
Fターム[5H501MM17]の内容
電動機の制御一般 (20,975) | 保護、補償、監視、表示 (962) | 検出誤差の補償 (91)
Fターム[5H501MM17]の下位に属するFターム
軸の偏心、軸のねじれによるもの (12)
回転検出器によるもの (33)
Fターム[5H501MM17]に分類される特許
1 - 20 / 46
回転機の制御装置
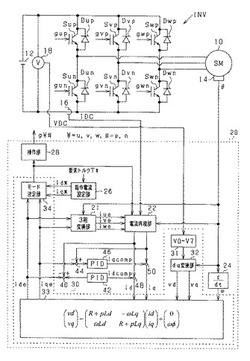
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法

【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
位置検出装置及びサーボモータ
【課題】アクチュエータ毎に補正データを記憶するメモリを備える必要のない位置検出装置を提供する。
【解決手段】レゾルバ2がモータ1の回転位置情報を電気信号として出力し、その電気信号を電気ケーブル3で位置検出装置4のレゾルバデジタルコンバータ6に伝送し、レゾルバデジタルコンバータ6は電気信号からモータ1の回転位置情報を検出し、メモリ7に記憶されている電気ケーブルの情報に基づいて、演算装置8が検出されたモータ1の回転位置情報を補正することにより、レゾルバ2が設けられるモータ1毎に補正データを記憶するメモリを備える必要がない。また、電気ケーブル3の長さに対するインピーダンスの差による精度誤差情報を電気ケーブルの情報として記憶することにより、レゾルバ2で検出されるモータ1の回転位置の位置情報を正確に補正することが可能となる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
電流センサ制御装置
【課題】電流センサの残留磁界による誤差と時間的変動による誤差とにより生じる、電流センサのオフセットを補償する。
【解決手段】負荷に流れる電流を検出する電流センサ6と、電流センサ6のオフセットを補償するオフセット補償部7と、電流センサ6の残留磁界を減少させる消磁電流を生成する回路部とを備え、オフセット補償部7は、電流センサ6により測定される消磁電流の測定値と、測定値に対応する消磁電流の電流値とを用いて電流センサ6のオフセット値を演算し、オフセット値に基づいてオフセットを補償する。
(もっと読む)
モータ制御装置
【課題】モータの挙動に基づいて励磁相のずれを検出し、励磁相のずれを補正する。
【解決手段】伝達機構3は、パーキング位置と、非パーキング位置とに切換えられるマニュアルレバー3aを有する。マニュアルレバー3aは、SR型のモータ12によって駆動される。モータ12の回転位置は、エンコーダ13によって検出される。制御装置11は、エンコーダ13からの信号を計数することによりロータの位置を示すカウント値Nを算出する。制御装置11は、カウント値Nに基づいて励磁相を選択し、モータ12を駆動する。制御装置11は、P位置と非P位置との間の切換え速度に基づいて、励磁相をずれを検出し、励磁相のずれ方向を判定する。さらに、制御装置11は、検出された励磁相のずれを補正する。励磁相学習処理および壁当て処理を含む初期化処理だけに依存することなく、励磁相のずれを検出し、補正することができる。
(もっと読む)
モータ制御装置
【課題】モータ側の出力軸とレンジ切換機構のマニュアル軸との嵌合連結部に遊びが存在するシステムにおいて、レンジ切換機構の制御精度を確保できるようにする。
【解決手段】予め設定された遊び量(製造ばらつき上限品における嵌合連結部の遊び量θBmax)の1/2に相当する回転角度量(θBmax/2)を補正値として設定し、目標レンジにシフトする際に、目標レンジに対応する目標出力軸回転角θ3tg を設定して、出力軸14aが目標出力軸回転角θ3tg よりも補正値(θBmax/2)だけ余分に回転されるように目標出力軸回転角θ3tg を補正して仮想目標出力軸回転角θ2tg を設定し、出力軸14aの回転角をこの仮想目標出力軸回転角θ2tg に制御する。これにより、ローラ27の駆動停止位置の制御誤差を遊び量最大値θBmaxの1/2以下に抑えることができると共に、遊び量を学習する処理を行う必要がなく、制御回路の演算負荷を軽減することができる。
(もっと読む)
負荷制御装置
