
Fターム[5H505DD11]の内容
交流電動機の制御一般 (51,584) | 電動機の種類 (6,219) | リラクタンスモータ (37)
Fターム[5H505DD11]に分類される特許
1 - 20 / 37
横磁束機械
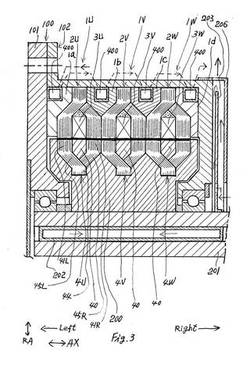
【課題】本発明の目的は、単純で経済的なコア構造をもつ横磁束機械装置(TFMA)を提供することである。本発明の他の対象は、インホイールモータやエンジンのクランクシャフトに結合された発電電動機やリニアモーター・ドライブのクランクシャフトの上でリニアコンプレッサのようない可変速用途において、優れたトルク特性をもつTFMAに提供することである。
【解決手段】このTFMAは、積層鉄板をもつコアを採用する。コアは、3D磁束通路を作るために、左斜め部及び右斜め部を有する。斜め部をもつ積層鉄コアを用いる複数の3D構造が、開示される。斜め部を使用することにより、コアはムカデのように見えます。CTFMと呼ばれるムカデのようなTFMは、複数のタイプをもつ。このCTFMのために、複数のモータ構造及び複数の駆動装置も開示される。
(もっと読む)
角速度推定装置

【課題】角周波数が低い領域においても、回転子の位置を推定する技術を提供する。
【解決手段】d軸電圧指令値Vd*からd軸電流Idに基づく電圧降下を減じてd軸誘起電圧edが得られ、q軸電圧指令値Vq*からq軸電流Iqに基づく電圧降下を減じてq軸誘起電圧eqが得られる。d軸誘起電圧edから修正積分器12によって推定d軸磁束φdが得られる。推定d軸磁束φdをq軸誘起電圧eqで除して推定角速度ω0が得られる。推定角速度ω0が積分されて推定位相θが得られる。修正積分器12は、同じカットオフ周波数ωcを有するローパスフィルタ13及びハイパスフィルタ14、及びこれら二つのフィルタの出力を加算して推定d軸磁束φdを出力する加算器16も有している。修正積分器12は更に、推定d軸磁束φdの上限を制限してハイパスフィルタ14に入力するリミッタ15をも備えている。ローパスフィルタ13にはd軸誘起電圧edが入力する。
(もっと読む)
モータの駆動装置
【課題】電流型インバータでインダクタンス負荷であるモータに方形波電流を通流し、SRモータを当該インバータで駆動することでSRモータの高効率化を図ることを課題とする。
【解決手段】電流源を実現する電圧チョッパ回路10と、誘起電圧を吸収するコンデンサとスイッチとからなるクランプ回路を備えた単相ブリッジ電流型インバータ20とを備え、前記クランプ回路のコンデンサとスイッチに並列に、モータの各相の駆動回路40を接続する。
(もっと読む)
回転電機駆動システム
【課題】回転電機駆動システムにおいて、ステータ巻線に過大な電流が流れることを防止しつつ、低い回転領域でもトルクの増大を図れる回転電機を実現することである。
【解決手段】ステータ12は、ステータコア26に集中巻きで巻装された複数相のステータ巻線28u,28v,28wを有する。ロータ14は、ロータコア16の周方向複数個所に巻装されたロータ巻線42n、42sと、各ロータ巻線42n、42sに接続され、各ロータ巻線42n、42sの磁気特性を周方向に交互に異ならせる整流部としてのダイオード21n、21sとを有する。回転電機駆動システムは、ステータ巻線28u,28v,28wに電流を流すためのq軸電流指令にパルス状に減少させる減少パルス電流を重畳させるとともに、d軸電流指令にパルス状に増加させる増加パルス電流を重畳させる減少増加パルス重畳手段を含む。
(もっと読む)
回転電機駆動システム
【課題】回転電機駆動システムにおいて、ステータ巻線に過大な電流が流れることを防止しつつ、低い回転領域でもトルクの増大を図れる回転電機を実現することである。
【解決手段】ステータ12は、ステータコア26に集中巻きで巻装された複数相のステータ巻線28u,28v,28wを有する。ロータ14は、ロータコア16の周方向複数個所に巻装されたロータ巻線42n、42sと、各ロータ巻線42n、42sに接続され、各ロータ巻線42n、42sの磁気特性を周方向に交互に異ならせる整流部としてのダイオード21n、21sとを有する。回転電機駆動システムは、ステータ巻線28u,28v,28wに電流を流すためのq軸電流指令にパルス状に減少させる減少パルス電流を重畳させる減少パルス重畳手段を含む。
