
Fターム[5J062AA06]の内容
Fターム[5J062AA06]に分類される特許
1 - 20 / 87
移動体の向きを特定する方法、及び移動体の向きを特定するシステム
AISメッセージを検出するための方法
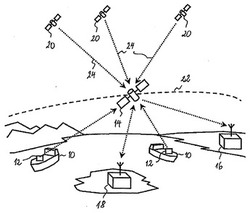
【課題】AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善すること
【解決手段】AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存し、AIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
(もっと読む)
位置情報検出装置および位置情報検出方法

【課題】マルチパスの影響を受けていないGPS衛星の情報を用いて正確に測位演算を行うことができる位置情報検出装置および位置情報検出方法を提供する。
【解決手段】方法は、マルチパスの影響を受けていないGPS衛星の情報を用いて正確に測位演算を行うことを目的として、道路の線形を示す道路線形情報に基づいて、道路上の現在位置から当該道路の延在方向に存在するGPS衛星を選択し、選択したGPS衛星から送信されるGPS信号に基づいて、位置情報検出装置の位置情報を検出する。
(もっと読む)
移動体端末および現在位置判別方法
【課題】衛星測位により得られる衛星測位信号と、屋内において受信した位置情報信号を用いて、移動体端末で正確な現在位置を取得する技術を提供する。
【解決手段】信号処理部7から絶対位置のみが出力された場合にこれを現在位置として判定し、信号処理部7から複数の位置情報が出力された場合に所定の演算処理により現在位置を判定し、信号処理部7から位置情報と絶対位置が出力された場合に位置情報を優先して現在位置と判定し、信号処理部7から何も出力されない場合は最近の現在位置と判定するための現在位置判定部8と、現在位置判定部8の出力結果に対応する地図情報を記憶している地図情報記憶部から該当する地図情報を呼び出して出力する地図情報出力部9を備える。地図情報出力部9からの出力は現在位置が挿入されて表示部10に表示される。
(もっと読む)
方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラム
【課題】少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供する。
【解決手段】方位補正システム100は、道路を含む景観の撮影画像を取得する撮影手段101、前記撮影画像の撮影方位を検知する方位検知手段102、前記撮影画像の撮影位置を検知する位置検知手段103、道路の配置状況を含む地図情報を記憶する地図記憶手段104、及び誤差検出手段105を備える。誤差検出手段105は、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する。
(もっと読む)
人工衛星ベースの受信機に対するSBAS支援情報を持ったAGPSサーバ
【課題】特定の地表位置から視認可能な静止衛星型衛星航法増補システム(SBAS)の情報を提供される航法受信機が、それらから視認可能なSBAS衛星の擬似乱数(PRN)信号をインテリジェントに探索、捕捉、および追跡することができるようにする。
【解決手段】人工衛星航法システム支援サーバは、クライアント位置の表示を含むクライアントの要求に応答するように構成されている。人工衛星航法システム支援サーバは、正確な位置がサーバ要求に含まれる場合には、どの特定のSBASシステムが要求中のクライアントから観測可能であるかを演算する。この場合には、その応答を、人工衛星航法システム支援サーバは、よりコンパクトな応答メッセージに対する関連情報に制限する。
(もっと読む)
停止/移動判定方法
【課題】測位演算を行わずに受信機を備える移動体の停止/判定方法を実現する。
【解決手段】停止/判定方法は、GPS衛星の衛星信号を受信することと、衛星信号を受信することと、衛星信号の所定時間mにおける信号強度を保存することと、所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、閾値を決定することと、パラメーターと前記閾値とを比較し、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。
(もっと読む)
密結合GPSおよび推定車両航法
【課題】密結合GPSおよび推測航法システムは、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両範囲および方向を演算する。
【解決手段】推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補正は、GPS fixから演算され、それは、GPS信号受信の長い休止期間中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。
(もっと読む)
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
(もっと読む)
位置補正装置および車車間通信システム
【課題】自車両(第1の車両)の周辺の障害物(第2の車両や歩行者)が衛星を用いて得た位置情報を、自車両(第1の車両)が前記障害物から受信する際に、衛星の測位情報に基づく位置ずれを考慮して、自車両(第1の車両)が受信した前記障害物の位置情報の位置の精度を向上する。
【解決手段】位置補正装置3を自車両(第1の車両)が備えることにより、自車両において、周辺の障害物が衛星を用いて得た当該障害物の位置情報を車車間受信機10が受信し、自車両が衛星を用いて得た自車両の位置情報をGPS受信部4が取得する。このとき、いずれの位置情報にも、衛星の測位情報に基づく位置ずれ(誤差)が含まれる。そして、算出部9により、GPS受信部4が取得する位置情報の位置ずれ量を算出し、補正部11により、算出部9が算出した位置ずれ量に基づいて車車間受信機10が受信する位置情報の位置を補正する。
