
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
741 - 760 / 843
情報処理装置およびGPS測位方法
情報処理装置は、GPS(Global Positioning System)衛星からの電波の周波数のドップラーシフトを計測し、衛星からの信号を用いて衛星と測定点の擬似距離を計測する。そして、ドップラーシフトと擬似距離を組み合わせて用いることで、測定点の位置を計算する。  (もっと読む)
(もっと読む)
位置認証システムおよび位置算出装置ならびにプログラム
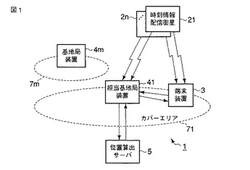
【課題】時刻情報配信衛星から発信された時刻情報に基づいて算出された端末装置の位置情報の正当性を認証・保証する。
【解決手段】本発明の一態様に係る位置認証システム1は、衛星21〜2nから発信された時刻情報を端末側時刻情報として受信する端末3、端末3が無線通信を行う場合の基地局である担当基地局41、端末3から担当基地局41経由で端末側時刻情報を受信し、端末側時刻情報に基づいて端末3の位置情報を求める位置算出装置5とを具備し、担当基地局41は、端末3から端末側時刻情報を受信した場合に、衛星21〜2nから発信された時刻情報を基地局側時刻情報として受信し、基地局側時刻情報を位置算出装置5に送信し、位置算出装置5は、端末側時刻情報と基地局側時刻情報との差が許容範囲内の場合に、端末3の位置情報の正当性を保証する認証情報を作成する。
(もっと読む)
移動体速度検出装置

【課題】
簡素な構造で且つ小型の局部船速演算装置を提供する。
【解決手段】
サテライトコンパス2は測位用信号に基づいて対地船速、船首方位、および回頭角速度を演算して局部船速演算部1に出力する。局部船速演算部1は、対地船速、船首方位、回頭角速度とともに、メモリに記憶されているサテライトコンパス2のアンテナ中心位置から局部位置までの距離と、アンテナ中心位置と局部位置との方位関係とを読み出して、該当する局部位置での局部船速を演算して、表示部3に出力する。
(もっと読む)
位置測定システムおよび位置測定方法
【課題】従来は、屋内での位置測定には向いていないとされる電波強度を使った位置測定でありながら、人等の位置を精度よく測定できる位置測定システムおよび方法を提供する。
【解決手段】位置測定の対象物である無線タグ14と、無線タグ14の位置測定のための複数のアクセスポイントAP1〜AP9と、アクセスポイントAP1〜AP9と直接または間接に接続されたサーバ16とを含み、アクセスポイントAP1〜AP9は、無線タグ14および他のアクセスポイントAP1〜AP9から受信した電波から、電波の強度に関する情報を取得して、取得した情報をサーバ16に送り、サーバ16は、無線タグ14の位置を、三角測量方式、および三角形の内部に無線タグ14があるかどうかにより測定する。
(もっと読む)
クラスタ化測位信号を使用するマルチパス低減用システムおよび方法
測位システムのダイバーシティーシステムが開示される。実質的に同じ位置から送信されかつ/またはで受信される複数の測位信号は、観測中の受信機によって受信され且つ解読される。観測中の受信機は、実質的にコヒーレントな測位信号を比較し、次に選択し、かつ/または測定された測位信号の最適推定値を生成し、正確な位置測定値がマルチパス影響環境で決定されるようにする。  (もっと読む)
(もっと読む)
衛星信号受信システム
【課題】雑音が白色雑音の仮定を成立させないような場合でも、移動体の加速度の変化によらず、常に高い精度の位置情報を算出することができる衛星信号受信システムを提供すること。
【解決手段】測位演算装置により出力される位置情報から、変位特性検出装置によって変位量に関する情報の検出を行う。その変位量に関する情報から、屈折点検出装置によって、変位量の屈折点のタイミングの算出を行う。その変位量に関する情報、変位量の屈折点のタイミング情報を利用し、測位演算装置より出力される位置情報に含まれている誤差の抑圧を行う。
(もっと読む)
位置測定方法およびそれを用いた位置測定装置及び位置測定システム
【課題】測定場所における多様な伝播特性を考慮して測定誤差を低減し得る位置測定方法、それを用いた位置測定装置および位置測定システムを提供する。
【解決手段】測定範囲内の複数の測定点において、互いに異なる各方位の個別方位定数を取得し、互いに異なる方位毎に取得した方位定数と、該複数の測定点からの受信電力の測定結果に基づいて、個別定数を用いた距離対受信電力の関係式により、複数の測定点から無線通信地点までの概算距離を求め、該概算距離に基づいて無線通信地点の概略位置領域を特定する第1ステップと、複数の測定点において、概略位置領域を指す方位に該当する個別方位定数を選択し、複数の測定点からの精密距離を求め、該精密距離に基づいて無線通信地点を詳細に特定する第2ステップで無線通信地点の位置を特定する。
