
Fターム[5H501MM11]の内容
電動機の制御一般 (20,975) | 保護、補償、監視、表示 (962) | バックアップ (34)
Fターム[5H501MM11]に分類される特許
1 - 20 / 34
電動機の駆動装置
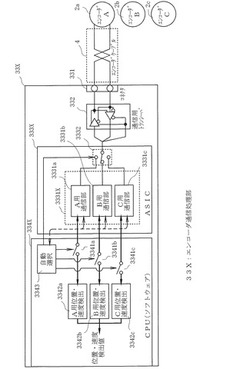
【課題】駆動装置側に複数種類の通信プロトコルに応じた通信部及び検出プログラムを備えることで、使用する検出器の選択肢を拡大する。
【解決手段】電動機の可動子の位置または速度を検出するエンコーダの検出データを、エンコーダとの間のシリアル通信により取得し、前記検出データを用いて電動機を駆動する駆動装置において、複数のエンコーダ2a,2b,2cがそれぞれ有する複数種類の通信プロトコルに従って前記検出データを送受信可能な複数の通信部3331a,3331b,3331cと、これらの通信部を介して受信した前記検出データを処理する複数の検出プログラム3342a,3342b,3342cとを備え、各通信プロトコルに従って送信されたデータ要求コマンドに対する応答データが正しいことをもってエンコーダの通信プロトコルを同定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置

【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
モータ駆動装置
【課題】モータ駆動用の電源に異常が起きた場合であっても、モータを良好に駆動し続けることが可能なモータ駆動装置を実現する。
【解決手段】モータ駆動装置において、モータのコアに第1巻線と第2巻線とが巻回され、第1巻線及び第2巻線のうち、第1巻線のみに電流が流れるように第1巻線と接続している第1電源と、第1巻線及び第2巻線のうち、第2巻線のみに電流が流れるように第2巻線と接続している第2電源と、第1電源及び第2電源のうち、モータを駆動するために使用する電源を選択する選択部と、を有する。選択部は、第1電源が正常であるときには、第1電源からの電流が第1巻線に流れるように、第1電源が異常であるときには、第2電源からの電流が第2巻線に流れるように、モータを駆動するために使用する電源を選択する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置
【課題】モータ駆動式の可変バルブタイミング制御システムにおいて、モータ回転状態検出系の異常診断の誤判定を未然に防止する。
【解決手段】エンジンのクランク軸10の回転速度の1/2の回転速度に対してモータ18の回転速度を調整することでクランク軸10に対するカム軸13の回転位相(カム軸位相)を変化させてバルブタイミングを変化させる。モータ18を駆動するEDU23は、モータ回転位置に応じた位置信号とモータ回転方向に応じた方向信号をECU22に出力する。モータ回転速度が小さくなると、位置信号や方向信号のエッジを検出できないためにモータ回転状態検出系の異常診断を誤判定する可能性がある。この対策として、ECU22は、カム軸位相変化速度とエンジン回転速度に基づいてモータ回転速度を推定し、モータ回転速度が0付近の所定範囲内にあるときに異常診断を禁止する。
(もっと読む)
モータ制御装置
【課題】使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、モータの発熱(温度上昇)を抑えて、モータの寿命低下や故障を未然に防止できるようにする。
【解決手段】電源投入後の初期駆動時に、モータ12の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ46の出力信号のエッジをカウントし、初期駆動終了時のエンコーダカウント値とロータの回転位置と通電相との対応関係を学習し、その後の通常駆動時に、エンコーダカウント値と初期駆動終了時の学習結果に基づいて通電相を決定する。初期駆動終了後は所定の禁止期間が経過するまで初期駆動の実行を禁止し、使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、初期駆動が繰り返し実行されることを未然に防止する。初期駆動終了後、禁止期間内に電源切断操作が行われても、メインリレー51を切断せずにレンジ切換制御装置42への電源供給を継続する。
(もっと読む)
モータ制御装置
【課題】 電流指令等のモータ駆動信号を使用して温度を推定する温度推定部を具備し、モータやインバータ回路等の熱的保護を行なうモータ制御装置において、熱的保護対象物の実際の温度と温度推定値とのずれを従来よりも抑制することによって、正確に熱的保護を行なう。
