
Fターム[5J062CC01]の内容
Fターム[5J062CC01]の下位に属するFターム
Fターム[5J062CC01]に分類される特許
1 - 11 / 11
衛星受信機及び信号受信方法
【課題】衛星軌道情報の更新が必要であることを判断可能な衛星受信機及び信号受信方法を提供することを目的とする。
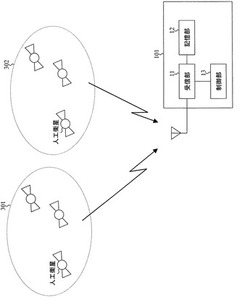
【解決手段】本発明に係る衛星受信機は、複数の衛星航法システム(301、302)に属する衛星を追尾し、衛星からの信号を受信する受信部11と、衛星航法システム(301、302)毎に全衛星の衛星軌道情報を記憶する記憶部12と、受信部11が、衛星航法システム(301又は302)に含まれる衛星からの信号を受信でき、衛星航法システム(302又は301)に含まれる衛星からの信号を所定時間受信不能であるとき、記憶部12が記憶する衛星航法システム(302又は301)の衛星軌道情報を更新することが必要であると判断する制御部13と、を備える。
(もっと読む)
ナビゲーションシステム間の時間関係情報を推定するための方法および装置
少なくとも1つの推定時間関係パラメータを使用する位置/速度推定プロセスを採用することによって、ファーストタイムツーフィックスをできるだけ低減するために、および/または場合によっては、デバイスのパフォーマンスまたは効率を高めるために様々な電子デバイス中に実装され得る方法および装置を提供する。 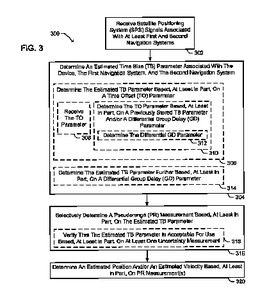 (もっと読む)
(もっと読む)
GNSS受信装置

【課題】CBOC信号であっても確実にコード追尾を行うことができるGNSS受信装置を実現する。
【解決手段】復調部13は、概略コードのサーチ処理を終了すると、BOC(1,1)レプリカコードとベースバンド信号とを相関処理し、ドットプロダクト演算によりコード誤差を検出することで、コード捕捉処理を行う(S102)。復調部13は、C/No等によるステータス情報を取得し(S103)、ステータス情報がコード捕捉完了条件を満たしたことを検出すると(S104:Yes)、BOC(1,1)サブキャリアとBOC(6,1)サブキャリアとを合成した合成レプリカコードとベースバンド信号とを相関処理するように切り替え、この合成レプリカコードを利用したドットプロダクト演算によりコード誤差を検出することで、コード追尾を行う(S105)。
(もっと読む)
マルチキャリア信号からのデータ抽出方法及び装置、その方法の使用方法、その方法を用いるグローバルナビゲーション衛星システム受信器、及び機械可読記憶装置
【課題】本発明は、相互に異なるキャリア周波数を有する複数のデータ信号からデータを抽出する方法を提供する。
【解決手段】少なくとも3個のデータ信号が受信され、各々キャリア周波数を有する搬送波を含み、データを搬送するように変調される。最低キャリア周波数はfLであり、最高キャリア周波数はfHである。第1周波数LO1を有する第1局部信号が生成される。データを搬送する第1混合信号を生成する。第1混合信号は、第1集合のデータを搬送する第1の信号を生成するために、帯域幅BWF(ここで、BWF<(fH-fL))の通過帯域を有するフィルタリング手段でフィルタリングされる。第2周波数LO2を有する第2局部信号が生成される。LO2はLO1と異なる。データを搬送する第2混合信号を生成するために第2局部信号と混合される。2個の混合信号は、第2集合のデータを搬送する第2の信号を生成するためにフィルタリングされる。
(もっと読む)
ナビゲーション衛星システムのチャネル間バイアス較正
【課題】ナビゲーション受信器のチャネル間バイアスを較正する装置および方法を提供すること。
【解決手段】ナビゲーション受信器のチャネル間バイアスを較正する装置であって、基準信号を生成する基準信号回路と、遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、チャネル間バイアスを低減するために補正信号を生成する較正ロジックとを備えている、装置。
(もっと読む)
支援を受ける測位システムの向上
