
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
761 - 780 / 843
目標追尾装置

【課題】 目標の位置や速度ベクトル等の目標の運動を安定して推定する。
【解決手段】 位置が未知である目標に取り付けられた信号源から送出された電波を、位置が既知である複数のアンテナ1で受信し、その受信信号を基に目標の位置、速度の運動諸元を推定するもので、2つのアンテナ1の組み合わせ毎に得られる受信信号の周波数差により、目標と当該アンテナ1とのラジアル速度差を計測するラジアル速度差計測手段22と、ラジアル速度差計測手段22により計測されたラジアル速度差に基づき、目標の位置、速度の運動諸元を推定する速度差による運動諸元推定手段100を備えている。
(もっと読む)
アンテナアレーの向きを決定するための方法
本発明の目的は、衛星支援位置決めシステムにより測定するとき、可能な位相曖昧さの解の数を制限することである。この目的は、より良く制限された検索セクタを可能にする方法によって到達される。この利用のため、アンテナアレーの幾何学的配列についての情報がアンテナアレーの制限を確立するために使用される。この制限は、検索セクタと、許容解の数とを連続して減少することを可能とする。制限は、第1の基線(S01)を規定する2つのアンテナ(A0、A1)間の接続線の利用を含む。処理を早めるために、第1の基線(S01)に対する第2の基線の回転自由度をパラメータ化することにより、この第2の基線が計算できる。  (もっと読む)
(もっと読む)
信号同定方法及び発雷位置標定方法

【課題】 本発明は、時刻誤差の影響を受けにくい最適な検索空間を容易に設定できる信号同定方法を提供することを目的とする。
【解決手段】 本発明の信号同定方法は、複数の不特定信号発信源から断続的に発信されている信号を2つの地点Xと地点Yで観測し、前記地点Xの観測記録中の対象信号を前記地点Yの観測記録中の前記対象信号と同一の可能性のある候補信号と同定する方法において、前記地点Xにおいて前記対象信号が検出された同一の時刻を中心として前記地点Yの前記候補信号を検索する範囲を検索空間とし、前記検索空間は前記地点Xと前記地点Yとの距離と信号伝達速度の商の2倍に設定したことを特徴とする。
(もっと読む)
測位演算機、測位装置および測位演算方法
【課題】 衛星航法システムにおいて測位精度、受信感度、測位中断時の外挿精度の向上を図る。
【解決手段】 演算機300において観測量補正部330はGPS受信機の出力した擬似距離とドップラー量とに基づく衛星と受信機との距離と距離変化率を観測値として出力する。相対運動計算部340は前回の測位演算結果である移動体位置/速度に基づく距離と距離変化率を計算値として出力する。残差計算部350は観測値と計算値との差を残差として出力する。測位演算部370は残差とクロック誤差に基づいてカルマンフィルタ処理により測位演算を行う。このカルマンフィルタ処理においてクロック誤差をクロックバイアスとクロックドリフトとクロックバイアス加速度との3次系とすることを特徴とする。また、クロックリセット検出/補償部360で受信機のクロックリセットに伴うクロック誤差の補償処理においてクロック誤差を3次系で処理することも特徴とする。
(もっと読む)
移動体端末、移動体端末用プログラム及び移動体端末へテーブルデータを提供するシステム
【課題】 GPS測位技術により自己位置データを取得してゴルフプレイにおける各ショット毎の自己位置から目標位置までの距離や飛距離又はウオーキングやジョギングや登山や道のり調査等における曲がり角から曲がり角までの距離を算出して表示すること。
【解決手段】 表示装置の表示画面において、「ゴルフナビゲーション」のコンテンツと「ウオーキング・道のり」のコンテンツを選択でき、前者のときはゴルフプレイにおける各ショット毎に前記自己位置検出手段により自己位置データを記憶し記憶しているテーブルデータから抽出する目標データを用い各ショット毎の自己位置から目標位置までの距離を算出して表示し、後者のときはウオーキングやジョギングや登山や道のり調査等の走・歩行における曲がり角毎に前記自己位置データ記憶機能を働かせて自己位置データを記憶して一の曲がり角から次の曲がり角までの距離及び累計距離を次々に算出して表示する。
(もっと読む)
関数の局所極大又は極小のパラメータを推定するための手順
【課題】関数の局所極大又は極小のパラメータを推定するための手順。
【解決手段】受信された信号から導出された相関関数の局所極大又は極小のパラメータを推定するための方法及びシステム。内挿された局所極大又は極小が、決定される。内挿オフセットは、その後、導出され、内挿された関数の局所極大又は極小の位置とサンプリングされた関数の局所極大又は極小の位置との間の差を備える。パラメータの推定値は、内挿オフセットから導出される。  (もっと読む)
(もっと読む)
MEMSを使用することにより移動電話におけるGPS信号処理を改善するシステムおよび方法
