
Fターム[5H501GG02]の内容
電動機の制御一般 (20,975) | 制御系 (2,202) | 位置フィードバックするもの (546) | 負荷検出値をフィードバックするもの (74)
Fターム[5H501GG02]に分類される特許
1 - 20 / 74
モータ制御装置及びモータ制御方法
電動機の巻線過熱防止装置および電動機の制御装置
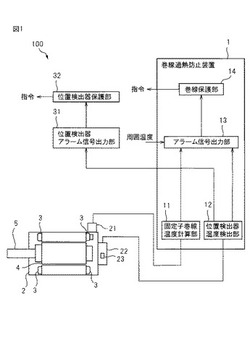
【課題】電動機の固定子巻線の過熱を防止し電動機を効率よく駆動させる低コストの巻線過熱防止装置および電動機の制御装置を実現する。
【解決手段】電動機2の制御装置100内に設けられる巻線過熱防止装置1は、電動機2の固定子巻線3に流れる電流から推定される固定子巻線3の温度変化量と電動機2の周囲温度とに基づき巻線温度を計算する固定子巻線温度計算部11と、電動機2の回転子4の位置情報を検出する位置検出器22内の温度検出素子23が示す温度を検出する位置検出器温度検出部12と、巻線温度がアラームレベルを超えたときアラーム信号を出力するアラーム信号出力部13であって、アラームレベルは、周囲温度が所定の温度以下の場合には温度変化量の最大値と周囲温度とに基づき規定された温度であり、周囲温度が所定の温度より高い場合には位置検出器22を過熱から保護するための温度であるアラーム信号出力部13とを備える。
(もっと読む)
駆動装置

【課題】ロータの回転を機械的に停止させて基準位置を求める突当学習時の突当トルクの精度を高める。
【解決手段】通電開始時にロータが回転する状態で電動モータを通電して励磁相の飽和電流値を検出し、検出した飽和電流値に応じて突当学習の実行時のデューティ比を算出して、突当学習を実施する際における電動モータの出力を「予め設定した目標トルク」に低減させる。これにより、諸条件により電動モータの電流の流れ易さが変化しても、突当トルクを目標トルクにコントロールすることができ、突当トルクの精度を高めることができる。突当トルクが与えられる電動アクチュエータの出力系や、パーキング切替機構のディテント機構等の機械的な負担の変動を抑えることができ、シフトバイワイヤ(パーキングバイワイヤ)の耐久性を高めることができる。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、主軸の近傍に設けられたセンサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用いて電流指令値を算出し、モータ負荷の値が所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
制御弁の制御装置
【課題】電動アクチュエータから制御弁に付与される駆動力が微小変動するような状況を少なくし、電動アクチュエータの構成部品の磨耗や劣化の進行を抑制する。
【解決手段】電動アクチュエータ12によって駆動される制御弁10は所定の開度に付勢されている。その開度を制御する制御ユニット21は、制御弁10の目標開度と検出された開度との偏差に応じてアクチュエータ12を操作する。該偏差の絶対値が所定値よりも小さいという条件を少なくとも含む所定の必要条件が成立している場合に、アクチュエータ11への電源供給を遮断し、目標開度又は検出された開度と上記所定の開度との偏差の絶対値が所定値以上である場合には、アクチュエータ11の電源供給を継続する。
(もっと読む)
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
モータに供給する電流の時系列データを生成するプログラム、方法、装置及びレーザ加工装置
【課題】モータに印加される電圧を飽和させない電流の時系列データを得るのに有利な技術を提供する。
【解決手段】対象物を移動させるモータを含む制御系を第1状態から第2状態へ遷移させるために前記モータに供給する電流の時系列データをコンピュータに生成させるプログラムであって、前記コンピュータに、前記時系列データにより前記モータに印加される電圧の絶対値の最大値を制約する条件を含む制約条件を設定させ、前記時系列データを評価するための評価関数を設定させ、前記制約条件を満たすように、且つ、前記評価関数の値が所定の条件を満たすように、前記時系列データを求めさせる、ことを特徴とするプログラムを提供する。