(もっと読む)
モータ駆動装置
【課題】従来技術のモータ駆動装置では、回生電流によるモータへのトルク供給遮断期間にインバータの出力電圧位相を進めてインバータ出力からモータに強制的に電流を流すためモータ損失が増加する。
【解決手段】モータ3は、所定のモータ回転数域において、単相交流電源1のゼロクロス付近で発生する回生期間の長短により変化するモータ実効電流値の2乗と前記モータ3のモータ巻線抵抗の積とインバータ4あるいは双方向スイッチ群における損失の和が最小、好ましくは最小値の1.1倍未満となるようにモータ(巻線)仕様を調整されたモータ3を用いることにより、回生電流によるシステム損失増加を抑制できる。
(もっと読む)
回転機制御装置
【課題】位置推定のための高周波信号を重畳する、また、位置推定のための複雑な演算が必要となるという不利を改善し、簡便な方式で回転子位置の推定が可能となる回転機制御装置を得ることを目的とする。
【解決手段】オン信号パルスの発生タイミングを、第1のスイッチング周期と第2のスイッチング周期とで各相とも同じΔtだけシフトさせ、このシフトで発生する各相の電流変動成分を電流検出器4で検出し、当該各相電流変動成分と回転子位置θとの関係式に基づき、位置推定手段5により回転位置推定値θLを推定する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の高調波成分を検出することによって電気角θを推定するに際し、制御量の制御との干渉が生じるおそれがあること。
【解決手段】高調波電流検出部40では、ゼロベクトル期間においてモータジェネレータ10を流れる電流の高調波成分を抽出する。目標高調波電流生成部42では、基本波電流に基づき、目標高調波電流を算出する。偏差算出部44,46では、目標高調波電流と実際の高調波電流との差のγ成分とδ成分とをそれぞれ算出する。直交方向ベクトル生成部48では、基本波電流と逆位相の位相角φを用いた直交方向ベクトル(cosφ、−siφ)を算出する。外積演算部50では、直交方向ベクトルと偏差算出部44,46で算出された誤差ベクトルとの外積を算出する。位置推定器52では、外積をゼロとすべく電気角θを推定する。
(もっと読む)
インバータ装置
【課題】同期モータの特性に関係なく、簡単な制御で安定した運転を可能にする、安価かつ高性能なインバータ装置を提供する。
【解決手段】位相差検出部8は、インバータ回路2の交流電圧と交流電流との位相差を検出し、PI演算部11は、この位相差と目標とする位相差との誤差に応じたデューティ基準値を算出する。位相差振動検出部17は、位相差の振動成分を検出し、回転数補正量演算部18は、この振動成分に基づいて回転数補正量を算出する。回転数補正量の正負は位相差とデューティ基準値との関係に応じて決められる。PWM作成部15は、補正された回転数指令値に応じた正弦波データとデューティ基準値とに基づいて、PWM信号を作成して、インバータ回路2に出力する。
(もっと読む)
交流電動機の回転子位相速度推定装置
【課題】 本発明は、交流電動機のための駆動制御装置に使用される回転子位相速度推定装置に関し、特に、印加高周波信号の応答である応答高周波信号を処理して、回転子位相と準同期座標系位相との位相差に高い相関を有する相関信号を、軽演算負荷で生成し、これにより軽演算負荷で回転子の位相、速度を推定できる回転子位相速度推定装置を提供する。
【解決手段】 空間的に高周波数−ωhで逆回転する2軸高周波逆相座標系上で評価された応答高周波信号逆相成分相当値たる直流的2軸要素、空間的に高周波数ωhで正回転する2軸高周波正相座標系上で評価された応答高周波信号正相成分相当値たる直流的2軸要素、の少なくとも何れかの直流的2軸要素を生成する手段10−2aと、直流的2軸要素を用いた逆正接相当の処理を介して、位相差と相関を有する相関信号を生成する手段10−2bを、回転子位相速度推定装置に備えることにより相関信号を軽演算負荷で生成するようにして、課題を解決した。
