
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
821 - 840 / 843
衛星を利用した移動端末の測位
本発明は、衛星を利用した移動端末の測位に関連する。移動端末で測定されたパラメータのエラーを訂正できるような測位が提供される。端末の位置がまずエラー訂正無しでまたは部分的なエラー訂正を伴って計算される(S2;S4‘)。これによって、UEの位置とUEのクロックバイアス、および場合によっては未知数としての送信時刻のオフセットを持つ非線形方程式の集合が、移動端末の位置に関して定義され、線形化され、解かれる。結果の品質が決定され、所定の基準と比較される(S3;S5)。もし結果の品質が十分でなかったら、移動端末の位置は、追加のエラー訂正(S4,S4’;S6)を使って再計算される。ここに提案された方法は、信号受信時刻についてのパラメータまたは疑似距離についてのパラメータ、あるいはその両方に関するエラーの訂正を含んでもよい。エラー訂正は段階的に行っても良い。 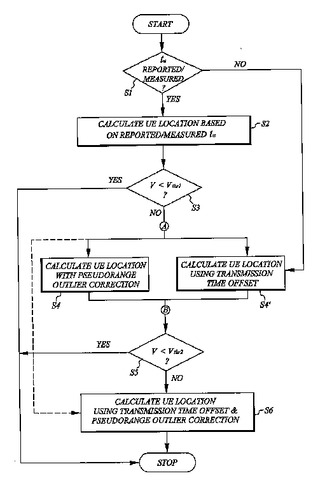 (もっと読む)
(もっと読む)
携帯電話を通して目標位置の方向を取得するための方法
本発明は、携帯電話を通して目標位置の方向を取得するための方法を開示するものであって、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報を取得する過程と、携帯電話の画面に表示されるこの地理的子午線の角度及び現在位置の地理的子午線を決定する過程と、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報に従って現在位置から目標位置への方向を決定する過程と、この方向と地理的子午線との間の仰角を決定する過程とを含む。その画面上に表示される地理的子午線の角度とその仰角とに従って、携帯電話は、現在位置から目標位置への携帯電話の画面上に表示される方向を決定し、表示方向に従って画面上の目標位置の方向を表示する。本発明は、ユーザに目標位置の方向を提供できない既存の携帯電話の問題を解決する。ユーザは、携帯電話を通して目標位置の方向を確認することができる。 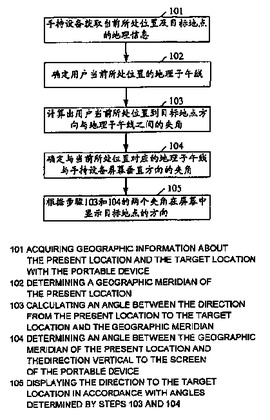 (もっと読む)
(もっと読む)
移動端末における較正時間情報の転送
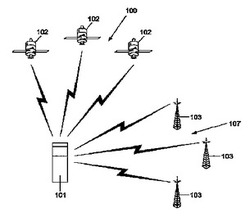
移動端末101内で未較正時間情報を較正する方法システムが開示される。端末は、較正済みシステム(衛星測位システム)によって搬送される較正済み時間情報を抽出することができる信号を受信可能な受信器203と、未較正の安定したシステム(セル通信システム)によって搬送される未較正時間情報を抽出することができる信号を受信可能な受信器200とを有する。較正済みシステムから抽出される較正済み時間情報と未較正の安定したシステムから抽出される未較正時間情報との間の時間オフセットは、未較正の安定したシステムからの信号が利用可能であり、未較正の安定したシステムからの信号の移動時間が既知であるか又は求められ、且つ較正済みシステムからの信号が利用可能である第1の端末位置において求められる。第2の端末位置において未較正の安定したシステムの信号から抽出される未較正時間情報は、第2の端末位置において未較正の安定したシステムからの信号の既知の又は決定された移動時間と求められた時間オフセットとから較正される。 (もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
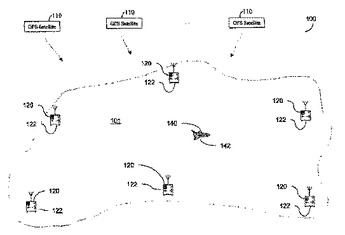
