
Fターム[5H161EE20]の内容
鉄道交通の監視、制御、保安 (8,492) | 列車の制御態様 (323) | その他 (7)
Fターム[5H161EE20]に分類される特許
1 - 7 / 7
信号保安システム及び車上信号装置
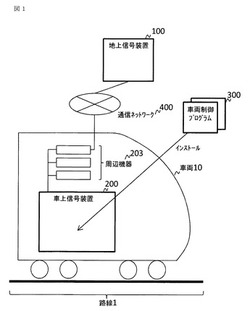
【課題】地上信号装置を介し、路線上を走行する車両に搭載された車上信号装置に対し、当該路線の信号方式に基づく制御指令を送信する信号保安システムにおいて、1つの車上信号装置で異なる信号方式を持つ路線へ乗り入れを可能にする。
【解決手段】車両が、現在走行中の路線から信号方式の異なる路線に進入する際、車上信号装置が、当該進入先の路線の信号方式に準拠した車両制御プログラムをインストールする。そして、車上信号装置がこの車両制御プログラムを実行することで、進入先の路線において、進入先における地上信号装置がその信号方式に基づいて作成した制御指令に従った車両制御を可能にする。
(もっと読む)
在線位置検出方法、ブレーキ制御方法、進路制御方法、車上装置及び管理装置

【課題】在線位置を検出するための新たな仕組みを提案すること。
【解決手段】列車に搭載された車上装置1は、軌道に沿って設置されたICタグ3と非接触式の近距離無線通信を行って、自列車の在線位置を検出する。すなわち、車上装置1は、走行予定区間の軌道に沿って設置されたICタグ3の識別情報であるタグIDが列車の走行順と対応付けられたICタグリスト情報を、走行予定区間の始点出発時に管理装置5から取得する。走行予定区間の走行時は、先頭側車両及び後尾側車両に設置されたタグリーダー120,130によってICタグ3のICタグ情報が読み取られる。そして、車上装置1は、タグリーダー120,130により読み取られたICタグ情報を、管理装置5から取得したICタグリスト情報と照査することで、自列車が在線しているブロックを検知する。
(もっと読む)
列車無線システム
【課題】列車に複数台の受信装置を設置することにより大容量のデータ通信を行い、さらに送信装置の消費電力を抑えた列車無線システムを提供する。
【解決手段】最初に端末無線装置3と集約無線装置4-aで無線パケット6の送受信を行い、端末無線装置3と集約無線装置4-aとの通信が不可となった場合は、端末無線装置3と集約無線装置4-bで送受信して、高速走行する列車でも確実なデータ通信を行なう。更にデータ処理装置5は、集約無線装置4-aと集約無線装置4-bの距離8と列車速度9から、端末無線装置3が集約無線装置4-aと通信不可能となってから集約無線装置4-bと通信可能となるまでの時刻を推測した後、端末無線装置3は集約無線装置4-bと通信可能となるまでスリープ可能となる。更に端末無線装置3は集約無線装置4-aと行った一連のリンク接続手順を集約無線装置4-bとの間で省略して端末無線装置3の消費電力を抑える。
(もっと読む)
自動進路制御装置
【課題】単線区間と複線区間を有する駅において、列車ダイヤの変更が行われた場合の運転整理の過渡期にあっても、列車同士がデッドロックとならない、列車の制御順序を決定する。
【解決手段】単線区間と複線区間を有する駅に設置され、単線区間の列車の通過順序と、番線の使用順序とをそれぞれ作成し、これらに応じて列車を制御する自動進路制御装置であって、単線区間を通過する番線使用順序が第1位の列車と、単線区間通過順序の第1位列車が合致しないときは単線区間通過順序に従って列車運行を行い、番線使用順序に出発順序保留設定された列車を含む場合には次の列車の進入線区・線別が同一でないことをもって番線使用順序を修正する。
(もっと読む)
電気車用気体検知システム
【課題】電気車内の気体を自動的に検知・換気すると同時に、気体の発生場所の映像を撮影し、乗務員及び乗客、さらには外部への当該気体に関する情報の提供を実現する。
【解決手段】気体センサメイン装置200では、異常判定部210の異常発生判定手段211が、気体センサ100により検知された気体に異常が生じているかを判定する。有害レベル分析手段212は、その有害レベルを分析し、レベル判定を実施する。気体情報生成部220は、気体の有害レベルに関する情報と共に、「発生日時」、「列車番号」、「車体番号」、「気体センサ番号」、「カメラ装置番号」等を含む気体情報を生成する。この気体情報生成部220は、各装置及びシステムに気体情報を送信する。
(もっと読む)
保守用車両の制御システム
【課題】非動力車両(第2保守用車両)においても衝突防止制御及び進出防止制御を行うことが可能になると共に、各保守用車両の情報を共有することで前記各保守用車両の乗員が前記情報を確認することができる。
【解決手段】保守用車両14a(動力車両)の無線通信部20から無線52を介して保守用車両14b(確認車両、非動力車両)の無線通信部20に該保守用車両14aの第1現在位置を送信し、保守用車両14bの距離検出部27は、前記第1現在位置に基づいて保守用車両14bの第2現在位置を検出する。これにより、速度センサ42及び車上子50等のセンサ類が搭載されていない保守用車両14bにおいても自車両に対する衝突防止制御や進出防止制御を行うことが可能となる。
(もっと読む)
鉄道車両の走行位置検出方法
【課題】 線路データの曲線形状と通過中に測定した実測データの曲線形状の全体を比べることで軌道狂いの影響を低減して走行位置補正の誤差を少なくする。
【解決手段】 ヨー角速度センサー3及び速度発電機5を備えた車両の通常走行時に、ヨー角速度センサー3で測定したヨー角速度を速度発電機5で測定した走行速度で除して曲線部の実測データの曲率を算出し、この実測データの曲率と予め記憶装置10に記憶させておいた曲線部の線路データの曲率とを相関演算し、該演算により求めた相関値の最大値が設定値以上となった地点を当該車両の走行位置として特定する。
(もっと読む)
1 - 7 / 7
[ Back to top ]