
Fターム[5J062DD23]の内容
Fターム[5J062DD23]の下位に属するFターム
精度 (225)
Fターム[5J062DD23]に分類される特許
381 - 400 / 843
測位システム及び測位方法
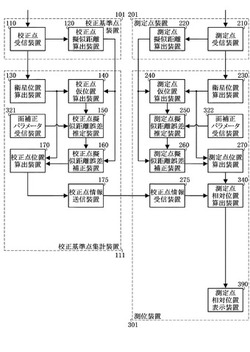
【課題】GPS衛星などが送信した電波を受信することにより受信装置の位置を測位する測位システムにおいて、ミリメートル級の高精度な測位を実現する。
【解決手段】GPS衛星などが送信した電波を、校正点受信装置110及び測定点受信装置210が受信する。受信した電波に基づいて、校正点擬似距離算出装置120及び測定点擬似距離算出装置220が擬似距離を算出する。電子基準点においてGPS衛星などが送信した電波を受信することにより算出した誤差に基づいて、校正点擬似距離誤差補正装置160及び測定点擬似距離誤差補正装置260が擬似距離を補正する。補正した擬似距離に基づいて、校正点位置算出装置170及び測定点位置算出装置270が校正点算出位置及び測定点算出位置を算出する。算出した校正点算出位置及び測定点算出位置に基づいて、測定点相対位置算出装置340が測定点相対位置を算出する。
(もっと読む)
移動体通信端末の現在位置測位計算方法

【解決すべき課題】PHS端末や、携帯電話端末のような移動体通信端末の所在位置を固定基地局の電界強度を利用して高精度に測定する移動体通信端末の現在位置測位計算方法を提供する。
【課題を解決するための手段】送受信手段を具備した固定基地局が発する電界強度を測定して移動体通信端末の現在位置を求める移動体通信端末の位置探査方法において、移動体通信端末が電波を測定可能なそれぞれの基地局の測定電界強度から計算された移動体通信端末からそれぞれの基地局までの距離の合計と、計算地点とそれぞれの基地局との距離の合計との差が最も小さくなるような地点を現在位置とする最小二乗法を用いた移動体通信端末の現在位置測位計算方法。
(もっと読む)
位置算出システム、移動局、位置算出方法、プログラム、及び記録媒体
【課題】基準局側において正確な時刻を低コストで同期することができ、移動局側において基準局との間で時刻同期を行うことなく簡易な装置で高精度な位置算出を可能とする位置算出システム等を提供する。
【解決手段】位置算出システムは、移動局、基準局、時刻基準局から構成される。時刻基準局は時刻同期情報を基準局へ供給し、基準局は時刻同期手段に基づいて時刻基準局の時刻との同期を行う。基準局は、各基準局が共通の単一周波数を用いて異なるタイミングで、基準局の位置情報及び送信時刻情報を位置算出情報として移動局へ供給し、移動局は、位置算出情報から基準局と自局との距離関係及び基準局同士の距離関係を表した関係式を求め、これら関係式から自局の絶対位置を算出する。
(もっと読む)
雑音検出装置及び測位装置
【課題】衛星信号の搬送波位相を利用して測位するときに、各受信機で独立し、さらに各衛星で独立して、受信した信号に含まれるマルチパス雑音とサイクルスリップを検出できるようにする。
【解決手段】マルチパス強度等計算部15では、ある時刻及び別の時刻におけるL1信号及びL2信号にそれぞれ当該信号の波長を乗算する。そして、その乗算後のそれぞれの値について、当該ある時刻の値と別の時刻の値との差を求める。次に、この求めたL1信号の差信号とL2信号の差信号との差を求める。そして、この値の絶対値や二乗値を所定の基準値と比較する。
(もっと読む)
LOS条件及びNLOS条件の下での地図情報を使用した移動端末装置の位置の向上した線形最小二乗推定のための方法
LLS(線形最小二乗)エスティメータが、線形モデルを導き出すのにFT(固定端末装置)の1つを基準FTとして使用して、MT(移動端末装置)の位置の複雑度の低い推定をもたらす。基準FTを選択する任意のアプローチと比べて、位置精度を向上させる、基準FTを選択するための方法が開示される。さらに、共分散行列ベースのLLSエスティメータが、観測の相互の関連を利用して、精度をさらにもたらすようにLOS(見通し線)環境及びNLOS(非LOS)環境において提案される。NLOS(非LOS)条件の下で基準FTを選択するための様々な技法が開示される。地図ベースの2段階LLSエスティメータが、NLOS条件下で基準FTを選択することを支援する。 (もっと読む)