(もっと読む)
電動シリンダの制御方法及び電動シリンダの制御システム
【課題】 電動シリンダのロッドと被加圧部材が予期しない衝突を起こすことで生じるオーバーロードにより、電動シリンダやロッドに連結された荷重検出器が破損することを防ぐことができる電動シリンダの制御方法及び制御システムを実現する。
【解決手段】サーボコントローラ17は、荷重検出器13によって検出された加圧荷重Pmが衝突検知荷重Pc以上であるか否かを判定し、加圧荷重Pmが衝突検知荷重Pc以上であると判定した場合に、更に、衝突時停止フラグがONであるか否か、ロッド11の駆動速度Smが衝突許可速度Sc以上であるか否か、を判定し、衝突時停止フラグがONである、または、駆動速度Smが衝突許可速度Sc以上であると判定した場合に、サーボアンプ16に逆方向位置指令パルス信号を出力し、サーボアンプ16に蓄積されている溜りパルスを強制的に減少させてロッド11を停止させる。
(もっと読む)
駆動制御装置
【課題】アクチュエータで駆動する可動部が非線形系を持つ装置に対してセミクローズドループ制御とフルクローズドループ制御を滑らかに切換えて機械端の位置を高精度に制御する駆動制御装置を得る。
【解決手段】サーボアンプ(駆動制御装置)3は、モータ4の回転位置を検出するモータ端センサ2を含み、モータ4をセミクローズドループ制御するセミクローズドループ制御手段と、非線形の経路を移動する移動体9の位置を検出する機械端センサ8を含み、移動体9の位置に基づいてモータ4をフルクローズドループ制御するフルクローズドループ制御手段と、セミクローズド速度指令とフルクローズド速度指令のいずれかに切り換える切換スイッチ30と、切換スイッチ30の後段に設けられ速度指令を所定の大きさ以下に制限して制御切り換え時の速度指令の変動を吸収する速度リミッタ31とを備えている。
(もっと読む)
モータを備える機器
【課題】 移動体を移動させるタイミングベルトの伸びの変化があっても、モータのコギングの影響を抑制する。
【解決手段】 移動体と、モータと、モータを駆動する駆動手段と、エンコーダとを備える電子機器であって、前記モータが接続されたモータプーリと、従動プーリと、タイミングベルトを備え、前記移動体を走査する走査手段と、前記エンコーダから出力された信号に基づく位置と速度の情報に基づき駆動指令に従って第1制御信号の生成を行うとともに、前記モータのコギング周期と前記位置の情報に基づく周期的な第2制御信号の生成を行い、前記第1及び第2制御信号を前記駆動手段へ出力する信号生成手段とを備え、前記移動体の第1走査位置に対応する前記第2制御信号の周期は、従動プーリ前記第1走査位置より前記従動プーリに相対的に近い第2走査位置に対応する前記第2制御信号の周期と異なる。
(もっと読む)
モータ制御装置
【課題】使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、モータの発熱(温度上昇)を抑えて、モータの寿命低下や故障を未然に防止できるようにする。
【解決手段】電源投入後の初期駆動時に、モータ12の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ46の出力信号のエッジをカウントし、初期駆動終了時のエンコーダカウント値とロータの回転位置と通電相との対応関係を学習し、その後の通常駆動時に、エンコーダカウント値と初期駆動終了時の学習結果に基づいて通電相を決定する。初期駆動終了後は所定の禁止期間が経過するまで初期駆動の実行を禁止し、使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、初期駆動が繰り返し実行されることを未然に防止する。初期駆動終了後、禁止期間内に電源切断操作が行われても、メインリレー51を切断せずにレンジ切換制御装置42への電源供給を継続する。
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
サーボモータ駆動減速装置の温度予測方法及び装置