【解決手段】 モータ制御装置20は、モータ4を駆動させる駆動信号に基づいて熱的保護対象物の温度の推定値を算出する温度推定部7と、モータ制御装置20の電源オフ時間の長さを計測する電源オフ時間確認部9と、電源オフ時間における熱的保護対象物の温度推定値を算出する推定値変更部10とを備える。推定値変更部10には電源オフ時間における熱的保護対象物の放熱曲線が記憶され、この放熱曲線に、電源が切られた時点における熱的保護対象物の温度の推定値と電源オフ時間の長さとを当てはめることにより、リスタート時の熱的保護対象物の温度の推定値を算出する。
(もっと読む)
PWM信号変換装置、ファン装置、PWM信号変換方法およびファン制御方法
【課題】
意図しない機器の停止または機能低下を防止する。
【解決手段】
PWM信号変換装置は、第1のPWM信号を入力し、第1のPWM信号のデューティサイクルが第1の所定の値以下である場合は、第1の所定の値よりも大きい第2の所定の値のデューティサイクルである第2のPWM信号を出力する。
(もっと読む)
モータ電力供給回路および動力液圧源
【課題】モータ電力供給回路における断線を検出する。
【解決手段】モータ電力供給回路100は、レジスタ106を介した第1電源ライン108と、レジスタを介さない第2電源ライン110とを通して並列にバッテリ114からモータ32へ電力を供給可能である。モータ電力供給回路100は、モータ32の作動状況を検出するモータ通電モニタライン112と、第1電源ライン108に介在された第1リレースイッチ102と、第2電源ライン110に介在された第2リレースイッチ104と、第1リレースイッチ102または第2リレースイッチ104のいずれか一方をオンし、そのときに検出されたモータ32の作動状況に基づいて、第1リレースイッチ102または第2リレースイッチ104の断線を検出するブレーキECU200とを備える。
(もっと読む)
負荷駆動装置
【課題】停電に対するバックアップ機能を、低コストでエネルギ効率良く実現した簡易な構成の負荷駆動装置を提供する。
【解決手段】コンバータから得られる直流電力にてモータを駆動すると共に、モータに生起された回生電力を回収するインバータと、コンバータからの直流電力または前記インバータにて回収された回生電力を蓄積すると共に、蓄積した電力を前記インバータに出力するコンデンサ(電気二重層キャパシタ)とを備え、特にコンデンサに蓄積された電力量が一定となるように前記コンバータの作動を制御すると共に、コンデンサに蓄積された電力量が低下したときには非常用発電機を起動する電力制御装置を備える。
(もっと読む)
スイッチトリラクタンスモータ制御方法およびその装置
【課題】回転子の回転位置の推定精度を高く維持する。
【解決手段】回転位置推定相を決定する推定相決定部61と、決定された回転位置推定相における巻線電流iを選択する推定相電流選択部62と、選択された巻線電流i、インバータにおける直流電圧VdcおよびPWMパターンを入力として、決定された回転位置推定相における磁束鎖交数λを算出する推定相磁束鎖交数算出部63と、選択された巻線電流iおよび算出された磁束鎖交数λを入力として回転位置推定演算を行って第1推定回転位置θMを出力する位置推定演算部64と、過去の推定回転位置と過去の回転速度に基づいてバックアップ回転位置としての第2推定回転位置θpを算出するバックアップ位置算出部65と、第1推定回転位置θMまたは第2推定回転位置θpを選択して最終的に得られた推定回転位置θeとして出力する推定回転位置選択部66とを有している。
(もっと読む)
センサ異常検出装置及びセンサの異常検出方法
【課題】突発的な外乱の影響などによる誤検出を防止しながら、正弦波の出力を検出するセンサの異常を迅速に検出できるようにする。
【解決手段】モータ駆動電流を検出する2つの電流センサの検出値Ca,Cbをサンプリングし、これら電流センサの検出値Ca,Cbの差分ΔCが閾値Cthを越える場合には異常カウンタ14のカウンタ値CNTをインクリメントする。一方、差分ΔCが閾値Cth以下であれば、検出値Ca,Cbのサンプリングのタイミングがモータ駆動電流のゼロクロス付近であるか否かを判定し、ゼロクロス付近であれば異常カウンタ14のカウンタ値CNTを維持し、ゼロクロス付近以外であれば異常カウンタ14のカウンタ値CNTをリセットする。そして、異常カウンタ14のカウンタ値CNTが所定の基準値に達したときに、2つの電流センサの何れかが異常状態であると判定してリレー駆動信号RSを出力する。