本発明は、ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、別個に利用された際にRTKおよびWADGPSナビゲーション技術に付随する短所が回避される。本方法には、静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化することを含んでいる。その後で、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知の(分散が小さい)として扱われてWADGPSシステム内でユーザー受信器を測位する。
 (もっと読む)
(もっと読む)
試験装置の高精度同期化
真のGPS時刻とCDMA信号の到着時刻との間の遅延を決定するために、GPS受信機は、真のGPS時刻にロックされる第1の基準信号を発生し、この信号をCDMA基地局試験装置に印加する。CDMA基地局試験装置はCDMA信号を受信し、第1の基準信号をサンプルするために使用される内部同期クロックの遷移と実質的に同時に生じる遷移を有する第2の基準信号を発生する。CDMA基地局試験装置は、第2の基準信号とCDMA信号との間の遅延を供給する。周波数/時間カウンターは、第1の基準信号と第2の基準信号との間の遅延を供給する。CDMA基地局試験装置により供給される遅延と周波数/時間カウンターにより供給される遅延の合計は、GPS時刻とCDMA信号との間の遅延を表す。 (もっと読む)
1つ以上の基地局に関して無線移動装置の位置を推定すること

複数の基地局(BTS)を持っている通信網において移動装置(MS)の位置を推定する第1の方法は、MSがBTSのうちの1つのみと通信することができるエリアを決定することを含んでいる。そのエリア内の平均位置が計算され、推定として使用される。第2の方法はMSが2つのBTSのオーバーラップしているカバレージエリア内にあるエリアを決定することを含んでいる。各BTSからMSによって受信された信号の到着の相対時間差が一定の距離点の軌跡が決定される。MSで、1つのBTSの第1および第2のセクター間の相対的な信号電力に基づいた角度θを有する線が、軌跡と交差する点が決定され、MSの位置の推定として使用される。 (もっと読む)
総受信電力を用いた過剰遅延の推定
基地局のカバレージ領域内に位置されている移動体デバイスのポジションを決定するために、移動体デバイスによって受信された基地局からのCDMA信号の到着時間(TOA)が、CDMA信号の受信電力に比例して減少される。移動体デバイスは、受信されたGPS信号と共にCDMA信号の減少されたTOAを使用して、そのポジションを検出する。代わりに、移動体デバイスは、受信されたCDMA信号のTOAおよび電力測定値をポジション決定エンティティ(PDE)に送信する。PDEは、TOAをバイアスし、移動体デバイスのポジションを推定して、支援データを移動体デバイスに送信し、これによって、移動体デバイスがGPS信号を受信できるようになる。受信されたGPS信号単独、または、バイアスされたTOAとの組合せ使用して、移動体デバイスのポジションを再計算する。 (もっと読む)
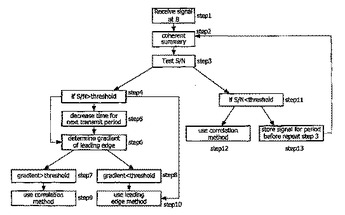
測位方法及び装置
DSSS信号を用いたGPS又はGSMシステムにおいて、正確かつ強固な飛行時間信号処理が、色々なテスト及び環境条件に基づいて先端又は相関技術の選択により達成される。
 (もっと読む)
(もっと読む)
測位装置
複数の固定発信器が放射した電波を受信するセンサ5と、センサ5が受信した電波に基づいて、その電波の前記センサへの到来方向を算出する測角器13と、複数の固定発信器の位置を記憶する発信器位置記憶器14と、発信器位置記憶器14が記憶する固定発信器の位置と電波の到来方向とに基づいて自位置を算出する測位器15と、を備えた測位装置において、測角器13は、電波の一次元到来方向を算出し、測位器15は、センサ5の位置と姿勢との座標成分のうち未知なる成分の数と同数の固定発信器の位置と、それらの固定発信器が放射した電波の一次元到来方向と、を用いて自位置を算出するようにした。 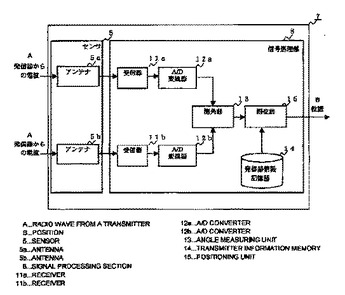 (もっと読む)
