
Fターム[5H301JJ05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の速度制御、起動・停止時の制御 (362) | 重量に応じて速度制御特性を変更するもの (9)
Fターム[5H301JJ05]に分類される特許
1 - 9 / 9
重心角推定方法及び同方法によって制御される倒立車輪型走行体
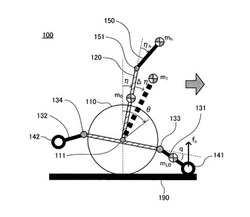
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
搬送装置

【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
車両
【課題】路面勾(こう)配に応じて車両の目標加速度を制限することによって、坂道であっても車体が路面に接触することなく、適切にバランスを保つことができ、路面勾配に関わらず、車両の安定した走行状態を実現することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面勾配に応じて車両加速度の目標値を制限するものであって、該車両加速度の目標値の制限値を、車体接地に対応する制限値と駆動トルクの最大値に対応する制限値とのうちの少なくとも1つに基づいて設定する。
(もっと読む)
移動体
【課題】ランドマークを誤認識する可能性を低減することが可能な移動体を提供する。
【解決手段】予め設定された測定領域に存在するランドマーク25までの距離及び角度を計測するレーザレンジファインダ12と、前記測定領域を決定する測定領域決定部45を有し、レーザレンジファインダ12の計測結果に基づいて予め教示された走行経路上を走行するように走行を制御する制御装置34とを備える。
(もっと読む)
倒立振子型車両の制御装置、制御方法、および制御プログラム
【課題】倒立振子型車両の接地面が移動したり移動を停止したりして対接地面速度の勾配が突然変化する場合でも安定して走行させる。
【解決手段】倒立振子型車両の制御ユニットは、車輪体が接地する第1の接地面に対して、進行方向にある第2の接地面が相対的に移動している場合のその相対的接地面速度を取得する接地面速度算出部81と、車輪体とこれが接地する接地面との接地部分の接地面加速度と車輪体の円周加速度とを取得する傾斜センサと、接地面加速度と円周加速度との加速度差分を計算し、この加速度差分に基づいて車輪体の前記第1の接地面から前記第2の接地面への進入を検知し、相対的接地面速度に応じて倒立振子型車両の移動速度を変更させる回転角加速度補正部83および姿勢制御演算部80とを備えた。
(もっと読む)
搬送装置
【課題】例えば半導体装置製造用の各種基板等が収容された容器などの被搬送物を、カーブを含む軌道上で搬送する搬送装置において、カーブにある障害物との衝突を回避する。
【解決手段】搬送装置(20)は、カーブ用速度で走行すべきカーブした第1軌道区間、及び第1軌道区間に隣接し且つ第1軌道区間の上流側にあると共にカーブ用速度で走行すべき第2軌道区間を有する軌道に沿って、被搬送物を搬送する。搬送装置は、被搬送物が積載される積載部を有すると共に軌道上を走行する搬送手段(3)と、搬送手段が第2軌道区間に進入したか否かを判定する判定手段(6,10)と、第2軌道区間に進入したと判定された場合に、カーブ用速度で走行するように搬送手段を制御する走行制御手段(10)とを備える。
(もっと読む)
無人搬送車の横行姿勢制御装置及び横行姿勢制御方法
【課題】装置を複雑化することなく、また製造コストを安価に抑えることができる無人搬送車の横行姿勢制御装置及び横行姿勢制御方法を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢制御装置であって、車両が正しい姿勢であるときは前側の駆動ユニットと後側の駆動ユニットとが同時に通過するように軌道に設けられたチェックポイントを、前側の駆動ユニットと後側の駆動ユニットとが通過する時間差に基づいて車両の横行状態を推定する横行状態推定手段(S2)を有する。
(もっと読む)
多軸移動体の各駆動装置の制御パラメータ決定方法およびその装置
【課題】搭載物を搭載した移動体の場合、従来は重心位置のずれを考慮していないため移動体の走行時に各駆動輪に適正な指令を与えることができなかったが、本発明により重心位置のずれを考慮した安定な走行ができる移動体の駆動装置の制御パラメータ決定方法を提供する。
【解決手段】重量不明の搭載物Wを多軸移動体1の上に重心位置がずれた状態で置き、一定速度に到達するまで多軸移動体1を直線に走行させたときに発生する各駆動装置3a〜3cのトルクを検出し、検出した各トルクから各駆動装置3a〜3cのトルク比を求め、このトルク比から重心位置のずれた距離を推定し、推定した距離を制御パラメータとして演算するようにした。
(もっと読む)
移動体の走行制御装置
【課題】 スリップを起こさない範囲でできるだけ動作時間を短くできる移動体の走行制御装置を提供する。
【解決手段】 高さ位置を可変可能に設置された昇降台101と、移動方向の前後にそれぞれ形成された各車輪7、8と、各車輪7、8をそれぞれ駆動する各モータ5、6とを備えた移動体100を所定の路面102上に各車輪7、8を各モータ5、6にて駆動させて移動する走行の制御を行う移動体100の走行制御装置10において、昇降台101の高さの位置情報と各モータのトルク特性情報と路面102の摩擦特性情報と移動体100の構造上の固有値とを用いて移動体の指令曲線、各モータのトルク制限のパラメータを算出する指令・トルク制限パラメータ算出手段1と、算出された指令曲線、トルク制限のパラメータに基づいて各モータ5、6への指令値、トルク制限値を生成する指令値・トルク制限値生成手段2とを備える。
(もっと読む)
1 - 9 / 9
[ Back to top ]