
Fターム[5H501LL54]の内容
Fターム[5H501LL54]に分類される特許
1 - 20 / 51
モータ制御装置
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
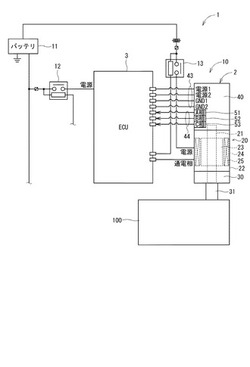
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
モータ制御装置

【課題】単相のエンコーダ信号によって三相スイッチング制御を実行する。
【解決手段】エンコーダ8は、二相のエンコーダ信号PA、PBを出力する。二相制御手段17は、両方のエンコーダ信号PA、PBに同期して励磁相を切換える。ひとつのエンコーダ信号だけが失われると、単相制御手段18によってモータ7が制御される。単相制御手段18は、失われたエンコーダ信号に代わって切換時期を推定する推定手段23を備える。単相制御手段18は、初期にオープン制御手段25によるオープン制御を実行する。オープン制御によってモータ7の回転が安定すると、単相フィードバック制御手段24による制御へ移行する。単相フィードバック制御手段24は、正常なエンコーダ信号と、推定された切換時期との両方に応答して励磁相を切換える。この結果、単相だけでもモータ7の制御が実行される。
(もっと読む)
電力変換装置
【課題】電動機の運転開始前に、エンコーダの光学センサの異常を検出可能とする。
【解決手段】半導体スイッチの駆動信号を生成する制御装置を有し、エンコーダの二相の出力信号から演算した回転速度を制御装置にフィードバックして前記駆動信号を生成する電力変換装置において、エンコーダ10の出力信号に基づいて配線系統の異常等を検出したときに、電動機200を停止させる安全遮断信号を制御装置50に送出する安全機能装置40を備え、制御装置50は、運転開始前に安全機能装置40からテスト開始指令が入力されたときに、電動機200の固定子巻線の線間に短期間だけ直流電圧を印加して回転子にトルクを発生させるための制御演算器51を有し、安全機能装置40は、前記直流電圧の印加期間内にエンコーダ10の出力信号が変化しないときはエンコーダ10内部の光学センサの異常と判断して安全遮断信号を出力する。
(もっと読む)
車両および電流検出装置の異常判定方法
【課題】電流センサの故障を容易に検出することができ、かつ、生産コストの上昇を抑制する。
【解決手段】MG−ECUは、電流Ivを検出する2つの電流センサの検出値Iv1とIv2とが一致する場合(S100にてYES)、電流Ivおよび電流Iwの各々の最大値および最小値を計測するステップ(S102)と、電流Ivおよび電流Iwの振幅をそれぞれ算出するステップ(S104)と、電流Ivの振幅と電流Iwの振幅とが一致する場合に(S108にてYES)、第1乃至第3の電流センサが正常状態であると判定するステップ(S110)と、電流Ivの振幅と電流Iwの振幅とが一致しない場合(S108にてNO)、電流Iwを検出する電流センサが異常状態であると判定するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
回転子の位置検出方法、電動機の制御方法、電動機制御装置及びプログラム
【課題】ノイズ等の外乱による誤動作や断線状態を検出できないR/Dコンバータを用いても回転子の回転位置に基づいて電動機の制御を滞りなく行う。
【解決手段】共通のコネクタC1,C2を介してそれぞれ第1及び第2のケーブル6,8で回転位置検出器2及びサーミスタ4が接続される処理部20において、回転位置検出器2の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程と、品質に関する情報が正常であるか否かを判断する第2の工程と、第2の工程で肯定的結果が得られた場合に当該回転位置に関する情報に基づいて回転位置を演算する第3の工程と、第2の工程で否定的結果が得られた場合に、当該品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程と、第4の工程で否定的結果が得られた場合、第3の工程で演算された回転位置に基づいて、回転位置を補間して求める第5の工程とを実行する。
(もっと読む)
操舵装置
【課題】 不揮発性メモリに推定温度データを書き込むことができなかった場合でも、過熱防止機能を維持しつつ、電動モータによる操舵機能が十分得られるようにする。
【解決手段】 マイコンは、EEPROMのデータが異常である場合には、予め高温設定された仮基板温度Tbmaxから温度センサにより検出された基板温度Tbを減算した基板温度変化値ΔT(Tbmax−Tb)を使って、モータ推定温度を計算するための各仮温度値SUM1max,SUM2max,SUM3maxを補正する(S61,S62)。従って、基板温度Tbに応じた初期値SUM1(n-1),SUM2(n-1),SUM3(n-1)を設定することができる。この場合、温度センサが異常である場合には、基板温度変化値ΔT(Tbmax−Tb)を使った補正を行わない(S63)。