(もっと読む)
非同期の受信機クロックを使用して時間同期されたネットワーク性能を達成する位置検出システムおよび方法
監視環境内の物体の位置を検出するシステムは、非同期のクロックを有する受信機にRF信号を送信するタグ送信機を含む。プロセッサは、各受信機と共に動作し、受信機における少なくとも伝搬遅延または処理遅延のうちの一方に基づいてクロックのクロックタイミング関係を決定して、受信機動作を同期する。  (もっと読む)
(もっと読む)
別々のネットワークに分割されたノードにより時間同期されたネットワーク性能を達成する位置検出システムおよび方法
監視環境内の物体の位置を検出するためのシステムは、疎結合ネットワークに配列された受信機を含む。タグ送信機は、疎結合ネットワーク間のネットワークノードおよびブリッジとして働く。プロセッサは、ネットワークごとのクロックタイミング、すなわちすべてのネットワークのシステム時間を定義し、ネットワークごとのクロックタイミングに対するその関係を追跡してすべての受信機を時間同期するよう各ネットワーク内の各受信機と共に動作する。また、プロセッサは、タグ送信機から受信された到着時刻信号の区別を行ってタグ送信機に関連付けられている物体の位置を検出するよう動作する。  (もっと読む)
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
3つ又はそれ以上の搬送波に対するGNSS信号のアンビギュイティ推定
少なくとも3個の搬送波を有する信号から派生した1組のGNSS信号データのファクトライズド処理のための方法及び装置が提供される。ジオメトリ搬送波位相結合を使用して該1組のGNSS信号データに対してジオメトリフィルタを適用して該ジオメトリ搬送波位相結合に対するアンビギュイティ推定値のアレイ及び関連する統計情報を得る。ジオメトリフリー電離層搬送波位相結合を使用して該1組のGNSS信号データに対して電離層フィルタのバンクを適用して該電離層搬送波位相結合に対するアンビギュイティ推定値のアレイ及び関連する統計情報を得る。ジオメトリフリー及び電離層フリー搬送波位相結合を使用して該1組のGNSS信号データに対してクインテセンスフィルタの少なくとも1つのバンクを適用して該ジオメトリフリー及び電離層フリー搬送波位相結合に対するアンビギュイティ推定値のアレイ及び関連する統計情報を得る。複数個のジオメトリフリー及び電離層フリーコード搬送波結合を使用して該1組のGNSS信号データに対して少なくとも1つのコードフィルタを適用して該コード搬送波結合に対するアンビギュイティ推定値のアレイ及び関連する統計情報を得る。その結果得られるアレイを結合して全ての搬送波位相観測値に対するアンビギュイティ推定値の結合したアレイ及び関連情報を得る。 (もっと読む)
広域またはグローバルディファレンシャルGPSシステムのためのクロック補正値を生成するための方法
WADGPSネットワークのための衛星クロック補正値を生成するための方法は、他の実質的な誤差成分を除去した後に、衛星クロック補正値を計算する。電離層屈折影響により引き起こされる誤差は、二周波数GPS測定値を使用して、基準局で取得されるGPS測定値から取り除かれる。マルチパス雑音は、キャリア−位相測定値を用いるGPS擬似距離コード測定値の平滑化により取り除かれる。対流圏屈折影響は、モデル化によって大部分は取り除くことができ、所望される場合、クロック補正値の計算に含まれる小さな確率論的な調整を使用することにより改善できる。前記誤差要因を取り除いた後に、個別基準局について衛星クロック補正値が計算される。そして、衛星を見ることができる基準局に関して衛星クロック補正値の平均または加重平均を取ることにより、複数の衛星のそれぞれに平均クロック補正値が形成される。
