
Fターム[5H501HA08]の内容
電動機の制御一般 (20,975) | 駆動制御回路又は電力変換回路の主要な構成 (749) | 半導体素子 (598) | トランジスタ (476) | FET (175)
Fターム[5H501HA08]に分類される特許
1 - 20 / 175
電動パワーステアリング装置
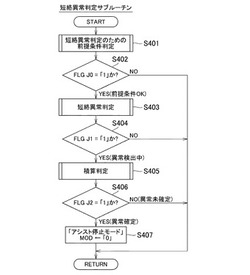
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
駆動装置

【課題】ロータの回転を機械的に停止させて基準位置を求める突当学習時の突当トルクの精度を高める。
【解決手段】通電開始時にロータが回転する状態で電動モータを通電して励磁相の飽和電流値を検出し、検出した飽和電流値に応じて突当学習の実行時のデューティ比を算出して、突当学習を実施する際における電動モータの出力を「予め設定した目標トルク」に低減させる。これにより、諸条件により電動モータの電流の流れ易さが変化しても、突当トルクを目標トルクにコントロールすることができ、突当トルクの精度を高めることができる。突当トルクが与えられる電動アクチュエータの出力系や、パーキング切替機構のディテント機構等の機械的な負担の変動を抑えることができ、シフトバイワイヤ(パーキングバイワイヤ)の耐久性を高めることができる。
(もっと読む)
負荷駆動装置
【課題】負荷電流検出手段により検出された負荷電流を用いてリーク故障を確実に検出する。
【解決手段】駆動回路33a、33bの出力端子Ta2、Tb2から電源線6に至る還流経路内にシャント抵抗9a、9bを接続し、電源線5と給電分岐点Nsとの間に共通のシャント抵抗24を接続する。駆動制御回路32は、MOSFET7a、7bをPWM駆動し、負荷電流検出回路12a、12bから負荷電流Ia、Ibを入力し、総電流検出回路23から総電流Isを入力する。検出負荷電流Ia、Ibに対しそれぞれ対応するPWM駆動信号のオフ駆動期間をマスク処理し、マスク処理した検出負荷電流Iam、Ibmを加算した加算電流Icmと検出総電流Isとを比較する。両者が等しい場合には正常状態と判定し、異なる場合にはショート故障またはリーク故障が生じたと判定する。
(もっと読む)
負荷駆動装置
【課題】駆動電流を制御するスイッチ素子をより高い周波数で動作させることができ、且つ駆動電流の異常をより正確且つ安定的に検出することが可能な負荷駆動装置を提供する。
【解決手段】負荷駆動装置1は、スイッチ素子T1に対してオン信号を周期的に出力し、且つ各周期におけるオン信号の出力期間の長さを所定の変動範囲内で変更するように制御を行う信号制御回路と、通電路における駆動電流の状態を検出する検出回路と、検出回路によって検出される駆動電流の状態に基づいて異常判定を行う異常判定回路と、異常判定回路によって異常と判定されることを条件として駆動電流を抑制する保護動作を行う保護回路とを備えている。そして、異常判定回路は、信号制御回路により、オン信号の出力期間の長さが変動範囲における最小長さよりも長い所定長さに設定されるときに、検出回路の検出結果に基づいて異常判定を行っている。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
スイッチトリラクタンスモータの制御装置
【課題】巻線に流す電流の制御タイミングを最適に調整すること。
【解決手段】中性点で相互に接続された複数の相の巻線を有し、各相から中性点に向かう電流または中性点から各相へ向かう電流をロータの回転位置に応じて供給することで動作するスイッチトリラクタンスモータの制御装置において、ロータの回転に応じて順次制御対象となる相を、通電する相としての通電相または通電しない相としての非通電相のいずれかに設定する設定手段(通電相マップ23)と、ロータの回転に応じて制御対象となる相が通電相に設定されている場合には、当該相に対して通電する通電手段(駆動信号生成部30)と、通電手段によって通電する相の前後の相の通電相/非通電相の組み合わせによって、当該相の巻線に流す電流の制御のタイミングを調整する調整手段(転流信号生成部29)と、を有する。
(もっと読む)
回転機の制御装置
【課題】ブートストラップ回路を用いたシステムにおいて、モデル予測制御を適用する場合、高電位側のドライブユニットの電源となるコンデンサの電圧が低下することで、高電位側のスイッチング素子を適切に駆動することができなくなることを防止する。
【解決手段】制御装置20は、モデル予測制御によって、インバータINVの8通りの操作状態のうち、制御量とその指令値との差を最小とする操作状態を選択し、これに基づき、インバータINVを操作する。ただし、コンデンサCu,Cv,Cwの中に電圧が過度に低下するものがある場合、強制的にスイッチング素子Sun、Svn,Swnをオン状態とする。
(もっと読む)
電動アクチュエータの駆動制御装置
【課題】駆動制御装置の上下方向の高さを十分に低くして、装置全体の小型化とレイアウトの自由度を向上し得る。
【解決手段】電動パワーステアリング装置の電動モータを駆動制御する駆動制御装置であって、電動モータに電力を供給するパワー電子回路と、通電時の電磁ノイズを除去するフィルタ電子回路とを、樹脂材によってモールドされたバスバー組立体13に一体に形成すると共に、該バスバー組立体に対して、電動モータの駆動を制御する制御回路を構成する制御基板14を重合配置し、バスバー組立体の下面に配置された6つの半導体スイッチ素子21を、放熱部材である板状のハウジング本体3の膨出部5との間に2枚の放熱シート9を介して挟持状態に保持した。
(もっと読む)
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
電流制御装置
