
Fターム[5H303DD02]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | 電動機 (562) | 誘導電動機 (8)
Fターム[5H303DD02]に分類される特許
1 - 8 / 8
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
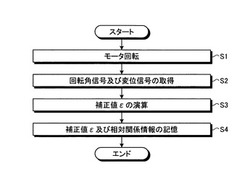
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
シフト装置

【課題】平面上の任意の位置にスライド操作可能な操作部に対しフォースフィードバック制御を行うことで、汎用性の高い二次元スライド操作タイプのシフト装置を提供する。
【解決手段】シフト装置1は、XY平面上の任意の位置へスライド操作可能なスライド操作部20と、スライド操作部の操作状態を検出するX軸及びY軸リニアエンコーダ161,162と、スライド操作部に力を付与するX軸及びY軸ボイスコイルモータ14,15とを備える。力覚制御部は、予め定められたシフトチェンジ操作の軌道である操作許容エリアの外縁部に「反力の壁」を生じさせるフォースフィードバック制御を行うことにより、軌道を逸脱するような異常なスライド操作を防止する。
(もっと読む)
ビルトインテスト回路を内蔵したジンバル制御システム
【課題】本発明は、ジンバル制御システムにビルトインテスト回路を設け、このビルトインテスト回路によって励磁信号の有無を検出し、異常時のジンバルの損傷を防止することを目的とする。
【解決手段】本発明によるビルトインテスト回路を内蔵したジンバル制御システムは、ジンバル制御システム(2)にビルトインテスト回路(18)が内蔵され、このビルトインテスト回路(18)により、レゾルバリファレンス出力回路(13)からの励磁信号(14)の有無を検出し、この励磁信号(14)が停止した状態で三相ブラシレスモータ(7)への駆動信号(6)を停止し、ジンバルのストッパへの可動子の衝突を防止し、ジンバルの損傷防止を行う構成である。
(もっと読む)
ジンバル装置
【課題】従来のジンバル装置は、パルス状のPWM制御信号によってモータの駆動制御を行うので、PWM制御信号を生成する際に大きなスイッチングノイズが発生してしまい、ペイロードの出力に前記スイッチングノイズが乗ってしまう。
【解決手段】本発明によるジンバル装置は、現在角と指令角との差に応じた電圧の三角関数波形であるアナログ駆動信号11aをアナログ制御モジュール11が生成し、このアナログ駆動信号11aによってモータ1の駆動制御を行う構成である。
(もっと読む)
パワーアシストロボット
【課題】操作者の操作力を増幅して操作者の作業をアシストするパワーアシストロボットの利便性を向上させる。
【解決手段】パワーアシストロボット10は、駆動源11と、操作者によって操作される操作部12と、対象物に力を与える作業部13と、操作部12に入力された操作力を増幅し、増幅した力を駆動源11を介して作業部13に供給する増幅部14と、作業部13が操作部12の操作に追従するように制御を行う制御部16と、作業部13が操作部12の操作に追従しているか否かを表す状態であるパワーアシスト状態を判断するパワーアシスト状態判断部17と、パワーアシスト状態が不安定であるときに操作者等に対して所定の提示を行う状態提示部20と、を備えている。
(もっと読む)
サーボ制御装置およびこの制御装置の電流検出方法
【課題】本発明は、停止時の電流検出の分解能を上げるとともに、停止時の振動を抑えることができる方法を提供することを目的とする。
【解決手段】ΔΣ方式のA/D変換器による電流検出手段を備えたサーボ制御装置の電流検出方法において、前記サーボ制御装置は、フィルタ10のフィルタリング時間が切替えられる切換手段11を備えたものである。
(もっと読む)
サーボ機構の速度制御装置
【課題】オーバーシュートのない速い応答になり、モータ発生トルクが大きくならず速度制御系の安定度を高めるサーボ機構の速度制御装置を提供する。
【解決手段】2慣性系を有して、モータ速度をフィードバックし、負荷機械の速度の比例制御を行う比例ゲインを備えたサーボ機構の速度制御装置において、時間[0 T]において、初期値0,最終値1となる関数X(t)=t/T 但し、t:時間、Tは補償を完了する時間、の関数値を発生させ、
y(t)=x(t)×(JL/JM)
z(t)=y(t)+1 、とし、速度比例制御器kvの出力とz(t)(37の出力)とを乗算することにより負荷イナーシャの補償を行うものである。
(もっと読む)
制御装置
【課題】 機械の経年変化による強度低下により保守必要性や、動作異常等を検出する制御装置を得る。
【解決手段】 サーボモータで駆動される被駆動体に加速度検出手段と取り付ける。サーボモータの位置、速度のフィードバック制御を行う軸制御回路のプロセッサは、位置、速度制御処理周期毎、位置、速度フィードバック制御処理を行い電流指令を求め電流ループ処理に出力する(a1〜a6)。また、加速度検出手段より加速度検出値αfを読み取り(a7)、該加速度検出値αfがスレショルド値αs以上のとき(a8)、異常信号を出力し、アラーム表示、機械動作停止等を行う。被駆動体の加速度を加速度検出手段で直接検出するから、機械が古くなり振動が多くなったとき、被駆動体が他の物と衝突したとき、部品の破損等の機械異常が発生したときなど、異常を確実に検出できる。
(もっと読む)
1 - 8 / 8
[ Back to top ]