 (もっと読む)
(もっと読む)
移動端末位置測定システム
無線伝送路がフェージング等によって変動しても、第一パスの検出確率を向上させ、移動無線端末装置のダウンサイジング化とコスト削減とを図ることが可能な無線基地局装置を提供する。 SIR推定部13−1〜13−NはPilot復調部12−1〜12−nの出力からサブキャリア毎に受信SIRを算出する。SIR平均化部14はサブキャリア毎のSIRの平均を計算して信号全体のSIRを算出する。閾値設定部15はその計算されたSIRを基に、パスサーチ動作のための閾値を設定する。第一パス検出部19は閾値設定部15にて設定された閾値を基にパスサーチを行う。到来時間計算部21は第一パス検出部19で検出された第一パスを基に到来時間を算出する。 (もっと読む)
3個のGPS周波数を用いて搬送波位相の整数値バイアスを解決する方法
本発明は、アンビギュイティが解消され、屈折が補正され、且つノイズが最小化された搬送波位相測定値を生成する方法を含んでいる。本方法は、L1、L2およびL5周波数におけるGPS搬送波位相測定値を用いて第1の合成測定値を形成するステップを含んでいる。第1の合成測定値におけるノイズを減らすべく、本方法は更に、3種のGPS搬送周波数のうち少なくとも2種におけるGPS搬送波位相測定値を用いて第2の合成測定値を形成するステップを含んでいる。第2の合成測定値は、内在するマルチパス・ノイズが小さくなるように形成されるため、これを用いて第1の合成測定値を平滑化して、マルチパス・ノイズを最小化することができる。
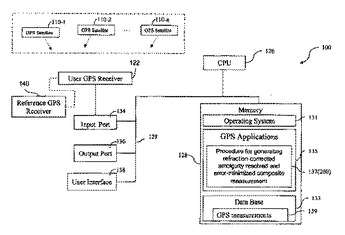 (もっと読む)
(もっと読む)
受信機自動インテグリティ監視、並びに故障検出及び除去の方法
GPS受信機で考慮される複数の衛星に関してGPS受信機により得られる複数のGPS測定結果の中から、不完全な測定結果を検出し識別する方法は、複数のGPS測定結果が不完全な測定結果を含むかどうかを判断する。複数のGPS測定結果が不完全な測定結果を含むという判断に応じて、該方法は、複数の衛星の各々に関連する相関値を計算すること、及び不完全なGPS測定結果の原因となっている衛星として最高の相関値に関連する衛星を選定することにより、不完全な測定結果の原因となっている衛星を識別する。
 (もっと読む)
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 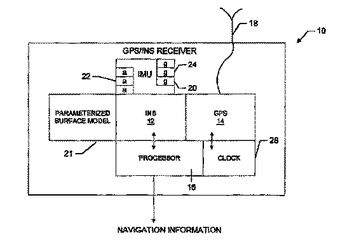 (もっと読む)
(もっと読む)
端末位置特定方法及びそのシステム
測定可能な基地局やGPS衛星の数の総計が2局しかない環境においても、高精度に端末の位置を特定する技術を提供する。端末21における基地局22からの信号の受信時刻と、基地局23からの信号の受信時刻との差分から双曲線11を求め、基地局22と端末21との間の往復伝搬時間から円12を求め、双曲線11と円12の交点を算出し、候補点13と候補点14とを求める。端末21はセクタ27に位置しているので、セクタ27の範囲内に存在する候補点13を端末27の位置として特定する。 (もっと読む)
衛星測位システムにおける高度の支援
衛星測位システム受信機にスペクトル拡散信号を送信する複数の衛星を用いる衛星測位システムであって、その衛星測位システムは、三つのスペクトル拡散信号と、衛星測位システム受信機の高度を概算するデジタル標高データへの多項式表面フィットを用いて、位置を確定することができる。 (もっと読む)
821 - 840 / 843
[ Back to top ]