
Fターム[5H505JJ30]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | その他 (49)
Fターム[5H505JJ30]に分類される特許
1 - 20 / 49
モータ制御装置
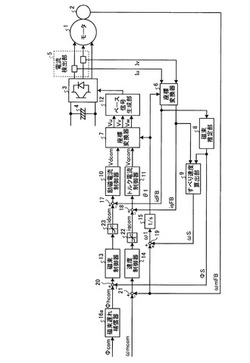
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
モータ制御装置及びモータ駆動システム、並びにモータ制御方法

【課題】モータの制御を不安定にすることなく、モータを駆動するための電力に重畳する基本波成分を除去する、ことを目的とする。
【解決手段】モータ制御装置2は、3相/2相変換部12によって、電流センサ7によって検出された3相交流測定電流を2相交流測定電流へ変換し、2相測定交流電流に重畳する基本波成分を含む周波数帯域を阻止帯域とし、交流モータ4の回転数に基づいて該阻止帯域が変化するノッチフィルタを有する可変ノッチフィルタ部13によって、該阻止帯域の周波数成分を減衰させる。そして、モータ制御装置2は、電流PI制御部14、及び極座標/3相変換部15によって、交流モータ4を駆動させる3相交流電力指令値を、可変ノッチフィルタ部13から出力された2相交流測定電流と電流指令値に基づいて生成する。
(もっと読む)
高圧多重インバータ装置
【課題】高圧多重インバータ装置において、1アーム素子破損でも確実に欠相を検出する。
【解決手段】多重変圧器、多重変圧器により絶縁し給電され、三相の各相がスイッチング素子を備えたN段のセルインバータ、N段のセルインバータにより電力供給される三相電動機、N段のセルインバータのスイッチング素子を点弧する制御装置から構成された高圧多重インバータ装置において、記制御装置は、三相電動機に与える三相の出力電流から、トルク電流成分と励磁電流成分を求めて帰還信号とし、速度指令から求めたトルク電流と励磁電流の目標値に帰還信号を制御し、検出したトルク電流成分を異なった遅れ時間を生じさせる一次遅れ回路に導き、その信号の差分により、セルインバータを構成するスイッチング素子の欠相を検出する欠相検出部を備える
(もっと読む)
電気車制御装置
【課題】粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる電気機関車の電気車制御装置を提供すること。
【解決手段】速度ゼロから切換速度に達するまでは速度センサ付ベクトル制御器CAによって加速制御を行い、これと併行して速度ゼロから速度センサレスベクトル制御器CBも動作させて主電動機1の電圧・電流から推定速度を演算する。この推定速度と速度センサ2から得た速度とから空転検知用速度演算器5により空転検知に用いる速度を演算し、この速度を各動輪速度とみなし、その最小値を基準速度に設定して各動輪速度の差速度によって空転検知器6により空転検知を行いながら加速制御を行う。この加速制御中の平均加速度と機関車の平均牽引力から牽引質量推定器9で牽引質量を推定し、閾値演算器8において空転検知の閾値を設定する。列車速度が切換速度以上になった後は、この閾値を用いて軸加速度による空転検知を行う。
(もっと読む)
電子装置
【課題】直流電源の電圧が変化しても、抵抗回路が異常であるか否かを正しく判定することができる電子装置を提供する。
【解決手段】制御回路13は、抵抗電圧検出回路131と、高電圧バッテリ電圧検出回路132と、マイクロコンピュータ135とを備えている。マイクロコンピュータ135は、高電圧バッテリ電圧検出回路132の検出した高電圧バッテリB10の電圧に基づいて、予め設定されている第1及び第2異常判定閾値の値を変更する。そして、抵抗電圧検出回路131の検出した抵抗121の電圧を変更した第1及び第2異常判定閾値と比較し、抵抗回路12が異常であるか否かを判定する。高電圧バッテリB10の電圧が変化しても、そのため、第1及び第2異常判定閾値を適切な値に変更することができる。従って、高電圧バッテリB10の電圧が変化しても、抵抗回路12が異常であるか否かを正しく判定することができる。
(もっと読む)
電力変換回路の制御装置