(もっと読む)
ナビゲーション装置の初期位置決定方法
【課題】本発明は、移動通信端末機の位置決定方法に関し、特に、移動通信端末機の位置を決定する無線測位の誤差を改善することで、測位の正確度を向上させるためのGPS衛星の配置を利用した歩行者ナビゲーション装置の初期位置決定方法に関する。
【解決手段】本発明は、ナビゲーション装置の初期位置決定方法において、閾値以上のGPS信号の強度で受信されるGPS(Global Positioning System)衛星の数を算出するステップと、前記受信されたGPS信号から少なくとも2領域の何れか一つに位置するGPS衛星の数を算出するステップと、前記各領域でのGPS衛星の数を比較した結果に従い、初期位置を決定するステップとを含む。
(もっと読む)
マルチパス信号を用いて位置決めを行うためのシステム及び方法
RFの能動的か、受動的か、又は支援された位置確認アプローチのための信号処理技法である。該信号処理技法は、フィルタか又は推定器、例えば、非線形フィルタと共に、追加的な測定値としてマルチパス信号を利用する。前記フィルタは、インダイレクト及びダイレクトパス測定値か又は任意の他の利用可能な信号を使用して、観測可能なインダイレクトパスのパラメトリックモデルを構築する。1つか又は複数のダイレクトパス測定値が、(例えば、障害のせいで)その後、失われる場合には、インダイレクトパス測定値を用いて、人間か又は対象となる物体の位置の推定をフィルタが維持する。  (もっと読む)
(もっと読む)
電波及び光方式3次元測位システム
電波及び光方式3次元測位システム(10)が開示されている。このシステムは、据え置き型で一体型の自己位置測位電波送受信機/レーザ送信機(RTR_LT)(12)と、可搬型で一体型の電波受信機/レーザ検出器(RR_LD)(14)とを備えている。RTR_LT(12)は、第1の複数の外部電波信号を受信し、受信した第1の複数の外部電波信号に基づいて自身の位置座標を決定し、少なくとも1つの内部電波信号を発信し、かつ少なくとも1本のレーザビームを発信するように構成されている。RR_LD(14)は、第2の複数の外部電波信号を受信し、RTR_LT(12)が発信する少なくとも1つの内部電波信号を受信し、RTR_LT(12)が生成する少なくとも1本のレーザビームを検出し、受信した第2の複数の外部電波信号、受信した少なくとも1つの内部電波信号、及び検出した少なくとも1本のレーザビームから成る群から選択された1組のデータに基づいて、自身の3次元位置座標を決定するように構成されている。 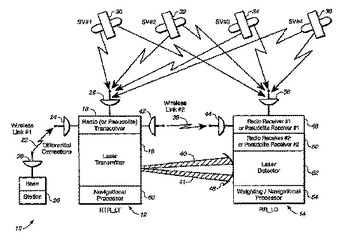 (もっと読む)
(もっと読む)
航法衛星受信機システムおよび信号の弱い環境で高感度航法衛星受信機のウォームスタートを速めるための方法
【課題】ZカウントのスキップおよびGPS受信機の正確な時刻。
【解決手段】航法衛星受信機は高感度の電波周波数フロントエンドおよびクライアントCPUと関連付けられた航法プロセッサを含んで構成される。クライアントCPUは、航法プロセッサとシリアル通信するオペレーティングシステムを走行させる。クライアントCPUはネットワークサーバから航法データシステム送信を取得して、高感度環境で直接衛星信号が弱すぎて直接に復調できないときそれを供給することができる。ウォッチタイプの水晶を有する低電力低周波数の発振器およびカウンタをリアルタイムクロックとして使用して、受信機が休眠状態にあるときには時間の不確定性を50ミリ秒未満に抑える。受信機が再び目覚めたときに時間の不確定性および位置の不確定性が一定の最大値に満たなければ、必要なのは最低数の衛星だけで、各衛星ごとの仮のzカウントを計算しなくていい。
(もっと読む)
建設機械の計測表示機構
【課題】 建設機械本体の姿勢を算定して建設機械の周辺状況と共に表示手段に正しく表示することができる建設機械の計測表示機構を提供する。
【解決手段】 下部走行体及び上部旋回体を有する車体と地中を掘削する作業機とを備えた建設機械に使用され一対のGPS受信機43,44での計測結果に基づいて作業機のモニタポイントの三次元位置を計測して、車体等を建設機械の周辺状況と共にモニタ46aに表示してオペレータに伝達する建設機械の計測表示機構において、GPS受信機43,44での計測結果に基づいて上部旋回体の姿勢に係る値を演算する旋回体の姿勢演算手段と、この上部旋回体の姿勢演算手段で演算された上部旋回体の姿勢に係る値の水平方向の成分の変化に基づいて上部旋回体に対する下部走行体の姿勢に係る値を演算する走行体の姿勢演算手段を車載コンピュータ46に設けて、車体をモニタ46aに表示する場合に下部走行体及び上部旋回体の各姿勢を表示できるように構成した。
(もっと読む)
ナビゲーション・システム
ナビゲーション・システムは現在位置を推測しない第1動作状態と現在位置を指定する第2動作状態を有する第1ナビゲーション・モジュールを含む。第1ナビゲーション・モジュールの第1動作状態に応答して第2ナビゲーション・モジュールが推測航法を行う。 (もっと読む)