【課題】ダイオードの順方向電圧の変動によるダイオードのカソードの電位の変動を抑制する負荷制御装置を提供する。
【解決手段】出力回路11は入力された指令値を変数とする関数に従って第1電位をダイオードD10のアノードに印加する。指令出力部10は基準指令値から第1補正値を減算して第2補正値を加算して指令値を求める。基準指令値は、所定温度下及び所定電流が流れる状況下での、ダイオードD10のアノードの第1電位とカソードの第2電位との差である基準両端電圧と、負荷の制御とに基づいて設定される。第1補正値は基準両端電圧から関数の逆関数に従って求められる指令値の差分である。第2補正値は、電圧検出部101によって検出された第1電位から逆関数に従って求められる指令値と、電圧検出部101によって検出された第2電位から逆関数に従って求められる指令値との差分である。
(もっと読む)
モータ駆動制御装置
【課題】回転数が安定な通常動作時だけでなく回転数が急変したときにも、モータの回転を検出する位置センサの出力に基づいてモータの回転数を正確に認識してモータを駆動制御する。
【解決手段】回転加速度算出部12の制御により、位置センサ7の基準信号(Z相の信号)より周期が短いパルス信号(A相、B相のパルス信号)に基づいて急変回転数算出部9が追従応答性よく算出した回転数の増減の変化量が所定値を超えない通常動作時には、前記基準信号に基づいて通常回転数算出部10が駆動モータ2の実際の回転の細かな変動の影響を受けることなく算出した回転数を認識回転数として選択部11からインバータ制御部13に出力し、急変回転数算出部9が算出した前記変化量が所定値を超えると、急変回転数算出部9が算出した回転数を認識回転数として選択部11からインバータ制御部13に出力し、インバータ制御部13により認識回転数に基づいてインバータ3を制御する。
(もっと読む)
位置データ補正装置、エンコーダ、モータシステム及び位置データ補正方法
【課題】より容易かつ適切に誤差を補正することが可能な、位置データ補正装置、エンコーダ、モータシステム及び位置データ補正方法を提供すること。
【解決手段】位置データ補正装置100は、1ピッチで1周期変動する検出信号に基づいて生成される移動体の位置データに基づいて、位置するピッチを特定するピッチ特定部102と、位置データに基づいて、位置するピッチ内位置を特定するピッチ内位置特定部101と、線形の誤差関数のパラメータがピッチそれぞれに設定された複数の区間毎に予め記録されたメモリ103と、特定したピッチとピッチ内位置とに基づいて区間に対応したパラメータを取得するパラメータ取得部104と、パラメータに基づいてピッチ内位置の誤差補正値を算出する誤差補正値算出部105と、当該誤差補正値に基づいて位置データを補正する位置データ補正部107と、を有する。
(もっと読む)
演算処理方法
【課題】磁極間のパルス数が整数とならない場合においても磁界を発生させるポイントのずれを回避することができ、制御性能の低下を抑制することができる。
【解決手段】モータへの電流指令位置を求める演算処理で、演算誤差を補正する。
(もっと読む)
サーボシステム
【課題】モータ側にレゾルバの角度誤差補正値を記憶させ、省配線が可能なサーボシステムを提供する。
【解決手段】回転角検出器は、レゾルバと、レゾルバ角度誤差補正値記憶手段と、第1インターフェース素子と、電源と、第1端子切替手段とで構成され、モータ制御装置は、前記レゾルバ励磁用発振回路と、レゾルバ/デジタル変換手段と、電源回路と、第2インターフェース素子と、演算手段と、第2端子切替手段とで構成され、前記第1端子切替手段は前記レゾルバ励磁線と前記電源線、及び、前記レゾルバ出力線と前記第1インターフェースに接続される配線とを切り替え可能とし、前記第2端子切替手段は前記発振回路の配線と前記電源回路の配線、及び、前記レゾルバ出力線と前記第2インターフェースに接続される配線とを切り替え可能とし、前記回転角検出器と前記モータ制御装置間は前記レゾルバ励磁線及び出力線と同数の配線のみで構成可能とした。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】電動モータMを位置センサレス制御する場合において、低い制御周波数であっても、コストアップを招くことなく、制御応答性を向上させる。