車両位置・方位修正方法及び車両位置・方位修正装置
【課題】GPS受信可能になってから短時間で車両位置、車両方位を正しい位置、方位に修正する車両位置・方位修正方法及び修正装置を提供する。
【解決手段】GPS受信機と自律航法センサーを併用するナビゲーションシステムにおいて、車両位置・方位修正部は、ナビゲーション制御停止時における車両位置と車両方位を保存し、これらをナビゲーション起動時における車両の初期位置と初期方位とする。そして、ナビゲーション起動後、自律航法センサーから得られるセンサー出力信号と、前記車両初期位置と初期方位とを用いて車両位置と方位を推測すると共に、GPS受信機より得られるGPS方位の信頼度が高くなったか監視する。GPS受信機より得られるGPS方位の信頼度が高くなったとき、車両位置・方位修正部は、該GPS方位と推測した車両位置を用いて車両の現在位置を修正する。
(もっと読む)
トレーニングデータの収集方法及びこれを用いた移動体通信端末の位置検出方法
【課題】トレーニングデータ収集のために多大な人的労力,時間,コストを要しないトレーニングデータ収集方法及びこれを用いて高い精度で移動体通信端末の現在位置を検出することのできる移動体通信端末の位置検出方法を提供する。
【解決手段】ある一の基地局A1の設定近傍域内に位置しているPHS端末10が得た電波情報を近似的に一の基地局A1の位置で得た電波情報とみなして、これを一の基地局A1の位置情報と組としたトレーニングデータとなし、同様にして他の各基地局ごとにトレーニングデータを取得する。そしてこれを位置情報提供センタのサーバで収集して、これに基づき各基地局ごとに基地局の位置座標周りの電波強度分布を求めて、電波マップを構築し、その電波マップと位置検出対象としてのPHS端末10から得た現在の受信電波情報とを比較して、PHS端末10の現在位置を検出する。
(もっと読む)
衛星測位システム、衛星測位方法及びそのプログラム並びに記憶媒体
【課題】2周波数受信機を使用する衛星測位システム及び衛星測位方法において、一方の周波数に不具合が生じた場合であっても測位結果への影響を未然に防止する。
【解決手段】入力装置20から入力される2周波数受信信号の異常を、データ処理装置30の異常データ検出部31で位相距離の差に基づき検出し、その検出された異常データをデータ処理装置30の異常データ除去部32で除去して擬似距離及び位相データを出力装置40に出力する。
(もっと読む)
移動局測位システムおよび移動局測位方法
【課題】短時間で基地局間の時刻の補正を行うことのできる移動局測位システムを提供する。
【解決手段】受信間隔算出部82(SA1)により、基準基地局11が1回発信し各普通基地局12が受信した拡散符号列における2つの拡散符号の受信間隔が算出され、クロック速度比算出部54(SA2)により各普通基地局12における受信間隔と基準基地局11による2つの拡散符号の発信間隔とに基づいて各普通基地局12と基準基地局11とのクロック速度比が算出され、時計ずれ算出部56(SA3)により基準基地局11の時計44に対する各普通基地局12の時計の時刻ずれが算出され、受信時刻補正部58(SA4)により、各普通基地局12における移動局10からの電波の受信時刻が基準基地局11の時計を基準とする時刻に補正され、測位部60(SA5)により補正された受信時刻を用いた移動局10の測位が行われる。
(もっと読む)
衛星測位システムにおいて時間を決定するための方法および装置
【課題】衛星測位システムにおいて時間を決定するための方法および装置
【解決手段】一つの実施態様において、基準時間は、他のナビゲーション情報を決定するのに使用される。そのようなナビゲーション情報は、例えば、衛星測位システム(SPS)の受信機のローカル/位置を含む。一つの実施態様において、SPSの受信機と1組の一つ以上の衛星との間の相対速度は、SPSの受信機により示されるような時間と基準時間との間のオフセットを決定するために使用される。本発明の他の実施態様に関して、誤り統計が、基準時間を決定するために使用される。本発明の他の実施態様に従って、衛星の少なくとも位置を各々代表する二つの記録が比較され、時間を決定する。一つの実行において、SPSの受信機は移動であり、前記方法の一つ又は組み合わせにより、基地局に関連して時間と/又は他のナビゲーション情報を決定するように動作する。
