
Fターム[5H303DD17]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | その他のアクチュエータ (11)
Fターム[5H303DD17]に分類される特許
1 - 11 / 11
ステージ機構およびその駆動方法
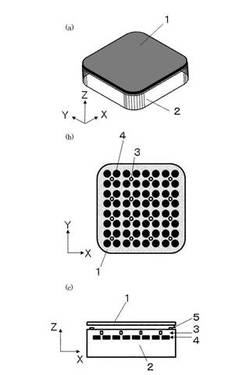
【課題】ステージを搭載する固定ベース表面に組み込んだマイクロヒータアレイで構成されるコンパクトなアクチュエータシステムで、XY方向、ヨー回転方向の3自由度に関する長ストローク駆動、およびZ/ピッチ/ロール方向の微細駆動を実現することができるステージ機構およびその駆動方法を提供する。
【解決手段】ステージ1に接触するベース2の表面近傍に、ベース2の表面の熱変形突出用の第一層目のヒータ3をXY方向にアレイ状に複数配置し、更にベース2の表面から深いところに、第一層目のヒータ3の前後左右を挟み込むように第二層目のヒータ4をXY方向にアレイ状に複数配置する。第二層目のヒータ4が、第一層目のヒータ3による熱変形突出部をXY方向に移動することにより、熱変形突出部に接触するステージ1をXYθ方向に駆動する。
(もっと読む)
集中型太陽光発電及び熱システム

集中型太陽光発電及び熱システムが開示される。システムは、このような高い集光レベルを欠如する構成よりも少数の太陽光発電レシーバーを必要とする効率的なエネルギー変換を生じる高い集中型太陽光エネルギーを生じる太陽光発電レシーバーアッセンブリを妥協する。太陽光発電レシーバーアッセンブリは、光源の光を電磁エネルギーレシーバー上に集光する主要な光学要素と、光源のさらなる集光を助ける二次的な光学要素と、熱エネルギーコンバーターと、放熱ユニットとを備える。太陽光発電レシーバーアッセンブリは、好ましくは、太陽の露呈を最大限にするために追従システムに取り付けられる。 (もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ
【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
位置決め制御システム
【課題】従来のビルの清掃作業手法に比べ、清掃用ゴンドラを上下駆動できる装置を簡単に設置することができ、しかも、作業が終了すれば簡単に撤去することができ、さらに、清掃用作業員が効率的に清掃作業を行うことができ、そして、安全で、安価に提供できる位置決め制御システムを提供することを目的としている。
【解決手段】位置決め制御システムは、夫々モータ3で回転駆動される複数のプーリー6と、該各プーリー6に夫々巻回されてなる索体7と、該各プーリー6に巻回されてなる少なくとも2本の索体7を使用して上方向に支持されてなる作業装置12と、前記各モータ3の回転駆動を夫々制御するモータ制御装置2と、前記各モータ制御装置2に前記モータ3の回転駆動量を指令する制御装置1とからなるものとしている。
(もっと読む)
移動体のサーボ制御装置及びレーザ加工装置
【課題】補償効果に優れる移動体のサーボ制御装置およびレーザ加工装置を提供することおよび付加入力の演算に語長制限がある場合でも十分な補償効果を持たせる。
【解決手段】フィードバック・ループを備え、移動体を位置指令データに基づいて位置決めする移動体のディジタルサーボ制御装置において、位置指令データを受けた時刻におけるフィードバック・ループの状態量に関する伝達関数に対して、フィードバック・ループに固有の極を相殺するような零点を付加するディジタル・フィルタ10a、10b(付加入力手段)を設け、位置指令データに加えてディジタル・フィルタ10a、10bの出力をフィードバック・ループに入力して前記移動体を位置決めする。また、ディジタル・フィルタを縦続型構造とし、この構造を構成する伝達関数が複素平面上で接近した極と零点を持つようにして、演算に語長制限がある場合でも十分な補償効果を得る。
(もっと読む)
操作装置
【課題】操作子に適度な操作反力を再現する汎用性の高い技術を提供する。
【解決手段】 操作装置は、人が操作する操作子と、人が操作子に加えている操作力を検出する操作力検出手段と、操作子の速度を検出する手段と、検出した操作子の速度に検出した操作力に起因して生じる加速度から計算する速度変化量を加味して第1速度を算出する手段と、第1速度と反対向きの力を決定する手段と、第1速度に決定した反対力に起因して生じる加速度から計算する速度変化量を加味して第2速度を算出し、算出した第2速度が第1速度と反対向きであれば、算出した第2速度をゼロとする手段と、操作子の速度が第2速度算出手段で算出した第2速度に変化するように、操作子を動作させるアクチュエータとを備える。
(もっと読む)
微小位置決め装置
【課題】真空雰囲気の劣化を防止しかつ位置決め精度が良好な微小位置決め装置を提供する。
【解決手段】位置決め対象部4と、位置決め対象部4を変位可能に支持する基部2,3と、位置決め対象部4と基部2,3との間に設けられ、温度変化に応じて伸縮する熱伸縮部10と、熱伸縮部10を加熱又は冷却する温度調節部11とを備える微小位置決め装置とし、熱伸縮部10を加熱又は伸縮したときの熱膨張又は熱収縮によって位置決めを行なう。
(もっと読む)
弾性体アクチュエータ駆動型可動機構の制御装置及び制御方法
【課題】 弾性体アクチュエータで駆動される可動機構を応答性良くかつ位置決め精度良く制御できる弾性体アクチュエータ駆動型可動機構の制御装置及び方法を提供する。
【解決手段】 流体圧駆動アクチュエータ1の内部圧力を圧力計測手段9で計測し、流体圧駆動アクチュエータにより発生する駆動トルクをトルクセンサー7で計測し、可動機構の変位量を計測し、変位の目標値と計測値とが入力されて位置誤差を位置誤差補償手段12で補償し、位置誤差補償手段の出力と駆動トルクの計測値とが入力されて駆動トルク誤差を駆動トルク誤差補償手段25で補償し、駆動トルク誤差補償手段の出力と圧力差の計測値とが入力され圧力差誤差を圧力差誤差補償手段15で補償する。
(もっと読む)
位置制御装置
【課題】 軸受け内でのガタの発生を抑制することで、移動部材の位置精度を向上させることができる位置制御装置を提供する。
【解決手段】 駆動源(10)からの駆動力を受けて回転する軸部材(3)と、軸部材を回転可能に支持する第1の軸受け(6)と、軸部材の回転に応じて軸部材の長手方向に移動可能な移動部材(1)とを有する。第1の軸受けは、軸部材に固定された第1の部材(6b)と、第1の部材に対して転動体(6c)を挟んで配置された第2の部材(6a)とを有する。第1および第2の部材を転動体に加圧接触させる力を、軸部材を介して第1の部材に作用させる加圧手段(8)を有する。
(もっと読む)
1 - 11 / 11
[ Back to top ]