
Fターム[5H301KK12]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 集中監視制御装置(局)が複数あるもの (41) | 階層構造であるもの (15)
Fターム[5H301KK12]に分類される特許
1 - 15 / 15
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
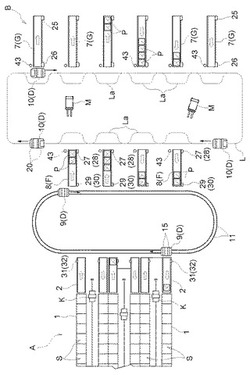
処理設備

【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
無人搬送車および走行制御方法
【課題】番地による移動場所の指定を用いつつ、座標系による走行が可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】レーザにより周辺環境の状況を計測して、地図データ122と計測により得られる計測データ121とをマッチングして、現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行する無人搬送車1であって、無人搬送車1が走行する走行エリアにおける所定の場所である番地と、走行エリアに設定されている座標との対応情報を格納しているデータメモリ120と、ホストコンピュータ2から移動の目標位置を番地で指定されると、番地および座標の対応情報を基に、指定された番地を座標に変換し、番地に対応する座標まで、経路データ123に従って無人搬送車1を走行させる処理部111と、を有することを特徴とする。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
搬送車システムと搬送車システムの管理方法
【課題】 搬送指令の発生から割付までの待時間を短くし、特に搬送指令が一時的に特定のエリアに集中しても、待時間が極端に長くならないようにする。
【構成】 搬送車システムでの、空の搬送車の数をエリア毎に管理し、搬送車がエリア間を移動するための移動時間を記憶し、今後所定時間内に発生する、エリア内の位置を起点とする搬送指令の数と、エリア内の位置を終点とする搬送指令の数とを、エリア毎に管理する。管理手段のデータから、所定時間内で、空の搬送車が不足する時刻と空の搬送車の不足数とを、エリア毎に算出し、管理手段のデータから、時刻よりも出発元のエリアから搬送車が不足するエリアまでの移動時間分前の時刻に、空の搬送車に少なくとも1台の余裕がある余裕エリアを探索し、余裕エリアの空搬送車に対して、実質的に移動時間分前の時刻に、搬送車が不足するエリアへの移動を開始させる。
(もっと読む)
搬送システムと搬送指令の転送方法
【課題】搬送車システムに異常がある場合の無駄な通信を減らし、かつ搬送要求を実行不能とするまでの処理を簡単化する。
【解決手段】上位コントローラに、走行ルートを構成する部分ルートの接続関係と、各部分ルートの走行の可否とを記憶するための記憶部とを設ける。記憶部のデータから、搬送要求を実行するために必要な部分ルートと部分ルートの走行の可否とを求めて、搬送要求の内で実行可能な搬送要求のみを下位コントローラへ送信する。
(もっと読む)
台車のモニタリングシステムとモニタリング方法
【構成】 複数の台車の位置を走行ルートのレイアウトと共にモニタに表示し、モニタ上で台車を指定し、指定された台車の出発位置と目的位置とをレイアウト上に表示する。
【効果】 台車の走行ルートが妥当かどうかを、容易に確認できる。
(もっと読む)
搬送車システム
【構成】 複数の搬送車が走行する走行ルートに沿ってロードポートを設け、コントローラから搬送車へ搬送指令を割り付けると共に、割付済みの搬送指令を他の搬送車に移し替える。搬送指令を他の搬送車に移し替える際に、荷すくいするロードポートに他の搬送車が停止可能か否かを判別し、停止可能な際にのみ搬送指令を移し替える。
【効果】 搬送指令を移し替えた搬送車が、搬送指令とは異なる方向に分岐することがなくなる。
(もっと読む)
搬送制御装置及び搬送システム
【課題】例えば半導体装置製造用の各種基板などの荷を搬送する搬送車に夫々備えられており、地図情報に従って当該搬送車を軌道上で如何に搬送させるかを決める搬送制御装置において、当該搬送車の停止時間をなるべく短くする。
