。各サブセットは、位置/時間関連データを生成するのに必要な最小限の数の信号源を含む。処理部は、さらに、最大特定処理力を超えることなく、次の動作期間中に取得可能な最も予測品質が高い位置/時間関連データに関連付けられた候補のサブセットに基づいて、好適な信号源のセットを選択する。
(もっと読む)
移動状態検出装置
【課題】移動体の加速、減速にかかわらず、常に正確に移動体の移動状態を判定することができる移動状態検出装置を提供することを目的とする。
【解決手段】本発明は、移動体速度を算出する速度算出部、例えばGPS受信機2と、移動体の進行方向に対する運動加速度を検出する加速度センサ3と、移動体の前進、後退を判定する移動状態判定部6とを備え、移動状態判定部6が移動体の運動加速度を単位時間だけ積分した値と、前記単位時間における移動体速度の大きさの差分とに基づいて移動体の前進、後退を判定することを特徴とする。これにより、移動体の加速、減速にかかわらず、常に正確に移動体の前進、後退を判定することができる。また、この情報とGPS速度から正確な方位を得ることができる。
(もっと読む)
衛星測位システム、端末、電離層補正データの受信処理方法およびそのプログラム
【課題】衛星測位において、衛星・地上間での電離層補正データの送受信を効率的に行って、すべての電離層補正データを受信しなくても短時間に測位精度を向上させる。
【解決手段】衛星は、例えば、電離層補正データ(以下、補正データという)に係るグリッドポイントが100個の場合、図4(a)の丸内に記載した数字の順番に(6つおきに)グリッドポイントの補正データを配信するものとする。つまり、(A,1)、(H,1)、(E,2)、(B,3)、(I,3)・・・(G,9)、(D,10)、(A,1)、・・・の順に配信するものとする。これに対して、端末は、最初に受信した補正データから15個受信できた時点で(または端末3の位置付近の補正データ受信と同時に)、未受信部分のグリッドポイントの補正データについて補間し、擬似的に面全体のグリッドポイントの補正データを受信したものとして、測位データの補正計算を行う。
(もっと読む)
測位システム、測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】自動車の中の任意の位置において、かつ、使用者の任意の姿勢において使用することができる、車両情報及び衛星電波を使用する測位システム等を提供すること。
【解決手段】車両情報提供装置20は、車両情報を無線で送信する無線送信手段等を有し、測位装置50は、車両情報提供装置20から、車両情報を無線で受信する無線受信手段と、車両情報に基づいて、速度ベクトル情報を生成する速度ベクトル情報生成手段と、車両15の現在の推定位置を示す推定位置情報を生成する推定位置情報生成手段と、衛星電波を使用して測位位置を示す衛星測位位置情報を生成する衛星測位位置情報生成手段と、推定位置と測位位置との平均位置を示す平均位置情報を生成する平均位置情報生成手段と、平均位置情報が生成されている場合には平均位置情報を出力し、平均位置情報が生成されていない場合には推定位置情報を出力する位置出力手段等を有する。
(もっと読む)
無線通信システム及び基地局切り替え装置
【課題】無線通信システムで精度の高い位置検知を可能とする。
【解決手段】エリア40の複数のアクセスポイント(AP)10を用いて携帯端末(MT)20の位置を検知する無線通信システムであり、AP10の役割を固定せず、位置検知用のAP切り替え及び位置検知を、複数段階、実行する。位置検知装置(LD)は、複数の位置検知用のAP10をもとにMT20の位置を検知する。AP切り替え装置(APS)は、LDで検知したMT20の位置に基づいて位置検知用のAP10を切り替える。まずエリア40でMT20に接続していたAP10をMAPとし、離れた4台のAP10を第1SAPとして第1範囲(R1)81で第1の位置検知を行う。次にそれをもとにより狭い範囲となる4台のAP10を第2SAPとして第2範囲(R2)82で第2の位置検知を行い、結果MT20の座標及びMT範囲(r2)80を得る。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】衛星電波の電波強度が極めて弱く、測位符号の積算時間を長時間確保する必要がある場合において、精度良く測位することができる測位装置等を提供すること。
【解決手段】測位衛星からの衛星電波に乗せられている測位基礎符号を使用して、現在位置を測位する測位装置20であって、第1周波数を含む少なくとも3つの周波数において、推定位相における相関値を示す第2相関情報とに基づいて、第2周波数を示す第2周波数情報を生成する第2周波数情報生成手段と、第1周波数情報と第2周波数情報との周波数差分を示す周波数差分情報を生成する周波数差分情報生成手段と、第1周波数に対する周波数差分の割合である周波数差分割合情報に基づいて、第1位相の誤差を示す第1位相誤差情報を生成する第1位相誤差情報生成手段と、第1位相誤差情報に基づいて、第1位相情報を補正して、第2位相を示す第2位相情報を生成する第2位相情報生成手段等を有する。