(もっと読む)
電流センサの異常判定装置および電流センサの異常判定方法
【課題】低コストで正確に電流センサの異常を判定することが可能な電流センサの異常判定装置を提供する。
【解決手段】制御装置30は、電圧センサ58の検出値に基づいてコンデンサCのエネルギーを算出し、そのエネルギーの変化に基づいてコンデンサCの充放電電流を算出する。そして、制御装置30は、電流センサ56の検出値およびコンデンサCの充放電電流に基づいて、インバータ20に流れる電流すなわちモータ電流を推定する。制御装置30は、その推定された電流と電流センサ52,54の検出値とを比較し、その比較結果に基づいて電流センサ52,54の異常を判定する。
(もっと読む)
回転角度検出装置、回転電機装置および電動パワーステアリング装置
【課題】従来の回転角度検出の校正装置にあっては第2高調波の大きさが分かるものの、位相を考慮できていないという問題点があり、第2高調波の影響を完全に除去できないことがあった。また、ゼロ点パラメータの補正と第2高調波の補正を別々の手段で行なっているため、構造が複雑となってしまうという課題があった。
【解決手段】
互いに位相のずれた正弦波状の2相の出力信号を用いて回転角度を検出する、軸倍角がN(Nは正の整数)の回転角度検出装置であって、2相の出力信号をそれぞれEsin,Ecosとしたとき、Esin、Ecosの直流成分、およびEsin、EcosのN次成分を基本波成分としたときの第2高調波成分の振幅と位相に依存して発生する角度誤差N次成分(機械角360度周期の角度誤差を1次とした)を打ち消す手段として、回転角度に対して一定となる補正値を、2相の出力信号Esin、Ecosの少なくとも一方に加算する補正手段を備える。
(もっと読む)
モータシステム
【課題】電流検出回路に用いられている素子のばらつきに起因する誤差を正しく補正することによって、三相関係の不平衡をなくす。
【解決手段】補正係数演算部10は、ダイナミックブレーキ抵抗回路切替部7がPWM方式三相インバータ1からダイナミックブレーキ抵抗8a,8b,8cへと経路を切り替えたときにおけるU相とV相のモータ電流の検出値に基づき、U相とV相に発生する誘起電圧を利用して、V相のモータ電流の検出値の補正係数を演算する。乗算器12は、V相のモータ電流の検出値の補正係数に基づき、V相のモータ電流の検出値を補正して、U相とV相のモータ電流の検出値のアンバランスを補正する。
(もっと読む)
ハイブリッド車両のレゾルバ短絡と断線感知用回路及びこれを利用したレゾルバ短絡と断線の感知方法
【課題】レゾルバのフォルト状態が断線または短絡であるかを正確に分析して把握できるようにしたハイブリッド車両のレゾルバ短絡と断線感知用回路及びこれを利用したレゾルバ短絡及び断線感知方法を提供する。
【解決手段】CPU14と連結されたRDC12の入力側に連結されるレゾルバの各出力信号端との間に断線及び短絡感知用抵抗Roを連結し、各出力信号端を介してRDC12に出力される出力信号である差動信号(S1−S3、S2−S4)より前記断線及び短絡感知用抵抗Roと電源側と出力信号端間に連結されたプルアップ抵抗Rp間の分圧による一定電圧をCPU14で測定できるようにする。
(もっと読む)
回転情報算出装置、軸受装置、モータ制御装置、ステアリング装置及び電動パワーステアリング装置
【課題】位置検出信号の異常検出に係る演算負荷を軽減することが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号(位置検出信号)のサンプリング値a、b、cからA相の回転角度位置θA4、B相の回転角度位置θB3、C相の回転角度位置θC4を算出し、それらが同等であるときには、それらの回転角度位置を正常な回転角度位置として算出出力する。一方、これらの回転角度位置が同等でない場合には、サンプリング値a、b、cの夫々に対応する理想角度データを算出し、それらを比較することで、異常の発生している磁気検出信号(位置検出信号)を特定する。また、異常の発生している磁気検出信号(位置検出信号)が1つだけである場合には、正常な残りの磁気検出信号(位置検出信号)を用いた回転角度位置を算出出力する。
(もっと読む)
回転機械システム
【課題】回転機械システムとして、回転機械と電動機とを接続する動力伝達機構の異常を適切に検出することである。
【解決手段】回転機械システム10は、一般的に送風機と呼ばれる部分を構成する送風機本体20と電動機30と、送風機と呼ばれる部分の異常を検出する制御部50とその表示を行う表示部60を含む。駆動電流検出センサ38は、電動機30の駆動電流について、電動機30の無負荷電流以上であり、送風機本体20の吸込口22を閉じたときの回転機械無負荷時負荷電流以下の範囲内で予め任意に設定された電流閾値以下になったことを検出し、これによって動力伝達機構であるベルト36の切断を検出する。