【課題】サーボモータ駆動減速装置の減速装置部の温度上昇を温度検出器で直接検知することなく、部品点数を増加させることなく、安価に予測する。
【解決手段】サーボモータ駆動減速装置20のサーボモータ5を駆動するサーボアンプ及び制御装置へフィードバックされる電流値Iiと、回転角θmと、を読み込み、電流値と回転角とから減速装置部7の発熱量を算出し、温度上昇予測を行う。減速装置部の入力トルクTiと入力回転数Nとから一義的に温度上昇値が求められるようにした演算式又はデータテーブルを予め定め、電流値の出力トルク換算値を入力トルクとし、回転角を換算して得られる回転数を入力回転数として温度上昇予測を行う。さらに、入力トルクを1サイクルあたりの平均入力トルクとし、回転数を1サイクルあたりの平均回転数として、減速装置部の温度上昇予測を行う。
(もっと読む)
位置決め装置の同期防振制御装置
【課題】モータ軸と負荷間をボールねじやタイミングベルト等の負荷位置によりバネ定数が大きく変化する機構で接続した位置決め装置に負荷側外乱オブザーバを適用した場合においても、バネ定数の変化の影響を受けない精度の高い負荷側外乱の推定を可能とし、外乱に対する高いロバスト性を持たせて、振動抑制と同期制御を実現可能する。
【解決手段】モータ軸と負荷間を弾性体で接続した、負荷位置によりバネ定数Kfが大きく変化する位置決め装置において、負荷側の軸ねじれ角を測定し、軸ねじれ角と負荷の加速度に基づいて構成した負荷側外乱オブザーバ40にて推定した負荷側の外乱を、負荷側外乱から位置指令値までの逆システム50を通してフィードバックする際に、負荷側外乱オブザーバ内のバネ定数ノミナル値Kfnを負荷位置により変える。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
負荷駆動装置
【課題】停電に対するバックアップ機能を、低コストでエネルギ効率良く実現した簡易な構成の負荷駆動装置を提供する。
【解決手段】コンバータから得られる直流電力にてモータを駆動すると共に、モータに生起された回生電力を回収するインバータと、コンバータからの直流電力または前記インバータにて回収された回生電力を蓄積すると共に、蓄積した電力を前記インバータに出力するコンデンサ(電気二重層キャパシタ)とを備え、特にコンデンサに蓄積された電力量が一定となるように前記コンバータの作動を制御すると共に、コンデンサに蓄積された電力量が低下したときには非常用発電機を起動する電力制御装置を備える。
(もっと読む)
サーボモータ装置の較正方法およびサーボモータ装置
【課題】 模型用ラジオコントロール装置の被制御体に搭載されるサーボモータ装置において、サーボモータ装置の出力軸の回転角度とポテンショメータの抵抗値に応じて形成される出力信号の出力値の関係を較正して、精度よく駆動するサーボモータ装置を提供する。
【解決手段】 ブラシレスモータの持つセンサの情報を利用して、モータの回転の位置をカウンタによって表す。カウンタの値から求められるサーボモータ装置の出力軸の回転角度と、このときのポテンショメータからの出力信号の出力値を対応付けて複数記録し、データテーブルを作成する。サーボモータ装置を使用するときには、出力信号からデータテーブルを用いて出力軸の回転角度を求め、この回転角度を利用した駆動制御を行う。
(もっと読む)
電動機の制御装置
【課題】本発明の目的は、内燃機関の爆発がある状態及びない状態に関わらず、クランク軸のトルク脈動成分によって発生する駆動軸の振動を低減させることができる電動機の制御装置を提供することにある。
【解決手段】本発明は、エンジン10のクランク軸12のトルク脈動成分によって、車両の駆動軸18に発生する振動を低減するように電動機を制御する電動機の制御装置であって、クランク軸12のトルクを求めるクランク軸トルク推定部42と、クランク軸12のトルクからトルク脈動成分を抽出するトルク脈動成分算出部44と、トルク脈動成分及び駆動源から駆動軸へのトルク伝達関数に基づいて、駆動軸18のトルクからトルク脈動成分を除去する補償トルクを算出する補償トルク算出部46と、電動機のトルク指令値から補償トルクを減じ、電動機のトルク指令値を補正するトルク補正部48と、を備える。
(もっと読む)
1 - 20 / 74
[ Back to top ]