【課題】複数個のチョッパ回路部を備えるマルチフェーズコンバータについて、各チョッパ回路部のコイルを流れる電流の増減周期の出現タイミングを均等化することが困難なこと。
【解決手段】マスタ相の電流の変化速度の反転タイミング間の時間間隔T1を計測する。第m(m=2〜n)のスレーブ相については、マスタ相のコイルを流れる電流がゼロとなるタイミングから、「T1(m−1)/n」だけ遅延したタイミングをコイルを流れる電流がゼロとなる目標タイミングTMに設定する。実際のタイミングT(m)を目標タイミングTMにフィードバック制御すべく、スレーブ相のスイッチング素子のオン時間を操作する。
(もっと読む)
電力用半導体装置
【課題】ハイサイド電源電圧を得るためのブートストラップ回路を備える電力用半導体装置において、制限抵抗の許容電力を小さくし、発熱の低減および装置の小型化を図る。
【解決手段】パワー半導体装置は、インバータのハイサイドスイッチング素子Q2Wを駆動するハイサイド駆動部20に供給するハイサイド電源電圧を生成するブートストラップ回路を備える。ローサイドスイッチング素子Q1Wは、ブートストラップコンデンサ3の初期充電のために、電源の投入直後の所定期間にオン状態にされる。この所定期間の前半はローサイドスイッチング素子Q1Wを間欠的にオンにして、ブートストラップコンデンサ3の完結的な充電を行う。また後半はローサイドスイッチング素子Q1Wをオン状態に固定して、ブートストラップコンデンサ3の連続充電を行う。
(もっと読む)
電力変換装置及び電力変換装置の異常検出方法
【課題】スイッチング素子等の回路部品の機能低下による電力変換装置の異常を検出することのできる電力変換装置の異常検出方法を提供する。
【解決手段】インバータ回路13から三相誘導電動機16に出力される三相交流電力のU相電流、V相電流及びW相電流を電流計17,18,19により計測し、電流計17〜19の各出力から三相交流電力のU相電流波形歪率、V相電流波形歪率及びW相電流波形歪率を求めた後、U相電流波形歪率、V相電流波形歪率及びW相電流波形歪率を予め定めた基準値と比較し、各電流波形歪率の何れかが基準値より大きい値のときに異常有りと判定して電力変換装置10の異常を検出する。
(もっと読む)
電動機駆動装置及び角度情報伝送処理方法
【課題】少ない信号線で且つ確実に角度情報を制御部に伝送することが可能となる電動機駆動装置及び角度情報伝送処理方法を提供する。
【解決手段】回転子の磁極位置を検出する位置検出器3を取り付けた同期電動機1と、この同期電動機を駆動する電力変換器2と、位置検出器3から得られる速度帰還と速度基準との速度偏差を減少させるように電流基準を生成する速度制御部5と、位置検出器3の位置信号から角度情報伝達手段を介して電流基準の位相を決定し、電力変換器2の出力電流が電流基準に追従するように電力変換器1を制御する電流制御部6とを備えた構成とする。角度情報伝達手段は、位置検出器3の位置信号から磁極位置に相当する位相パルス信号を生成するパルス変換手段54と、この位相パルス信号を受信し、PLL回路によって位相パルス信号に同期した状態で電流制御に用いる第1の位相信号を得る復調手段63とから成る。
(もっと読む)
電力変換装置
【課題】インバータ回路を構成するハイサイドのFETの駆動に必要なゲート電圧を確保するとともに、ノイズを抑えることができる電力変換装置を提供する。
【解決手段】モータ制御装置1は、FETを3相ブリッジ接続して構成されるインバータ回路と、ハイサイドのFETの駆動に必要な電圧を出力するチャージポンプ回路19とを備えている。チャージポンプ回路19は、コンデンサ190a〜192a及びダイオード190b〜192bからなる基本回路190〜192と、チャージポンプ制御回路198とを備えている。チャージポンプ制御回路198は、バッテリB1の出力電圧Vbの電圧が電圧閾値を超えると、ハイサイドのFETの駆動に必要なゲート電圧を出力できる範囲内で、駆動する基本回路の段数を3段から2段に減少させる。これにより、ハイサイドのFETの駆動に必要なゲート電圧を確保するとともに、コンデンサの充放電に伴って発生するノイズを抑えることができる。
(もっと読む)
