
Fターム[5H303AA26]の内容
Fターム[5H303AA26]の下位に属するFターム
Fターム[5H303AA26]に分類される特許
1 - 9 / 9
ステージ移動装置及び無接点充電器
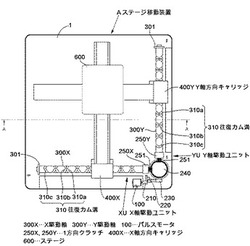
【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
線形運動デバイスの制御装置

【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
同期制御装置及び画像形成装置
【課題】像担持体と中間転写体との間の同期誤差を低減して、色ずれ等の画像不良の発生を低減する。
【解決手段】像担持体と中間転写体とを同期制御する際、同期補償器44は像担持体の検出位置と中間転写体の検出位置との間の同期誤差に応じて像担持体及び中間転写体を駆動する際の第1及び第2のトルク補償量を求める。ドラム位置制御器42は像担持体の検出位置とその目標位置との偏差である第1の位置偏差に応じて第1のフィードバック量を生成する。ベルト位置制御器43は中間転写体の検出位置とその目標位置との偏差である第2の位置偏差に応じて第2のフィードバック量を生成する。加算器51は第1のトルク補償量と第1のフィードバック量とに応じて像担持体を駆動制御する。減算器50は第2のトルク補償量と第2のフィードバック量とに応じて中間転写体を駆動制御する。
(もっと読む)
プロジェクターおよびその制御方法
【課題】 迅速にかつ正確な位置制御を行うことのできるプロジェクターを提供する。
【解決手段】 制御部2により、フラッシュROM11に保存されたレンズユニット5の目標位置とエンコーダー10によるレンズユニット5の現在の位置との偏差が一定値以上ある場合に、現在の位置と目標位置とが一致するまでフィードフォワード制御により駆動モーター6の駆動を行うとともに、フィードフォワード制御による駆動停止位置と目標位置との偏差に基づいて制御可能な最小移動量の単位で駆動モーター6の駆動制御を行う。
(もっと読む)
平面モータ
【課題】誤差の少ない高精度な位置検出が可能な平面モータを実現する。
【解決手段】プラテン上に配置されたスライダをX軸方向及びY軸方向に位置制御する平面モータにおいて、
前記スライダにレーザ光源、レンズおよびイメージセンサを搭載し、前記レーザ光源から出射したレーザ光を前記プラテンで反射させ前記レンズを介して前記イメージセンサで受光するように構成した。
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度の誤検出を防止した「回転検出装置」を提供する。
【解決手段】回転検出装置100は、回転体であるモニタの回転に応じて所定の回転軸を中心に回転し、主面を放射状に等分割して第1の反射率の面と第2の反射率の面とを交互に配置した反射板108と、当該反射板108の主面に向けて交互に光を照射するとともに反射板108の主面で反射した光を検出するフォトリフレクタA104及びフォトリフレクタB106と、フォトリフレクタA104により光が照射されているタイミングで当該フォトリフレクタA104により検出された光の光量と、フォトリフレクタB106により光が照射されているタイミングで当該フォトリフレクタB106により検出された光の光量とを取得し、これらの光量に基づいて、ディスプレイの回転角度を検出するマイクロコンピュータ102とを有する。
(もっと読む)
シャフトレス輪転印刷機における同期制御装置および同期起動方法
【課題】輪転印刷機を停止状態から速やかに起動させ、起動時に機械の振動、ギヤ鳴り、及び連続紙の破断や弛みの発生を解消して速やかに同期制御に移行させること。
【解決手段】輪転印刷機の同期制御システムにおいて、集中制御装置01にバーチャル回転指令発生装置0101を、印刷機、折り機の同期駆動装置に位相指令検出装置0601、位相FB検出装置0602、0603を設置する。また、折り機に周期的な負荷変動の影響を抑止する回転補償器を設置する。そして始めは徐動速度にて滑らかに運転し、安定となった徐動運転中に折り機の位相FB検出装置0603の出力をバーチャル回転指令発生装置0101にプリセットした後、各印刷機と折り機の位相制御をオンとする。これにより、折り機は原点合わせ動作を必要とせず同期制御へ移行し、各印刷機は原点合わせゲインGzを用いて滑らかに原点合わせを行った後同期制御へ移行する。
(もっと読む)
閉ループ制御のチューニングの自動化
本発明は閉ループシステムのためのフィルタとループ比例ゲインを同時選択するための新規な装置、方法およびシステムに関するものである。本発明の1つの典型的な実施形態によれば、速度ループ補償器として知られるコントローラの一部を自動的に選択する方法が提供される。この方法は速度制御(例えばモータエンコーダ角)のフィードバックに使用されるセンサへの作動力(例えばモータトルク)からのダイナミック応答を表す周波数応答関数(FRF)に作用する。この周波数応答関数はそれぞれ対応する周波数値をもつ複素数の列として表すことができる。このチューニング方法は、安定余裕に関して規定された一連の基準を満たしつつループ比例ゲイン(Kp)の最大化を可能にするフィルタパラメータの組み合わせを決定する。積分ゲインと参照モデルを選択する方法も提示される。 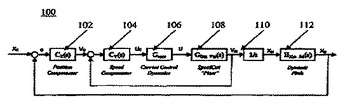 (もっと読む)
(もっと読む)
電子機器及びモータの制御方法
【課題】 タイマ割り込みを用いてモータの駆動を制御する電子機器において、割り込み処理が遅延された場合における制御の精度低下を抑制する。
【解決手段】 所定間隔で発生するタイマ割り込み信号に応じて実行されるモータの駆動処理が、他の割り込み信号に対応する処理の実行によって遅延された場合においても、割り込み信号が発生されてから駆動処理が実行されるまでの遅延時間を算出し(S502)、補正位置情報を算出して位置情報が更新され(S505)、フィードバック制御が行われる。
(もっと読む)
1 - 9 / 9
[ Back to top ]