(もっと読む)
変位計測装置
【課題】計測誤差の増大を避けながら発信機と受信アンテナ間の距離を延伸することを可能にする。
【解決手段】計測点に設置された計測用発信機1と、発信機1からの電波を受信する複数固定点に設置した受信アンテナ2と、受信アンテナ2間の受信信号の位相を比較して発信機1の位置の変位を計測する変位計測装置であって、受信信号間の共分散行列を計算する共分散行列計算手段6と、共分散行列を固有値分解する固有値分解演算手段8と、固有値分解によって得られる最大固有値の固有ベクトルの位相角を受信位相とみなし、その受信位相と発信機1の位置と受信アンテナ2の位置とに関する方程式を解くことにより、発信機1の位置を算出する測位計算手段9とを備えている。
(もっと読む)
位置測定方法
【課題】 設置位置が既知の基地局と、設置位置が不明の基地局との間で電波が届かない場合でも、設置位置が不明の基地局の設置位置を測定することのできる位置測定方法を提供することを目的とする。
【解決手段】 移動自在な移動局Pが位置P1,P2にあるときにそれぞれ実行される、設置位置が既知の基準局R1,R2および位置が不明の測定対象基地局B1のそれぞれと移動局Pとの間で無線測距信号を送受信し、基準局R1,R2と移動局Pとの間の複数の距離情報に基づいて移動局Pの位置を求めるとともに、測定対象基地局B1との間の距離を求める第1ステップと、上記第1ステップが複数回実行された後に実行される、複数回の第1ステップで求められた、移動局Pの複数の位置情報および移動局Pと測定対象基地局B1との間の複数の距離情報に基づいて測定対象基地局B1の設置位置を求める第2ステップとを有する。
(もっと読む)
位置推定システム及びプログラム
【課題】ターゲットの発射する電波を複数のセンサノードが計測してターゲットの位置を推定する位置推定システムにおいて、遮蔽物や反射物などのいわゆるシャドウイングの影響を受けた環境でも位置推定精度が高い位置推定システム及びプログラムを提供すること。
【解決手段】電波の到来時刻TOAによりターゲットの一時推定点Xtを算出し、電波の受信信号強度RSSにより一時推定点Xrを算出し、XtとXrを比較して信頼度BFを算出し、TOAをBFで重み付け修正し、修正TOAによりターゲットの最終推定点Xを算出する。
(もっと読む)
位置推定方法、位置推定システム及び無線端末
【課題】位置推定を行う領域の伝搬特性が変動する場合であっても、高精度な位置推定を可能とする位置推定方法、位置推定システム及び無線端末を提供する。
【解決手段】ターゲット端末10と、既知の位置に複数配置されるアンカー端末20とが無線信号を授受し、位置推定を行う領域の伝搬特性を示すパラメータを用いてターゲット端末10の位置を推定する位置推定方法であって、ターゲット端末10と複数のアンカー端末20とが授受した無線信号から取得される位置推定に必要な情報と、アンカー端末20の位置とに基づき、所定の伝搬特性を示すパラメータを用いてターゲット端末10の推定位置を求めるステップと、位置推定に必要な情報と、アンカー端末20の位置と、ターゲット端末の推定位置とに基づき、当該推定位置における伝搬特性を示すパラメータを推定するステップとを有する。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、周期的に切替えられる複数のアンテナから発信される高周波信号を携帯端末により受信して相対位相を算出し携帯端末の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための装置およびプログラムに関するものである。
【構成】基地局1において、複数の指向性アンテナ11a〜11dの間隔を1波長以下として周期的に切替えながら高周波信号を発信し、前記指向性アンテナ11a〜11dの指向性の方向を斜め下方に向けて角度を持たせて設置し、携帯端末2により受信される高周波信号の位相差を測定して携帯端末2の相対的な位置関係を高精度で検知するための計算式を開示する。