(もっと読む)
モータ回路及び電動パワーステアリング装置
【課題】相巻線が環状結線された交流モータを備えたモータ回路において、異常発生時に、相巻線を一部に含む閉回路の形成を防止することが可能なモータ回路及び、そのモータ回路を備えた電動パワーステアリング装置の提供を目的とする。
【解決手段】本発明に係る操舵制御装置40は、U相の給電ライン42Uが1対の分岐給電ライン42U1,42U2に分岐しており、それら分岐給電ライン42U1,42U2と、V相及びW相の給電ライン42,42Wのそれぞれの途中に、相開放用MOSFET51,53が設けられかつ、これら相開放用MOSFET51,53は、その寄生ダイオード51D,53Dがモータ19に対して同じ向きになるように配置されている。そして、異常発生時には、全ての相開放用MOSFET51,53がターンオフされる。すると、モータ10の相巻線191,192,193を含む通電可能な閉回路が存在しなくなる。
(もっと読む)
電気推進システムの保護方法
【課題】少なくとも1つの給電電路の保護装置が開路した場合でも、健全側給電電路が過負荷にならないようにする。
【解決手段】電池(B1,B2)と、この電池を充電する発電機(G1,G2)とからなるハイブリッド電源を2系統備えるとともに、各ハイブリッド電源から推進電動機に給電する2系統の給電電路(S1,S2)を備え、各給電電路にそれぞれ保護装置(CB1,CB2)を設けてなる電気推進システムにおいて、電池のみで推進電動機および補機類へ電力を供給して運転する電池運転モード時であって75%を超える推進電動機回転速度で運転中に、各給電電路の保護装置CB1,CB2のいずれかが開路したときは、推進電動機M1,M2の回転速度上限値を75%に制限することで、健全側給電電路が過負荷にならないようにする。
(もっと読む)
モータ制御装置
【課題】回転角の推定演算を必要時にのみ行うことができ、しかも、演算開始後速やかに妥当な推定回転角を得ることができ、これによって、演算負荷の低減を図りながらモータを適切に制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。この間、回転角推定部31は推定演算を停止している。レゾルバ2の故障が発生すると、探査電圧発生部26から探査電圧指令値が発生され、モータ1のステータは探査磁界を形成する。このときのトルクセンサ7の出力に基づいて、初期値決定部24が回転角推定部31の内部変数の初期値を決定する。この初期値を用いて、回転角推定部31が推定回転角θEを求める。この推定回転角θEを用いてモータ1が制御される。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、dq軸目標電流値演算部16、dq軸電圧指令値演算部19、電圧指令値座標変換部20およびPWM制御部21などによってモータ1が正弦波駆動される。レゾルバ2の故障時には、通電パターン駆動部24によって所定の通電パターンでモータ1が矩形波駆動される。トルクセンサ7によって検出される操作トルクが大きいときには、脱調を回避するために、通電パターン駆動部24によるモータ1の駆動が停止される。
(もっと読む)
交流モータ装置
【課題】信頼性に優れ、トルク増大も可能な交流モータ装置を提供すること。
【解決手段】互いに独立する3相コイル11〜13には、互いに独立する3つのHブリッジ21〜23から独立に単相交流電流が給電される。このようにすれば、装置コストの増大を抑止しつつ、装置の信頼性の向上及びトルクの一時的な向上が可能となる。
(もっと読む)
ステアリング装置の制御装置
【課題】バッテリの補助電源として使用されるキャパシタないしはコンデンサの内部抵抗の増加を抑制して電力の損失を減少させることができるステアリング装置の制御装置を提供する。
【解決手段】バッテリ9Bの補助電源としてキャパシタ10を備えており、電動モータ4の駆動力を利用するステアリング装置2における制御装置。前記キャパシタ10への通電電流を検出する電流検出器21と、前記キャパシタ10の端子間電圧を検出する電圧検出器20と、前記電流検出器21から得られる電流値と前記電圧検出器20から得られる電圧値とから前記キャパシタの内部抵抗を求める演算手段と、前記キャパシタ10への充電及び当該キャパシタ10からの放電を行う充放電回路13と、前記演算手段により求められた内部抵抗が所定の閾値よりも大きい場合に、前記充放電回路13を駆動させて前記キャパシタ10の充放電を行う制御回路6とを備えている。
(もっと読む)
1 - 20 / 34
[ Back to top ]