受信器Rが移動端末Uの位置に関係する衛星からデータを取得する衛星Sのコンステレーションを有する衛星測位システム内のユーザ移動端末Uで使用される受信器R。MEMS装置Mは、受信器Rに組み込まれ、移動端末Uの速度の絶対値計算式Iを検出し、続いて上記の値を受信器Uに提供するように構成される。移動端末の速度のベクトル成分(Vux、Vuy、Vuz)に対応する値を、受信器Rによってまたは受信器Rの代わりに計算する手段が提供され、このことは、ユーザ速度に関係するドップラー効果が得られることを可能にする。  (もっと読む)
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】記憶容量の負担を最小限度に止めつつ、簡易な構成によってマルチパス頻発地域において精度よく測位することができる測位装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号S1等を受信する測位装置20であって、マルチパス頻発地域の高度を示すマルチパス頻発地域高度情報を、複数の分割領域の高度情報として格納するマルチパス頻発地域高度情報格納手段と、衛星信号S1等を受信して、高度情報を取得するための高度情報取得用位置情報156を生成する高度情報取得用位置情報生成手段と、マルチパス頻発地域高度情報格納手段から、高度情報取得用位置情報156に対応する分割領域の高度情報155cを取得する高度情報取得手段と、衛星信号S1等及び高度情報155c(158)に基づいて、現在位置を示す高度情報使用現在位置情報160を生成する高度情報使用現在位置情報生成手段と、を有する。
(もっと読む)
カメラの位置及び姿勢情報補正方法及びその装置
【課題】カメラに装着された3ラインスキャナーを介して得られる画像情報を分析し、カメラの位置と姿勢情報とを精密に補正できるようにする方法及び装置を提供すること。
【解決手段】衛星航法装置を用いてカメラの位置を計算するステップと、慣性航法装置を用いてカメラの姿勢を計算するステップと、カメラに装着された3ラインスキャナーを介して入力される画像を分析し、カメラの位置及び姿勢補正情報を生成するステップと、生成された位置及び姿勢補正情報をそれぞれ衛星航法装置と慣性航法装置とにフィードバックするステップとを有する。3ラインスキャナーを介して入力される画像は、前方スキャナー観測画像、直下スキャナー観測画像及び後方スキャナー観測画像とから構成される。人工衛星や航空機、車両などの輸送手段に搭載されたカメラを介して観測された画像に対し、地上基準点を使用しなくともカメラの外部標定要素を精密に決めることができる。
(もっと読む)
測位装置およびそれを用いる位置情報システム
【課題】 携帯電話の端末装置や携帯情報端末に組込まれるなどして、使用者によって所持され、GPS測位を行うとともに自律測位も併用するようにしたセキュリティ端末において、常に良好な測位結果を得られるようにする。
【解決手段】 GPS受信手段11およびGPS測位手段12によるGPS測位結果と、自律測位測位手段13による自律測位結果とを、制御手段15が選択的に採用して、無線通信手段14から通信ネットワーク2を介してセンター装置3へ送信するセキュリティ端末1において、前記制御手段15は、GPS測位を行う度に、GPS測位結果と自律測位結果とから、それぞれに予め設定されるエラー値判断基準に基づき、より正確と推定される方の測位結果を、前記自律測位手段13の初期位置に設定する。したがって、逐次更新され、しかもGPS測位結果をそのまま採用する訳ではなく、初期位置精度を向上できる。
(もっと読む)
無線局方向推定装置及び無線局方向推定・電波発射装置、並びに無線局方向推定方法
【課題】 高精度な無線局の位置推定が可能な無線局方向推定装置及び無線局方向推定・電波発射装置、並びに無線局方向推定方法を提供すること。
【解決手段】 アレーアンテナ1、周波数探知手段2、及び電波到来方向推定手段3により、所望の電波の電波到来方向を推定する。レイトレース法無線局位置推定手段5は、推定された電波到来方向と、3次元地図データを有する標高・地図データベース4からの3次元地図データとに基づき、レイトレース法により無線局の位置を推定する。
(もっと読む)
潮位監視システム,潮位監視システム用の海上ブイ及び地上局装置、潮位監視方法、潮位監視プログラム
【課題】 所定の海域における海面の上下動を検出し、その解析により津波,高潮等の潮位異常を検出するようにした潮位監視装置,潮位監視方法及び潮位監視プログラムを提供する。
【解決手段】 所定海域の海面上に分散配置してアンカーにより係留され、海面高さを測定する測定部と、この測定部で測定された測定値を測定時刻と共に送信する通信部と、を有する複数個の海上ブイ100と、地上の所定箇所に配置され、各海上ブイの通信部から送信されてくる測定値及び測定時刻を受信する通信制御部と、上記通信制御部で受信した各海上ブイからの測定値及び測定時刻に基づいて、上記所定の海域における海面の上下動を解析し、潮位の異常を検出すると共に、各海上ブイの位置情報を参照して、潮位の異常の移動方向及び移動速度を算出する潮位解析部と、を有する地上局装置200と、を設ける。
(もっと読む)
受信装置および受信シーケンスの受信方法
送信装置の位置を求める受信装置は、第1の受信シーケンス(110)の到着時間(120)から送信装置の第1の位置(128)を、第2の受信シーケンス(112)の到着時間(122)から送信装置の第2の位置(129)を求めるために構成される評価手段(105)を備える。また、受信装置は、第1の位置および第2の位置から送信装置の位置(105)を求めるために構成されるコンバイナ(106)を備える。 (もっと読む)