(もっと読む)
モータ駆動制御装置
【課題】電源コンバータの小型軽量化および高効率化、エネルギー蓄積装置容量の最適化を図る。
【解決手段】交流電源側の電源コンバータとモータ側のインバータとを結ぶ直流母線に接続されたエネルギー蓄積装置を含むモータ駆動制御装置において、力行動作電圧設定手段と力行動作開始制御手段と力行動作停止制御手段と、回生動作電圧設定手段と回生動作開始制御手段と回生動作停止制御手段とを設け、電源コンバータの直流電圧が設定力行動作開始電圧に達したときに力行動作を開始させかつ設定力行動作停止電圧に達したときに力行動作を停止させるとともに、直流電圧が回生動作開始電圧に達したときに回生動作を開始させかつ設定回生動作停止電圧に達したときに回生動作を停止させる。
(もっと読む)
交流電動機の制御装置
【課題】磁極位置を遅れ時間なく高い精度で推定し、位置センサ及び速度センサを用いずに電動機の高い応答性を有するトルク制御、速度制御、位置制御を実現することができる交流電動機の制御装置を提供する。
【解決手段】任意に設定した時間周期内で指令電圧ベクトルを時間平均的に出力する電圧制御装置を備えた交流電動機の制御装置において、任意の時間周期毎に電動機印加電圧の振幅と位相とを操作する矩形波電圧発生器と、時間周期のN分の1(N≧1)の周期に同期させて電動機電流を検出する電流検出器と、電動機電流を2相電流に座標変換する座標変換器と該2相電流から振幅が周期的に変化する波形の2相電流を得てその包絡線を抽出する包絡線抽出器と包絡線に基づき磁極位置を演算する磁極位置を演算する磁極位置演算器と前記磁極位置推定値に基づき速度を演算する速度演算器とを備える。
(もっと読む)
回転機の制御装置及び制御システム
【課題】モータジェネレータのトルクを制御すべくインバータの出力電圧の位相を操作する場合、その制御性を高く維持することが困難なこと。
【解決手段】位相設定部34では、要求トルクTdと推定トルクTeとの差に基づき、インバータの出力電圧ベクトルの位相δを設定する。ノルム算出部36aでは、モータジェネレータの電気角速度ωと要求トルクTdとに基づき、インバータの出力電圧ベクトルのノルムVn1を設定する。ノルム補正部36bでは、実電流の位相を指令電流の位相にフィードバック制御すべくノルムVn1の補正量Vncorを算出する。加算器36cでは、ノルムVn1を補正量Vncorによって補正する。操作信号生成部38では、インバータの入力電圧(電源電圧VDC)及びノルムVnに基づき算出される電圧利用率に応じた操作信号波形を検索する。
(もっと読む)
回転機の制御装置
【課題】弱め界磁制御時、高トルク領域においてモータジェネレータの制御性が低下すること。
【解決手段】弱め界磁制御部200は、q電流操作部210とd軸電流操作部220とを備えている。q軸電流操作部210は、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として指令電流iqrを設定し、実電流iqを指令電流iqrにフィードバック制御するための操作量として指令電圧vdrを設定する。一方、d軸電流操作部220では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として指令電流idrを設定し、実電流idを指令電流idrにフィードバック制御するための操作量として指令電圧vdrを設定する。q電流操作部210による制御とd軸電流操作部220による制御とは、トルクに応じて切り替えられる。
(もっと読む)
交流モータの制御装置
【課題】
本発明は、交流モータの制御装置に係り、特に、モータの駆動状態に応じて変化する交流モータの電気定数を簡便に設定し、それをモータ制御に用いることを可能とした交流モータの制御装置を提供することを目的とする。
【解決手段】
モータの電気定数を演算するモータ定数演算部を備え、直交する2つの軸のうち一方の軸上で定義される電気定数の設定値を、同一の軸上で定義される状態変数を用いた関数式で補正し、かつ他方の軸上で定義される状態変数を用いた関数式で補正することで達成できる。