自律型GPSの高度化方法および装置
リモート受信機を測位する方法および装置を記述している。一実施例では、長期衛星追跡データがリモート受信機で得られる。移動衛星測位システム(SPS)衛星が検出される。上記リモート受信機から上記検出されたSPS衛星への擬似距離が決定される。上記擬似距離および上記長期衛星追跡データを用いて上記リモート受信機の測位が計算される。SPS衛星は、すでに計算された測位を用いて計算される捕捉支援データおよびブラインドサーチの少なくともいずれか一方を用いて検出される。長期衛星追跡データを使用することにより、上記リモート受信機が、上記衛星からのエフェメリスをデコードすることの必要性を取り除いている。さらに、上記リモート受信機の測位は、サーバまたはネットワークから初期推定測位を得ずに計算される。 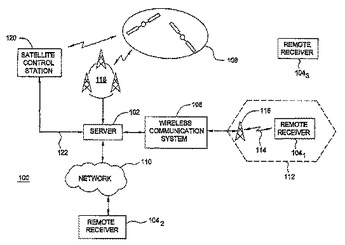 (もっと読む)
(もっと読む)
移動体用航法装置
【課題】 移動体の高度を安価な構成で且つ精度良く検出する移動体用航法装置を得る。
【解決手段】 気圧高度計5では、気圧を計測し、その計測される気圧に応じて移動体の高度を検出する。気圧高度計校正装置6では、気圧高度計5により検出される移動体の高度を、GPS測位装置1により検出される移動体の高度を基準として校正し、複合航法計算装置7では、GPS測位装置1による測位不可時に気圧高度計校正装置6により校正された移動体の高度を利用して移動体の位置速度を計算するようにしたので、GPS測位装置1による測位が不可能になっても、移動体の高度を安価な構成で且つ精度良く検出することができる。
(もっと読む)
サイクルスリップ検出装置及びサイクルスリップ検出方法
【課題】効率的且つ確実にサイクルスリップを検出することが可能なサイクルスリップ検出装置及びサイクルスリップ検出方法を提供する。
【解決手段】人工衛星2aの過去におけるキャリア位相をn次の方程式により最小二乗近似し、これにより未来時刻におけるキャリア位相を推定し、推定されたキャリア位相と、前記の時刻におけるキャリア位相の実測値との差分を求め、この差分と所定の閾値とを比較し、差分が閾値より大である場合に別の人工衛星2bについても同様の処理を行う演算部8と、これにより求められた差分が閾値以下である場合にサイクルスリップが発生していると判定する判定部9とを設ける。
(もっと読む)
到来時刻推定装置
【課題】 受信信号と参照信号の周波数が一致していない場合でも、電波の到来時刻を推定できるようにする。
【解決手段】 受信信号サンプリング部1により受信された信号の時間波形から共分散行列を生成する受信信号共分散行列計算部2と、空間に周期的に発信された信号の時間波形から到来時刻と周波数シフト量の関数であるモードベクトルを計算するモードベクトル計算部3とを設け、その受信信号共分散行列計算部2により計算された共分散行列とモードベクトル計算部3により計算されたモードベクトルを用いてMUSIC処理を実施することにより、受信信号サンプリング部1により受信された信号の到来時刻を推定する。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
GPS受信機を用いる点灯システム
GPS受信機を用いる点灯システムが開示される。特に、GPSを用いる点灯システムにおいて、受信されるGPS信号を用いて日出及び日没時間を算出し、算出された日出及び日没時間に合わせてオン/オフ信号と衛星感知有無信号を出力するGPS受信機と、前記GPS受信機から出力されるオン/オフ信号によって点灯/消灯される保安灯と、前記GPS受信機から出力される衛星感知有無信号によって動作されるLEDと、を含んで構成される。前記のような本発明によれば、GPS受信機自体でGPS衛星信号を受信し、受信された位置情報及び受信情報を算出公式に代入することで、日出及び日没時間を自動に生成して、日出及び日没時間に合わせて保安灯が点灯、消灯されるようにすることで、部品数を画期的に減らし、生産原価を節減して、安い価格で供給することができる。 (もっと読む)
測位装置、測位サーバ装置及び測位システム
【課題】 測位点の測量結果を既存測地系の座標値で算出する。
【解決手段】 移動局1において、GPS測位手段11は、GPS衛星の電波を受信して測位点の概算位置の座標値を算出すると共に、測位サーバ装置30から送信された測位点の補正を行うための補正データを用いて測位点の干渉測位を行い、測位点の世界測地系の座標値を算出する。変換手段12は、測位点の世界測地系の座標値が測位サーバ装置30から送信された図形領域の内部にある場合に、測位サーバ装置30から送信された変換パロメータを用いて、測位点の世界測地系の座標値を既存測地系の座標値に変換する。
(もっと読む)
741 - 760 / 843
[ Back to top ]