歩行者ナビゲーション装置、歩行者ナビゲーション方法及びプログラム
本発明の歩行者ナビゲーション装置(10A)は、現在位置情報をGPS(20)から獲得する位置情報受信部(12)と、受信した現在位置情報を解析して現在位置を算出する位置情報解析部(13)と、地図情報を記憶するMAPDB(14)と、マルチパスの影響を制御するためのマルチパス制御距離を指定するマルチパス制御部(17)と、位置情報解析部(13)で算出した現在位置と、MAPDB(14)に記憶されている地図情報と、マルチパス制御部(17)で指定されたマルチパス制御距離とに基づいて、現在位置表示情報を算出する中央処理部(11)と、現在位置表示情報を表示する表示部(15)と、距離指定値や経路検索条件の入力及びナビゲーション開始指示を行う入力部(16)と、を備える。 これにより、マルチパスの影響を適宜補正して正確に歩行者の経路をナビゲーションすることができる歩行者ナビゲーション装置を提供する。 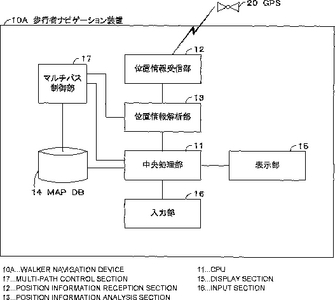 (もっと読む)
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
位置決定におけるアンビギティーの解決方法
【課題】ノイズの有無にかかわらず環境における位置決定におけるアンビギティーを解決するための様々なヒューリスティック技術を使用する方法を提供すること。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
(もっと読む)
測位用受信装置
【課題】 受信信号が反射波であるのか直接波であるのか、あるいはその混合によるものであるのかの判定を高精度に行えるようにして、位置や速度の測定を高精度に行えるようにする。
【解決手段】 判定対象衛星を除く複数の衛星に基づいて受信点の測位を行うとともにその位置変化速度Rvを求め、判定対象衛星の軌道情報と受信点の位置と判定時間とに基づいてその判定時間での判定対象衛星の位置変化速度Svaを求める。また、受信点位置の変化速度Rvと判定対象衛星の位置変化速度Svaを用い、判定対象衛星から直接波を受信している場合に相当するキャリア位相変化速度Cva´を推定する。そして、判定対象衛星からの電波の観測によるキャリア位相変化速度Cvaと判定対象衛星の推定キャリア位相変化速度Cva´とのずれ量εを求め、このεの大きさに応じて判定対象衛星の観測結果の採用の要否や信頼度を求める。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 マルチパスが発生する環境においても、GPS受信機の測位精度を向上させる。
【解決手段】 CPU14は、測位に用いるn個のGPS衛星を捕捉する場合、GPS衛星から送られる電波の受信パワーまたはノイズパワーおよびGPS衛星の仰角に基づいて複数のGPS衛星から高信頼度衛星を選択し、初期位置が安定していることを確保できるなら、全ての高信頼度衛星における近似距離と擬似距離との差分値の平均を基準値とし、各GPS衛星の近似距離と擬似距離との差分から基準値を引いた値を判定値とし、判定値が誤差許容範囲内のn個のGPS衛星を選別し、演算処理部11は、選別されたGPS衛星から求めた近似距離及び擬似距離を用いてGPS受信機の現在地の座標および時計誤差を変数とするn個の関数を生成し、生成されたn個の関数について収束計算を行う。
(もっと読む)
移動体姿勢検出装置
【課題】 測位可能な、天頂に近い2つ程度の少ない数の測位衛星からしか電波が届かないような場所であっても移動体の絶対的な姿勢を検出することができる移動体姿勢検出装置を提供する。
【解決手段】 複数の受信要素1−1〜1−3を配置してなるアンテナ1と、アンテナ1の受信要素又は移動体の位置若しくはこれを近似する概略の位置に関する情報に基づき求められる位置から測位衛星への視線方向を規定する衛星方向情報を求める衛星方向獲得手段2と、少なくとも2つの測位衛星から受信した航法電波について受信要素間の位相差をそれぞれ求め、これら位相差及び衛星方向情報に基づいて測位衛星からの航法電波を受信している少なくとも一対の受信要素の組み合わせの基線ベクトルを検出する基線ベクトル検出手段3と、基線ベクトルにより規定される姿勢を移動体の姿勢として算出する姿勢演算手段4とを備える。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 電源投入後や長時間無測位状態からの測位開始時に、精度の高い初期位置を得ることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置は、測位開始時に、差分距離Lを算出するステップと、少なくとも差分距離Lが閾値より小さいか否かを判定するステップと、閾値よりも小さいと判定されたとき、測位データから算出された位置を初期基準点位置と決定し、閾値以上であると判定されたとき、前回測位時の基準点位置に今回測位時の速度ベクトルを加算した値を暫定的な基準点位置と決定するステップとを有する。
(もっと読む)
761 - 780 / 843
[ Back to top ]