(もっと読む)
電気駆動機械
【課題】拡張された機能範囲を備えた駆動およびエネルギー伝達機能を有する電気駆動機械を提供する。
【解決手段】駆動およびエネルギー伝達機能のための巻線および/または永久磁石を有する固定子および回転子からの共通な能動部分を備えた電気機械(15)が、位置検出を僅かな追加費用にて可能にするために、エネルギー伝達のために存在する回転子巻線の利用を可能にする。このために、エネルギー伝達機能のための電気エネルギー取り出しに用いられる回転子における電力変換器が、交流電圧を回転子巻線に印加し、交流電圧が固定子において検出され、回転子位置の検出を可能にする。
(もっと読む)
リラクタンス型同期電動機の制御装置
【課題】電動機回転子の磁気的な構造および材質の磁気特性に起因する電流−トルクの非線形領域を回避できる安定した制御性を持つ制御装置を提供する。
【解決手段】
制御装置は、上位制御装置から指令されるトルク指令値に比例するq軸電流振幅値を演算するq軸電流演算部と、前記トルク指令値に比例するd軸電流振幅値を演算するd軸電流演算部と、回転子速度に応じて変化するq軸電流係数、d軸電流係数をそれぞれ演算する速度係数演算部と、q軸電流振幅値とq軸電流係数、d軸電流振幅値とd軸電流係数をそれぞれ乗じることでq軸電流指令値およびd軸電流指令値とを算出し、d軸電流指令値に基づいた三角形補償関数又は台形補償関数によりq軸電流補償値を演算するq軸電流補償値演算部と、算出されたq軸電流補償値をq軸電流指令値に加算した補償後q軸電流指令値を出力する出力部と、を備える。
(もっと読む)
産業機械の制御装置
【課題】インバータが制御可能な最大電圧や電流を考慮でき、また、高効率に運転でき、機械の作業能力をより高めることができるサーボモータ駆動方式の産業機械の制御装置を提供すること。
【解決手段】交流モータ1と、交流モータ1を駆動するインバータ14と、交流モータ1が駆動する機械の作業時のエネルギーを確保する電気的エネルギー蓄積装置13と、交流モータ1を制御するための制御装置を持つ産業機械の制御装置であって、インバータ14の直流側の直流電圧と、交流モータの1トルク指令またはトルク指令相当信号と、交流モータ1の回転速度に応じて交流モータ1を駆動する無効電流を零または負に制御する。
(もっと読む)
電動機制御装置及びその制御方法
【課題】 電圧、電流の精度及び電動機の電気定数の設定誤差に対し、ロバストに電動機の回転位置角を推定することが可能な電動機制御装置及びその制御方法を提供する。
【解決手段】 電動機(24)への電圧指令に交流電圧指令を重畳する電圧重畳器(25)と、電動機電流を位相指令と同位相成分(γ軸電流)と90度進んだ位相成分(δ軸電流)に座標変換する電流座標変換器(26)と、δ軸電流から交流電圧指令と同じ周波数成分の電流を抽出する電流抽出器(27)と、抽出された電流を用いて位相補正量を演算し位相指令に補正する位相補正器(28)を備える。
(もっと読む)
交流電動機の回転子位相速度推定装置
【課題】 本発明は、交流電動機のための駆動制御装置に使用される、非真円軌跡をもつ高周波信号を印加する高周波信号印加法に基づく回転子位相速度推定装置において、応答高周波信号の軌跡が直線的でない場合にも、換言するならば中〜高速域においても、推定の速応性を低下することなく、更には汎用性の高い形で、回転子位相あるいはこれと微積分の関係を有する回転子速度を推定できる回転子位相速度推定装置を提供することにある。
【解決手段】 準同期座標系上で、非真円形軌跡をもつ高周波信号を交流電動機へ印加するようにした高周波信号印加手段10−1と、応答高周波信号正相成分相当値と応答高周波信号逆相成分相当値の少なくとも何れかを抽出する正逆相成分抽出手段10−2と、正逆相成分相当値の何れか1つを用いて、準同期座標系の位相と回転位相推定値あるいは回転子速度推定値の少なくとも1つとを生成する回転子位相速度生成手段10−3とより、回転子位相速度推定装置を構成し、課題を解決した。
(もっと読む)
1 - 20 / 37
[ Back to top ]