
Fターム[5H301BB03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 建築物に対する作業用 (7)
Fターム[5H301BB03]に分類される特許
1 - 7 / 7
自走式作業機の遠隔操作装置
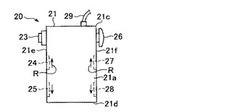
【課題】オペレータの直進操作の負担を軽減することができる自走式作業機の遠隔操作装置を提供する。
【解決手段】それぞれ独立して駆動制御される左側及び右側の走行体を有する自走式作業機の遠隔操作装置であって、遠隔操作装置20の本体21と、遠隔操作装置の本体21の左側面に設けた左前進スイッチ24と、遠隔操作装置の本体21の左側面に設けた左後進スイッチ25と、遠隔操作装置の本体21の右側面に設けた右前進スイッチ27と、遠隔操作装置の本体21の右側面に設けた右後進スイッチ28とを備える。
(もっと読む)
自律移動装置
【課題】構造体により限定された作業空間内で移動する自律移動装置の移動可能な領域が拡大されて作業領域が拡大され、隣接した作業領域へ作業装置を容易に移動させることができる自律移動装置を提供する。
【解決手段】本発明による自律移動装置は、メインフレーム、メインフレームの上部に結合される複数の上部ウインチ及びメインフレームの下部に結合される複数の下部ウインチを含み、作業空間内に位置する移動プラットフォームと、一端部は構造体の下側にそれぞれ結合され、他端部は上部ウインチにそれぞれ連結されて長さが調整可能な複数の第1ワイヤと、一端部は構造体の上側にそれぞれ結合され、他端部は下部ウインチにそれぞれ連結されて長さが調整可能な複数の第2ワイヤと、を含むことを特徴とする  (もっと読む)
(もっと読む)
無線操縦式車両の走行制御方法

【課題】送信機から送信した電波を車両の受信機で受信できなくなった場合に対処できる無線操縦式車両の走行制御方法を提供する。
【解決手段】送信機19から送信した電波により、この電波を受信するラジコン受信機16を搭載した作業機械車両11を無線操縦し、作業機械車両11は、移動しながらGPS受信機17により取得した自身の移動軌跡の位置座標を記録する。送信機19とラジコン受信機16との間で通信用の電波が途絶えたときに、作業機械車両11は、それまでに移動しながら記録した位置座標を逆にたどって、送信機19から送信された電波をラジコン受信機16で受信できる電波到達域A内まで戻る。
(もっと読む)
移動体
【課題】取り扱い容易で破損の危険性の低い移動体を提供する。
【解決手段】移動体1の本体部10は左クローラユニット12Lと右クローラユニット12Rをハウジング11で連結したものである。本体部10の上面にはカメラユニット20と運搬用ハンドル30が設けられる。運搬用ハンドル30の最上位箇所はカメラユニット20の最上位箇所以上の高さとなっており、移動体1が転倒したとき、運搬用ハンドル30はカメラユニット20の保護の役割を果たす。運搬用ハンドル30は本体部10の重心CGよりもカメラユニット20寄りに設けられている。ハウジング11と左右クローラユニット12L、12Rの境界で、それぞれの外殻板同士が合わさって板が二重になった箇所に、運搬用ハンドル30の根元が固定される。運搬用ハンドル30の側面には障害物センサ25が設置される。
(もっと読む)
遠隔操作システムおよび遠隔操作装置
【課題】不慣れな操作者でも移動体を容易に遠隔操作できる遠隔操作システムおよび遠隔操作装置を提供する。
【解決手段】遠隔操作システム10に含まれる遠隔操作装置14のCPU44は、移動体12からの過去情報および最新の移動体情報に基づいて過去情報を選択し仮想視点Vを決定する。CPU44は、グローバル座標系GCに、選択された過去情報に基づいて3次元環境画像Kと仮想視点Vとを生成し、最新の移動体情報と移動体モデルMに関するデータとに基づいて移動体モデルMを生成し、最新の移動体情報と操舵ユニット52からの入力量とに基づいて第1補助モデルM1と第2補助モデルM2とを生成する。そして、CPU44は、3次元環境画像Kと移動体モデルMと第1補助モデルM1と第2補助モデルM2とを仮想視点Vから切り出し中心点Q方向に透視投影して合成画像を生成し、当該合成画像をモニタ36に表示する。
(もっと読む)
建設機械のレベリング制御システムとその制御方法
【課題】建設機械のレベリング制御システムとその制御方法に係る。
【解決手段】下部フレームと上部旋回体がチルト手段で組み合わされた建設機械のレベリング制御システム1において、基準水平面に対する下部フレームと上部旋回体の捩れ角度及び建設機械の走行速度と、作業装置の作業状態情報を検出し、上部旋回体のレベリング制御のための補正角度を算出し、補正角度に応じてアクチュエータの作動を指示する制御信号を生成する。基準水平面に対するレベリングを行うオートレベリングモードモジュールと、停止状態で基準水平面に対するレベリングを制限時間内に行うリレベリングモードモジュールと下部フレームに対するレベリングを行うトラックレベリングモードモジュールが含まれる制御部40と、制御信号を受信し、レベリング制御を行う駆動部50とで建設機械のレベリング制御システムを構成する。
(もっと読む)
作業車両に於けるポジション制御装置
【課題】 車体のエンジン始動時に作業機昇降用のアクチュエータの駆動を禁止する牽制装置を設けた作業車両に於いて、牽制装置の作動を解除するタイミングを改善して確実な牽制解除を実行する。
【解決手段】 ポジションセンサの計測値とリフトアーム角センサの計測値が一致する設定点(A)を中心として、その上方に所定範囲の上部制限領域(+B)を設けるとともに、その下方に上部制限領域と同一幅の下部制限領域(−B)を設けておく。牽制装置が作動しているときに、リフトアーム角センサの計測値が設定点(A)にあり、ポジションセンサの計測値(C1)が上部制限領域(+B)の外にある場合、または下部制限領域(−B)の外にある場合は、この制限領域の外から一方の制限領域を通り抜けて他方の制限領域に入ったときに、牽制装置の作動を解除する。
(もっと読む)
1 - 7 / 7
[ Back to top ]