電動機の制御装置及び車両
【課題】ゲート抵抗の故障に起因するインバータ回路の短絡故障を未然に防止する電動機の制御装置を提供することである。
【解決手段】インバータ回路は、並列接続された複数の抵抗から構成され、スイッチング素子の各ゲート部に接続されたゲート抵抗部を有する。各相のアームの正極側及び負極側にスイッチング素子が設けられた複数相のインバータ回路を介して直流電源から電力が供給される電動機の制御装置は、ゲート抵抗部の故障を検出するゲート抵抗故障検出部と、ゲート抵抗故障検出部によってゲート抵抗部の故障が検出されたとき、電動機の動作を制限する制御部とを備える。
(もっと読む)
電源回路およびその制御回路
【課題】昇圧チョッパ回路を用いた力率改善もしくは高調波抑制回路において、部分スイッチング動作によるスイッチング損失の低減と直流電圧の安定制御化(適用システムの安定制御化)の両立である。
【解決手段】平滑回路に接続された負荷の状態を示す負荷状態情報を生成する負荷状態生成手段と、負荷状態情報を用いて第1の係数を補正する係数補正手段とを備えた昇圧比一定制御方式を用いた電源回路において、電源電圧や負荷の変化に応じて、昇圧比を補正もしくは変更することを特徴とする。
(もっと読む)
交流電動機の制御装置
【課題】トルク指令値(電流指令値)が急峻に変化した場合においても、電流応答性の劣化を抑制でき、かつ、過変調領域でも安定で高い電流応答性を確保する。
【解決手段】非干渉制御器22は、電流指令値Id*、Iq*、d軸インダクタンスLd、q軸インダクタンスLq、モータ36の角速度ωを用いてd軸干渉成分vd_i、q軸干渉成分vq_iを算出する。非干渉誤差補正器18は、d軸電流指令値Id*とd軸電流値Idとの偏差、q軸電流指令値Iq*とq軸電流値Iqとの偏差、d軸インダクタンスLd、q軸インダクタンスLq、角速度ωに応じて、相互干渉成分の誤差を算出して相互干渉成分を補正する。
(もっと読む)
交流電動機の制御装置及びその制御方法
【課題】 速度推定器そのものを改善して、電動機の駆動周波数がゼロを含む低い領域においても安定に位置と速度を推定し、電動機のトルク制御、速度制御が実現可能な交流電動機の制御装置及びその制御方法を提供する。
【解決手段】 電動機磁束の固定子周波数を演算する固定子周波数演算器(12)と、電動機磁束、推定電流及び電動機電流を用いてトルク誤差を演算するトルク誤差演算器(13)と、固定子周波数及びトルク誤差を用いて速度を推定する速度推定器(14)を備え、速度推定器(14)は、トルク誤差をゼロとするように構成された比例制御器(23)の出力と、トルク誤差の高域成分を除去する適応フィルタ(24)を備える。
(もっと読む)
モータ駆動用電源装置
【課題】 誘起電圧が低いモータの低速時においても回生電流を回収することができ、且つ、取り出したエネルギを殆ど再利用することができるモータ駆動用電源装置を提供すること。
【解決手段】 主バッテリと、補助バッテリと、主バッテリからの電力をモータに供給して駆動するドライバと、補助バッテリに対して直列又は並列に接続された大容量コンデンサと、補助バッテリに電流を供給して充電するとともに大容量コンデンサに電流を供給して蓄電する充電手段と、主バッテリからの電力をドライバを介してモータに供給する「力行」とモータからの電気エネルギを回収する「回生」との切換を制御するとともに「回生」においてモータの速度が十分に早い場合には上記ドライバを介して主バッテリに回生電流を流しモータの速度が遅くなった場合には充電手段を介して大容量コンデンサに回生電流を流すように制御する制御手段と、具備したもの。
(もっと読む)
同期モータ駆動制御装置
【課題】指令電流生成手段に用いられるニュートン法による演算時間を短縮することにより、同期モータの駆動制御を高精度に行うことのできる同期モータ駆動制御装置を提供する。