(もっと読む)
通信端末
【課題】GPSにより取得した測位データを選別可能な通信端末を提供する。
【解決手段】測位ポイントPnで測位した後(S25)、前回、取得した有効な測位ポイントPaと、今回測位したPnとの距離差Ldを算出する(S26)。算出した距離差Ldが、移動体の限界移動距離L以下のときに、測位ポイントの測位データを有効と判断し(S27にてYES)、地図上へのロギングをする(S32)。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】GPS情報を基準とし、方位センサからの方位センサ情報に基づく方位変化量及びGPS情報に基づく方位変化量に関する情報の取得を適切に行い、前記方位センサ情報を補正するための補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】近傍領域arA内と後方領域arB内の双方で直進し、近傍領域arAと後方領域arBとの間で方位変更があった場合に、近傍領域arA内での進行方位と後方領域arB内での進行方位との間のGPS情報に基づくGPS方位変化量ang−GPSと、方位センサ情報に基づくセンサ方位変化量ang−SENとの差異に基づいて、方位センサ情報を補正するための補正係数を演算する。
(もっと読む)
移動通信装置位置決めシステム及び方法
【課題】位置決め信号を比較及び計算する必要がないようにした移動通信装置位置決めシステムを提供することにある。
【解決手段】この移動通信装置は、制御装置と、信号送受信機と、位置決め受信機と、表示部を具える。この場合、位置決め受信機はグローバルポジショニングシステム(GPS)から送信される位置決め信号を受信する。位置決め受信機に結合している信号送受信機は位置決め信号を外部デバイスに送信するように構成される。信号送受信機は外部デバイスから位置決め信号によって決定する位置決め関連情報も受信する。制御装置は信号送受信機と、位置決め受信機と、表示部にそれぞれ接続する。更に表示部は位置決め関連情報を表示するためにある。
(もっと読む)
位置検出方法、および位置検出システム
【課題】無線通信システムのノード位置を検出する位置検出システムで、ノードと周囲基地局間の距離を測定して三辺測量の原理によって求める位置検出方法において、ノードと基地局間で反射波しか受信できない状況においても、正しい位置検出を行う方法を提供する。
【解決手段】基地局において、前記同期信号の識別情報によってノードから送信された観測信号が直接波か反射波かを判定し、サーバにおいて、直接波か反射波かの判定結果を利用してノードと基地局間の距離を補正することにより、反射波しか拾えない環境においてもノードと基地局間の距離を正しく測定することを可能とすることを特徴し、基地局とノード間で見通しを確保しなくても、高い精度の位置検出を実現することができる。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を得ることができる補正係数演算装置を得る。
【解決手段】新たな前記GPS情報を取得する度に、当該取得した現在のGPS情報と、それに対して近い側から順に過去のGPS情報を選択し、選択数が所定数に到達するまで、当該現在のGPS情報に対して更に過去のGPS情報の選択を繰返し、途中に、距離補正係数の演算に不適当と考えられるGPS情報が存在する場合は、学習を終了する。
(もっと読む)
測位システム,測位演算装置,及び測位システム用回路
【課題】複数の航法システムにより相互に独立したタイミングで得られる測位データに基づいて、精度良く測位演算を行う測位システム,測位演算装置,及び測位システム用回路を実現する。
【解決手段】測位システム1は、擬似距離データを出力する衛星捕捉追尾回路11と、センサデータを出力するセンサ5と、それらに対して共通の時間情報を発生する時間情報発生部13と、を備えている。この測位システム1は、各々の測位データに、測位演算に先立って、時間情報を関連付けておく。そして、測位システム1は、測位演算回路20で、時間情報が関連付けられた測位データ間の時間的整合性を図りつつ測位演算を行う。
(もっと読む)
作業機械の位置計測システム
【課題】作業機械の位置計測システムにおいて、作業機械の3次元空間での位置と姿勢及びモニタポイントの絶対位置を演算、表示する際に、車体が静止した状態にあるときは表示のふらつきを低減し、車体が静止した状態にないときは表示の追従性の低下を抑え、ひいては作業効率を向上させる。
【解決手段】GPSアンテナ31,32の3次元位置に基づいて上部旋回体3の位置及び姿勢をグローバル座標系の値で求め、この値のローパスフィルタリング処理を行う。このとき、油圧ショベル1が旋回又は走行をしている場合は、ノイズ成分除去のための高いカットオフ周波数で、そうでない場合は、表示の変動を抑えるための低いカットオフ周波数でローパスフィルタリング処理を行う。この演算値を元に、モニタに地形に対する油圧ショベル1の位置関係を重ね合わせて表示する。
(もっと読む)
641 - 660 / 843
[ Back to top ]