位置測定ユニットは、支援データ処理および中継モジュール(ソフトウェアクライアント)(1318)を有する。支援データ処理および中継モジュールは、全地球航法衛星システム(GNSS)支援データおよび/または非GNSS(たとえば無線測位システム)支援データといった局所化支援データを、支援を行うピア位置測定ユニットから得るとともに、支援を受けるピア位置測定ユニットに局所化支援データを中継する。中継は支援サーバを通じて行われてもよい。GPS受信機のような中継GNSS位置測定ユニットでは、チップ(1310)アーキテクチャは、多重周波数GNSSベースバンド(1311)、長距離通信のためのGSMまたはUMTSベースバンド(1312)、およびブルートゥース(登録商標)、Wi−Fi、またはUWBといった短距離ベースバンド(1313)を有する。支援データ生成モジュール(1316)は、中継GNSSユニットにて、GNSS R.F.フロントエンドおよび/またはGNSSベースバンドおよび/またはGNSSソリューションのソフトウェア部分を実行するマイクロコントローラから局所化支援データを生成する。支援データフィードモジュール(1317)は、GNSS位置測定ユニットのメインモジュールの任意の組合せに支援データを供給する。供給された支援データは、中継GNSSユニット自身または支援を行うGNSSユニットに由来し得る。 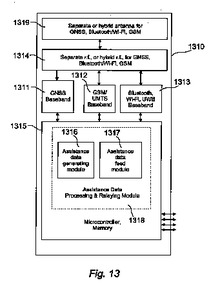 (もっと読む)
(もっと読む)
衛星ナビゲーション・システムにおけるステータス・レポートの最適化方法
【課題】衛星ナビゲーション・システムにおけるステータス・レポートを最適化する方法を提供する。
【解決手段】衛星ナビゲーション・システムの通信網に関する情報を求める情報取得ステップ(S10)と、求めた前記情報を、ステータス・レポートとして、1つまたは複数のナビゲーション・メッセージを介して伝送する情報伝送ステップ(S12)とを含む。
(もっと読む)
受信されるSPS信号における曖昧さを減らすためのシステムおよび/または方法
本明細書で開示される主題は、衛星ナビゲーションシステムにおけるSV(宇宙船)から受信される信号に関連する曖昧さを解決するためのシステムおよび方法に関する。 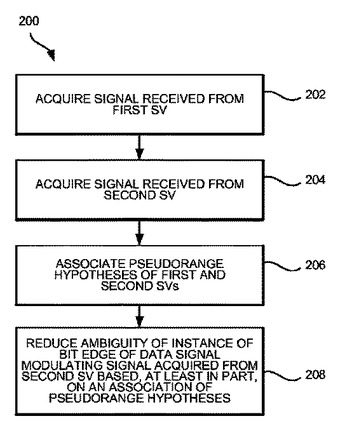 (もっと読む)
(もっと読む)
測位システム,測位演算装置,及び測位システム用回路
【課題】複数の航法システムにより相互に独立したタイミングで得られる測位データに基づいて、精度良く測位演算を行う測位システム,測位演算装置,及び測位システム用回路を実現する。
【解決手段】測位システム1は、擬似距離データを出力する衛星捕捉追尾回路11と、センサデータを出力するセンサ5と、それらに対して共通の時間情報を発生する時間情報発生部13と、を備えている。この測位システム1は、各々の測位データに、測位演算に先立って、時間情報を関連付けておく。そして、測位システム1は、測位演算回路20で、時間情報が関連付けられた測位データ間の時間的整合性を図りつつ測位演算を行う。
(もっと読む)
測位データ処理方法
【課題】 測位センサの一部から測位データが得られなくなっても、複数の測位データの組み合わせ演算で得られる位置データに位置跳びの影響が出ることを回避でき、安定した制御を行うことができる測位データ処理方法を提供する。
【解決手段】 船舶又は浮体の位置制御において、複数の測位センサ1〜Nで検出される複数の測位データXaniに対して、それぞれドリフト補正を行い、該ドリフト補正を行った後のドリフト補正後測位データXcniに対して、それぞれの時系列データのバラツキに応じた加重平均処理を行って、位置制御のための位置データXciを得る。
(もっと読む)
ガリレオ交流バイナリ・オフセット搬送波(AltBOC)信号を処理するためのハードウェア・アーキテクチャ
GNSS受信器は、複素信号の別々に発生された実数及び虚数成分を結合することにより、複素複合信号を局部的に発生するハードウェアを用いて、AltBOC(15,10)、すなわち複合E5a及びE5b、コードを追跡する。AltBOC信号の直角位相チャンネル上にあるデータレス複合パイロット・コード信号を追跡するために、受信器は、レプリカE5a及びE5b PRNコードを生成するPRNコード発生器、並びに上部及び下部の副搬送波の実数及び虚数成分を発生する方形波発生器を動作させる。受信器は、ベースバンドI及びQ信号成分にダウン変換されている受信された信号を、局部的に発生された複素複合コードで乗算することにより、受信された信号から複素複合コードを取り除く。受信器は、次に、相関されたI及びQ促進信号値であるその結果を用いて、中心周波数搬送波位相角追跡誤差を評価する。 (もっと読む)
1 - 11 / 11
[ Back to top ]