(もっと読む)
列車走行実績データ作成システム
【課題】計算処理負荷の小さな算出方法で鉄道網における各列車の走行実績データを作成する。
【解決手段】データベース部は、路線内の所定の基準点における緯度・経度情報、基準駅から基準点までの距離程および基準点から所望の誤差許容距離内で定義された判定エリアの緯度・経度情報を関連付けた判定エリアデータを記憶する。GPS測位データ補正部は、GPS測位データ受信部で受信された測位データの緯度・経度が判定エリアデータに含まれる場合、該当する判定エリアが対応する路線の距離程に列車が存在するものと判定して所定の補正演算を行い、現在時刻における列車の距離程および緯度・経度を含む補正測位データを作成する。走行実績データ作成部は、GPS測位データ補正部で作成された補正測位データを取得し、測位時刻と距離程の関係を示す走行実績データを列車毎に作成する。
(もっと読む)
ターゲット識別装置およびターゲット移動予測方法
【課題】船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置を提供する。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
(もっと読む)
航空機位置測定システム、受信局、データ量削減方法およびプログラム
【課題】通信コストの低減と中央局の負荷の低減とを実現する。
【解決手段】複数の種類の信号のそれぞれを航空機へ向けて送信する送信局と、複数の種類の信号のそれぞれに対する複数の種類の応答信号のそれぞれを航空機から受信し、解読処理して測定用データを生成し、生成した測定用データに受信時刻情報を付与して送信する複数の受信局と、複数の測定用データを受信し、それらに付与された複数の受信時刻情報と、複数の受信局のそれぞれの位置情報とに基づいて航空機の位置を測定する中央局とを有する航空機位置測定システムにおいて、送信局は、中央局にて決定された時刻に基づいた時刻に複数の種類の信号のそれぞれを送信し、複数の受信局のそれぞれは、所定の種類の信号を送信する時刻として中央局にて決定された時刻に基づいて時間帯を設定し、所定の種類の信号に対する応答信号を上記の時間帯以外の時刻に受信した場合、当該受信した応答信号を破棄する。
(もっと読む)
航空機位置測定システム、該システムに用いられる時刻同期方法及び時刻同期プログラム
【課題】航空機の位置の測定精度が向上する航空機位置測定システムを提供する。
【解決手段】航空機から送信されるスキッタ信号が各受信局51i で受信され、ターゲット処理局60により、各受信局51i の設置位置情報及び同各受信局51i でのスキッタ信号の受信時刻の差情報に基づいて、航空機の飛行位置情報(緯度情報、経度情報及び幾何学的高度情報)が求められる。この場合、各受信局51i では、時刻情報受信手段(GPS補強システム受信機52)により、衛星補強システムを構成する衛星から送信される時刻情報tmが受信される。時刻同期手段(タイミング部53、デコード部55)により、当該受信局51i で上記スキッタ信号を受信したときの受信時刻を、GPS補強システム受信機52で受信された時刻情報tmに同期させる。
(もっと読む)
受信装置及びマルチラテレーションシステム
【課題】受信した信号を正確に解読し、有効な信号を使用して航空機の位置を特定する。
【解決手段】受信装置は、信号長判定手段、受渡手段、信頼性判定手段及び有効判定手段を備える。信号長判定手段は、受信信号がショートとロングのいずれであるかを判定する。受渡手段は、信号長判定手段で判定された長さの信号を後段に出力する。信頼性判定手段は、受渡手段から入力する信号のパルスのパターンを規定のパターンと比較し、受信信号の信頼性を判定する。有効判定手段は、受渡手段が出力した信号と信頼性判定手段の判定結果とが所定の条件に該当するか否かにより、受信信号が有効であるか否かを判定する。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
地上補強型衛星航法システム、該システムに用いられる衛星異常検出方法及び衛星異常検出プログラム
【課題】空港周辺の所定距離内の空域で航空機の進入着陸誘導を行う地上補強型衛星航法システム中で、衛星の異常を検出する精度を向上させる。
【解決手段】各測位信号のうちで、傾斜した電離層を越えて伝搬する測位信号があるとき、擬似距離補正値補正手段(擬似距離補正値補正部23a)により、同測位信号に対応した擬似距離補正値に対して、対応する測位衛星(GPS衛星10)の測位手段(GPSアンテナ21、GPS受信機22)に対する仰角の関数で表される電離層傾斜係数を用いて正規分布に近付くように補正して各検定統計量として生成される。衛星異常検出手段(インテグリティモニタ23b)により、擬似距離補正値補正部23aで生成された各検定統計量を用いて各GPS衛星10の異常の有無が検出される。
(もっと読む)
移動体の位置検出方法
【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
(もっと読む)
船舶識別装置
【課題】大規模な処理装置等を実装することなく、他の船舶に成りすましている不審船を検出することができるとともに、精度よく船舶の個体識別を行うことができるようにする。
【解決手段】信号特性照合部17により信号特性が合致していると判定された場合、AIS受信機14により受信されたAIS信号を発信しているAIS装置が搭載されている船舶については利用者IDに係る船舶であると判別し、信号特性照合部17により信号特性が合致していないと判定された場合、あるいは、その利用者IDがデータベース15に登録されていない場合、上記AIS装置が搭載されている船舶については不審船であると判別する。
(もっと読む)
1 - 20 / 87
[ Back to top ]