【解決手段】曲線CとId軸とが交わる点を算出する際、図3(b)に示すように、曲線C上の点a1(Id0,f(Id0))から引かれた接線とId軸とが交わる点b1(Id1,0)を求め、演算値Id0と演算値Id1との差(Id1−Id0)が所定値Aよりも小さい場合、演算値Id0に所定値Aを加えた値(Id0+A)を数式(3)のIdnに書き換える。その後、曲線C上の点c1(Id+A,f(Id+A))から引かれた接線とId軸とが交わる点を点d1´(Id1´,0)とし、順次演算を行う。曲線Cの傾きが急な部分における処理回数を削減して、演算時間を大幅に短縮することができる。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】永久磁石形同期電動機に高周波交番電圧を印加した時に、適切な大きさの高周波電流を流して磁極位置を正確に演算可能とする。
【解決手段】x軸高周波電流振幅を検出するバンドパスフィルタ24と、x軸高周波電流振幅から電気角360度周期で脈動する成分を検出し、かつ、d軸高周波電流振幅を検出するフーリエ級数演算器31と、d軸高周波電流振幅指令値にd軸高周波電流振幅検出値が一致するように、第1の高周波電圧振幅指令値Vh**を演算する高周波電流調節器32と、電動機80に印加する高周波電圧を演算するための第2の高周波電圧振幅指令値Vh*を第1のγ軸高周波電圧振幅指令値Vγh**から演算し、かつ、角度誤差演算ゲインKθerrをx軸高周波電流振幅検出値の脈動成分から演算する制御定数演算器33と、を備える。
(もっと読む)
電源回生機能を有するサーボアンプ
【課題】過剰なスペックの装置構成を避けることが可能となり、装置のサイズの最適化(小型化)、コスト削減、省エネルギー化を達成できる電源回生機能を有するサーボアンプを提供すること。
【解決手段】交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12とが一体化して構成され、交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12とはDCリンク16接続により一体的に構成されている。DCリンク16は例えばショートバーやネジ締めによって構成する。また、パワー半導体15はヒートシンク17表面に配置されている。そして、この交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12の一体的構成は、パワー半導体15を挟むようにヒートシンク17上に配置される。交直変換部分(コンバータ部分)11は最適なスペックのものを選択して取り付けることができる。
(もっと読む)
サーボモータ制御システム
【課題】トルク指令または電流指令を分配する中継装置を用いないサーボモータ制御システムの提供。
【解決手段】数値制御装置1で生成した1つのトルク指令または電流指令をシリアルバス6を通して複数のサーボアンプ5に送信する。複数のサーボアンプ5は受信した同一のトルク指令または電流指令に基づいてモータを駆動する第1の形態と、数値制御装置1で生成した複数の前記トルク指令または電流指令をシリアルバス6を通して複数台のサーボアンプ5に送信し、サーボアンプ5は受信したそれぞれのトルク指令または電流指令に基づいてモータを駆動する第2の形態と、を接続されているサーボアンプ毎に選択する手段を有することを特徴とするサーボモータ制御システム。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】回転子が回転している場合にも磁極位置を高精度に演算すると共に、電動機や電力変換器等を破損する恐れをなくした永久磁石形同期電動機の制御装置を提供する。
【解決手段】振幅とパルス幅とが等しく、極性が互いに異なる2つのパルス電圧からなる矩形波の交番高周波電圧を、角度演算器20、x軸高周波電圧演算器21、高周波電圧座標変換器22、加算器23a,23bを用いてPMSM80に対し複数のベクトル方向に印加する。電流検出器11u,11w、電流座標変換器14、バンドパスフィルタ30、高周波電流座標変換器31を用いて、前記交番高周波電圧と平行な方向の高周波電流を検出する。フーリエ級数演算器32は、検出した高周波電流から、交番高周波電圧のベクトル方向に依存して1周期で変化する成分としてのフーリエ級数1次成分を抽出し、初期磁極位置演算器33は、前記1次成分から磁極位置を演算する。
(もっと読む)
1 - 20 / 49
[ Back to top ]