【解決手段】搬送制御装置は、地図要素を含む基準地図データを格納する第1格納手段(5b)と、地図要素に対して修正が加えられる場合に、修正用地図データを受信する通信手段と、受信された修正用地図データを格納する第2格納手段(5a)と、所定のトリガーを受けて、格納されている修正用地図データを取り出して、取り出された修正用地図データで、格納されている基準地図データを置き換える更新手段(4)と、格納されている基準地図データに従って、軌道上で搬送車が如何に搬送するかを決め、決められた通りに搬送するように搬送車を制御する制御手段(4)とを備える。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
物品搬送システム
【課題】処理装置からの処理済み物品の引取、ならびに処理装置への未処理物品の支給を行う時間を極力短縮化することによって、半導体処理装置などの遊休時間を短縮し処理効率の向上を図った物品搬送システムを提供することである。
【解決手段】複数の搬送台車13、ストッカ14、走行路、及び処理済み物品引取制御手段と未処理物品支給制御手段とから構成される搬送台車制御手段26を備え、上記処理済み物品引取制御手段は、処理装置15から物品の処理が終了するまでの予測時間を受信する予測時間受信手段と、当該予測時間が所定時間に達したら、物品の搬送が可能な搬送台車13のうち、処理装置15に最も早く到着する一の搬送台車13を、キャリア20の引取を行う引取台車に指定する引取台車指定を行う引取台車選定手段とを有し、上記引取台車に、キャリア20の引取処理を指令することを特徴とする物品搬送システム。
(もっと読む)
搬送車システム
【課題】管理するコントローラが切り換わる直前であっても、搬送車に搬送指令を割り付けることができるシステムを提供する。
【解決手段】複数のエリア22・22・・・に区分された走行経路2と、前記走行経路2に沿って物品を搬送する搬送車10と、前記エリア22毎にエリア22内の搬送車10を通信を介して制御する搬送車コントローラ6(管理コントローラ60及びエリアコントローラ61)とを備えた搬送車システム1において、エリア22の境界23付近に搬送車10が位置する場合に、前記エリア22・22の境界23を挟んで設けられているエリアコントローラ61・61が、各々自らの管理するエリア22内に同一の強制割付指令を送信し(6−4)、強制割付指令を受信した搬送車10からの応答を受信したエリアコントローラ61以外のエリアコントローラ61の強制割付指令がキャンセルされる(6−7)。
(もっと読む)
搬送車システム
【課題】生産スケジュールに反映しにくい物品の搬送が発生しても、各エリアに適切な台数の搬送車を配置するようにして、物品の搬送効率を向上させた搬送車システムを提供することを目的とする。
【解決手段】物品を搬送する搬送車10と、搬送車10が乗り移り自在に複数の閉ループ軌道21・22が接続され、複数のベイ3・3・・・に区分された走行経路2とを備え、前記ベイ3毎に搬送車10の最小限必要な台数である設定台数Pが設定され、ベイ3内の搬送車10の台数が設定台数Pを下回ると他のベイ3から該ベイ3からへと搬送車10を移動させる搬送車システム1であって、前記各ベイ3で発生した搬送要求数Dが統合コントローラ7のRAM73に記憶され、前記搬送要求数Dと前記設定台数Pとの大小に基づいて必要設定台数Pxが決定され、この必要設定台数Pxに各ベイ3の設定台数Pが変更される。
(もっと読む)
搬送車システム
【構成】 搬送車コントローラ6bの管理エリア内の上流部の移載位置10bで、荷積みする搬送指令が発生する。これを割り付ける搬送車が無い場合、コントローラ6bは上流側のコントローラ6cに搬送指令を転送し、コントローラ6cは空きの搬送車8cがあれば、移載位置10bでの荷積みを割り付ける。
【効果】 搬送車コントローラ間の自律制御により、搬送指令を効率的に実行できる。
(もっと読む)
無人搬送車の充電制御方法
【課題】 無人搬送車10が充電器13から充電を行っている間に、無人搬送車11と無人搬送車10との間に充電器が無い場合、無人搬送車11は、無人搬送車10が充電を終わるまで待機することとなり、作業能力の低下を招いている。
【解決手段】 無人搬送車10の進行方向がSlで次の充電ポイントまでに1台も他の無人搬送車が無くまた次の充電ポイントの充電器14が充電中で無い場合に上位コンピュータ2は充電終了の指示を給電用コンピュータ3に指示し、終了の指示を受けた給電用コンピュータ3は充電器13に対し充電終了を指示する。充電終了の指示を受けた充電器13は無人搬送車10に対し充電終了の指示を発行し無人搬送車10は現在の充電を終了し、次の充電ポイント14に向かう。
(もっと読む)
1 - 15 / 15
[ Back to top ]