【課題】モータ回転速度センサを不要とし、適用範囲の広い故障検出が可能な電流制御装置を提供することにある。
【解決手段】電流制御用半導体素子1は、同一半導体チップ上に、負荷を駆動するトランジスタ4と、負荷の電流を検出する電流検出回路7と、電流指示値と電流検出回路が出力する電流値より、トランジスタのオンDutyを演算する補償器8と、オンDutyに基づいてトランジスタをオンするパルスを生成するPWMタイマ12とを有する。マイクロコントローラ6は、電流制御用半導体素子1に電流指令値を送信するとともに、電流制御用半導体素子1から、電流検出回路7が出力する電流値と、補償器8が出力するオンDutyを受信し、受信した電流値とオンDutyから電流制御用半導体素子1の故障を検出する。
(もっと読む)
故障情報伝達装置
【課題】簡素な構成で複数の故障情報を適切に伝達することができる故障情報伝達装置を提供する。
【解決手段】制御回路126は、1つの信号ライン126bを介して複数の故障情報をそれぞれ異なるパルス信号として送信する。具体的には、複数の故障情報をそれぞれ周波数の異なるパルス信号として送信する。そして、マイクロコンピュータ127は、1つの信号ライン126bを介して制御回路126の送信したパルス信号を受信し、受信したパルス信号に基づいて故障情報を特定する。しかも、制御回路126は、複数の故障が同時に発生した場合、伝達の優先度が高い故障情報を優先して送信する。そのため、簡素な構成で複数の故障情報を適切に伝達することができる。
(もっと読む)
電気機械装置、移動体、及びロボット
【課題】ラジアルギャップ型の電気機械装置を効率よく駆動する。
【解決手段】回転軸230を中心として回転するラジアルギャップ型の電気機械装置10であって、個々の永久磁石200の磁化の方向が回転軸230を中心とする放射または中心方向であり、回転軸230を中心とする円周に沿って並べられた複数の永久磁石200と、複数の永久磁石200と対向すると共に、永久磁石200の外側の第1の円筒面に沿って並べられた第1相用(A相)の複数の第1の電磁コイル100Aと、複数の永久磁石200と対向すると共に、第1の電磁コイル100Aの第1の円筒面よりも外側の第2の円筒面に沿って並べられた第2相用(B相)の複数の第2の電磁コイル100Bと、を備え、第1と第2の電磁コイルは、それぞれの誘起電圧が同じ値になり、かつ、それぞれの巻線抵抗が同じ値となるように構成されていることを特徴とする電気機械装置。
(もっと読む)
電動ポンプ装置
【課題】起動してから素早く必要な油圧を発生させることができるとともに、安定して油圧を供給することのできる電動ポンプ装置を提供する。
【解決手段】マイコン22は、モータ13の回転状態を維持することにより必要な油圧が変速機構に供給される安定状態であるか否かを判定し、安定状態である場合に電流フィードバック制御のゲインKを、起動状態で設定される高応答ゲインよりも小さな低応答ゲインに変更するPIゲイン設定部51を備えた。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
電子装置
【課題】スイッチング素子をオンするために、スイッチング素子の制御端子に定電流を供給して電荷を充電するオン駆動用定電流回路の異常を検出できる電子装置を提供する。
【解決手段】制御装置12は、オン駆動用定電流回路121と、オフ駆動用回路122と、制御回路128とを備えている。オン駆動用定電流回路121は、電流制御用FET121aと、電流検出用抵抗121bとを有している。制御回路128は、電流検出用抵抗121bの電圧に基づいて電流制御用FET121aを制御し、IGBT110dのゲートに定電流を流し込み、IGBT110dをオンする。オン駆動用定電流回路121の電流制御用FET121aや電流検出用抵抗121bが故障すると、それらに流れる電流や、それらに印加される電圧が変化する。そのため、電流検出用抵抗121bの電圧に基づいてオン駆動用定電流回路121の異常を検出することができる。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】駆動回路を構成する各スイッチング素子に生じた短絡異常と区別して、精度良くセンサ異常の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、検出される山読み電流値Ix_hpの絶対値及び各谷読み電流値Ix_lpの絶対値の少なくとも何れかが、その電流検出の限界値に対応して設定された第1の閾値I1を超えるか否かを判定する。また、異常検出部は、その検出される相電流値Ixの絶対値が「0(ゼロ)」に対応して設定された第2の閾値I2よりも小さいか否かを判定する。そして、これら二つの判定条件を共に満たす相がある場合には、当該相にセンサ異常(張り付き異常)が発生したものと判定する。
(もっと読む)
コントローラ
【課題】モータの回転バランスを向上することの可能なコントローラを提供する。
【解決手段】第1インバータ回路と第2インバータ回路とは異なる経路でモータに駆動電流を供給する。カスタムIC92は、第1インバータ回路に制御信号を出力する第1プリドライバ91、及び第2インバータ回路に制御信号を出力する第2プリドライバ98を有し、制御基板40に実装される。第1プリドライバ91と第2プリドライバ98の出力を制御する信号を出力するマイコン94は、第1インバータ回路からの距離と第2インバータ回路からの距離とが同じ中央線S上で制御基板40に実装される。マイコン94の出力端子101、カスタムIC92の入力端子103及び出力端子105と、マイコン94の出力端子102、カスタムIC92の入力端子104及び出力端子106とは中央線Sを挟んで対称に設けられる。
(もっと読む)
1 - 20 / 175
[ Back to top ]