(もっと読む)
モータ速度制御装置
【課題】モータから回転に同期したパルス信号を1種類しか得られないモータ速度制御装置は、モータの逆転暴走を生じ得る。
【解決手段】フィードフォワード制御部は、モータの目標回転速度ωTの大きさと向きとを設定する目標設定値を入力され、ωTに基づいて目標指令信号を生成する。フィードバック制御部は、(ω−ωT)に応じた誤差信号Veを生成し、Veに基づいて補償指令信号を生成する。モータ速度制御装置は、目標指令信号と補償指令信号とを合成した合成信号に基づいてモータの回転速度をωTに制御する。合成信号の回転速度に対する調節向きがωTの向きとは逆で、かつ合成信号の強度が所定の閾値を超えた状態が所定期間継続した場合に、逆転暴走状態であると判定し、正常状態への復旧処理を行う。
(もっと読む)
センサ異常検出装置及びセンサの異常検出方法
【課題】突発的な外乱の影響などによる誤検出を防止しながら、正弦波の出力を検出するセンサの異常を迅速に検出できるようにする。
【解決手段】モータ駆動電流を検出する2つの電流センサの検出値Ca,Cbをサンプリングし、これら電流センサの検出値Ca,Cbの差分ΔCが閾値Cthを越える場合には異常カウンタ14のカウンタ値CNTをインクリメントする。一方、差分ΔCが閾値Cth以下であれば、検出値Ca,Cbのサンプリングのタイミングがモータ駆動電流のゼロクロス付近であるか否かを判定し、ゼロクロス付近であれば異常カウンタ14のカウンタ値CNTを維持し、ゼロクロス付近以外であれば異常カウンタ14のカウンタ値CNTをリセットする。そして、異常カウンタ14のカウンタ値CNTが所定の基準値に達したときに、2つの電流センサの何れかが異常状態であると判定してリレー駆動信号RSを出力する。
(もっと読む)
モータ制御装置
【課題】回転角の推定演算を必要時にのみ行うことができ、しかも、演算開始後速やかに妥当な推定回転角を得ることができ、これによって、演算負荷の低減を図りながらモータを適切に制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。この間、回転角推定部31は推定演算を停止している。レゾルバ2の故障が発生すると、探査電圧発生部26から探査電圧指令値が発生され、モータ1のステータは探査磁界を形成する。このときのトルクセンサ7の出力に基づいて、初期値決定部24が回転角推定部31の内部変数の初期値を決定する。この初期値を用いて、回転角推定部31が推定回転角θEを求める。この推定回転角θEを用いてモータ1が制御される。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、dq軸目標電流値演算部16、dq軸電圧指令値演算部19、電圧指令値座標変換部20およびPWM制御部21などによってモータ1が正弦波駆動される。レゾルバ2の故障時には、通電パターン駆動部24によって所定の通電パターンでモータ1が矩形波駆動される。トルクセンサ7によって検出される操作トルクが大きいときには、脱調を回避するために、通電パターン駆動部24によるモータ1の駆動が停止される。
(もっと読む)
モータ駆動装置
【課題】回路構成が単純であってコストアップを抑制することができ、しかも故障箇所の特定が容易なモータ駆動回路を提供する。
【解決手段】A/Dコンバータ41は、モータ10に流れる電流の値をフィードバック信号Sbに変換する。制御部42は、フィードバック信号Sbと電流指令信号Saとの間の差分を演算して電圧の大きさを示す電圧指令信号Scを出力する。D/Aコンバータ43は、電圧指令信号ScをD/A変換して電圧を出力する。判定部44は、電圧指令信号Scとフィードバック信号Sbとに基づいてモータ10の故障判定を行う。
(もっと読む)
モータ制御装置及びその制御方法
【課題】インバータ制御における零点調整の精度を低下させることなく、故障モードを検出し、故障状況に対応して、他のモータによる走行を可能とするモータ制御装置及びその制御方法を提供する。
【解決手段】車両駆動装置1は、直流電源であるバッテリ15と、バッテリ15の電圧を昇圧するコンバータ14と、車両を駆動するMG1モータ11に接続されたインバータ28と、モータ又は発電機として機能するMG2モータ・ジェネレータ12に接続されたインバータ29と、モータを制御するモータ制御装置18と、を含んでいる。車両駆動装置1には、電圧計と、各インバータ28,29の無通電状態を判定する無通電判定器13,14と、インバータの各相アームからモータに印加される電流を検出する電流計41〜44と、が設けられており、これらの信号及び無通電判定器14からの信号はモータ制御装置18へ送られる。
(もっと読む)
1 - 20 / 51
[ Back to top ]