(もっと読む)
無線システムおよびそのサーバーならびにその基地局
【課題】無線LANシステムにおいて、端末にGPS受信機を追加せずに、該位置を高
い精度で検出することが課題である。
【解決手段】各基地局110,111,112が相互の無線通信により相互の時計のずれ
を検出し、各基地局110,111,112が端末100からの信号の受信時間を測定し、上
記各基地局の相互の時計のずれ分と、上記受信時間と、各基地局の位置とから上
記端末100の位置を検出する。
【効果】端末に位置検出のためのGPS受信機などの追加が不要であり、端末から
の無線パケットの受信時間の測定と基地局間の同期獲得とを共通の機能により実
現するので、高精度の位置検出を低コスト、低サイズで提供する。
(もっと読む)
移動体用測位装置
【課題】衛星電波の受信状態に応じた適切な誤差分散を用いて移動体の位置を測位すること。
【解決手段】本発明による移動体用測位装置は、慣性航法により前記移動体の位置を測位する慣性航法測位手段と、衛星航法により前記移動体の位置を測位する衛星航法測位手段と、前記衛星航法測位手段の測位結果と前記慣性航法測位手段の測位結果との関係を観測量とし、前記慣性航法測位手段で用いられる補正パラメータを状態量として、前記衛星航法測位手段の測位結果の誤差分散を用いて、前記状態量を推定する状態量推定手段と、前記状態量推定手段により推定された状態量を前記慣性航法測位手段の測位に反映させる手段と、前記移動体で受信される衛星電波の受信状態に応じて前記誤差分散を補正する補正手段とを備えることを特徴とする。
(もっと読む)
統合サービスデジタル放送−地上波(ISDB−T)放送テレビジョン信号を使用した位置評定
【課題】デジタルテレビジョン(DTV)送信機からのDTV放送信号に基づいて使用者の位置を決定する。
【解決手段】複数のデジタルテレビジョン(DTV)送信機からのDTV放送信号を使用者端末で受信し、使用者端末と放送DTV信号の中の既知成分に基づくDTV送信機の擬似距離を決定する。決定された擬似距離と各デジタルテレビジョン(DTV)送信機に位置に基づくて使用者端末の位置を決定する。
(もっと読む)
位置推定システム及び無線通信端末
【課題】近距離通信機能を用いた簡単なシステム構成によって、無線通信端末の位置を推定する。
【解決手段】複数の基準局110が設置されている所定エリア内を移動する移動無線機100は近距離無線通信機能を有しており、基準局の近隣を通過する際にその基準局の位置を特定するための位置特定情報を基準局から受信する。移動無線機は、受信した基準局の位置特定情報を受信時刻と関連付けて、交差履歴データとして記憶する。一方、別の移動無線機とすれ違う際には、相手の移動無線機との間で交差履歴データを交換する。そして、自機が通過した直近の基準局の位置、自機が直近の基準局を通過してから相手の移動無線機とすれ違うまでの時間、相手の移動無線機が通過した直近の基準局の位置、相手の移動無線機が直近の基準局を通過してから自機とすれ違うまでの時間に基づいて、2つの移動無線機がすれ違った位置を推定する。
(もっと読む)
車両位置報知システム及びこのシステムに用いられる車両側装置
【課題】車両の周囲環境に依らず正確に車両の存在方位を特定してその方位情報をユーザに報知することができる車両位置報知システムの提供。
【解決手段】車両に搭載された車両側装置と、ユーザが持ち運び可能な携帯機に搭載された携帯機側装置とを備え、携帯機側装置は、車両探索信号を車両側装置に送信する送信部を含み、車両側装置は、互いに離れた位置にあり携帯機側装置から送信された車両探索信号を受信する少なくとも3つの受信アンテナと、各受信アンテナが車両探索信号を受信した時刻の差に基づいて携帯機に対する車両の存在方位を算出する演算部と、存在方位を示す方位信号を携帯機側装置に送信する送信部とを含み、携帯機側装置は、さらに車両側装置から送信された方位信号を受信する受信部と、受信部が受信した方位信号に基づき存在方位をユーザに報知する報知部とを含む。
(もっと読む)
381 - 400 / 843
[ Back to top ]