【解決手段】電動モータMに流れる電流値に基づいてロータの位置誤差を推定し、推定された前記位置誤差d_BEMFからロータの回転速度を推定し、推定された前記回転速度ω^と予め設定した設定速度との偏差に少なくとも基づいて前記電動モータMに付与すべき制御電圧又は制御電流を設定する。その際に、電動モータMの慣性モーメントを測定しておき、前記回転速度ω^の推定パラメータとして、前記位置誤差d_BEMFに加えて前記慣性モーメントを用いるようにした。
(もっと読む)
モータドライブ制御装置、モータドライブ制御方法
【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
モータ駆動回路、ステージ装置および露光装置
【課題】回路設計が柔軟にでき、かつ高精度な定電流を出力するモータ駆動回路を提供することを課題とする。
【解決手段】入力端子61に印加された指令電圧を電流に変換し前記電流をモータへ供給する電流出力段63と、モータの負荷65と直列に接続されている抵抗であって、該抵抗のうち少なくとも1つの抵抗の温度係数が他のいずれかの抵抗の温度係数と異なっている複数の抵抗641から64nと、複数の抵抗641から64nそれぞれの両端にかかる各電圧に基づく電圧を入力端子61に負帰還させてモータの負荷65に供給する電流を制御する負帰還回路とを有する。
(もっと読む)
モータシステム
【課題】電流検出回路に用いられている素子のばらつきに起因する誤差を正しく補正することによって、三相関係の不平衡をなくす。
【解決手段】補正係数演算部10は、ダイナミックブレーキ抵抗回路切替部7がPWM方式三相インバータ1からダイナミックブレーキ抵抗8a,8b,8cへと経路を切り替えたときにおけるU相とV相のモータ電流の検出値に基づき、U相とV相に発生する誘起電圧を利用して、V相のモータ電流の検出値の補正係数を演算する。乗算器12は、V相のモータ電流の検出値の補正係数に基づき、V相のモータ電流の検出値を補正して、U相とV相のモータ電流の検出値のアンバランスを補正する。
(もっと読む)
モータ駆動装置およびトルクリップル除去方法
【課題】電流センサのオフセット電圧に起因するトルクリップルを簡便に低減する。
【解決手段】リップル演算器25は電流センサ17のオフセット電圧に起因して発生するdq軸の電流のリップル成分をレゾルバ15の出力値およびdq座標変換器19の出力値に基づいて演算する。リップル減算器41はリップル演算器25の演算結果に基づいてdq軸の電流からリップル成分を減じる。一方、オフセット電圧演算器31はオフセット電圧演算器31の演算結果に基づいて電流センサ17のオフセット電圧を演算する。オフセット電圧補償器33は電流センサ17の出力電圧からオフセット電圧演算結果を減じる。これにより、電流センサ17のオフセット電圧が自動補償され、電流センサ17のオフセット電圧に起因するトルクリップルが回転電動機11の回転に伴い減少する。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】円滑で正確な位置決めを行うことができるモータ制御方法およびモータ制御装置を提供する。
【解決手段】 誤差補償後位置検出値と前記位置検出値との差分である誤差補償関数として、前記位置指令値を等速変化させる条件下において前記位置指令値と前記誤差補償後位置検出値との差分を最小化するような、前記検出誤差に対応する周期性をもつ関数を求める。また、求められた前記誤差補償関数を適用して、前記誤差補償後位置検出値を前記位置指令値に一致させるように前記モータの位置制御を実行する。
(もっと読む)
モータ駆動回路
【課題】電流指令値通りの電流をモータのコイルに流すことができるモータ駆動回路を提供すること。
【解決手段】モータに流れる駆動電流を検出する第1の電流検出器と、この第1の電流検出器の不使用時に、前記モータに流れる前記駆動電流を検出する第2の電流検出器と、前記第1の電流検出器又は前記第2の電流検出器によって検出された値に基づいて前記駆動電流を電流指令値に制御する定電流駆動回路と、前記第1の電流検出器と前記第2の電流検出器を一定間隔で切り替える切り替え器と、を備える。
(もっと読む)
1 - 20 / 46
[ Back to top ]