
Fターム[5H505LL52]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 負荷、荷重 (24)
Fターム[5H505LL52]に分類される特許
1 - 20 / 24
インバータ装置及びインバータ装置のティーチング方法
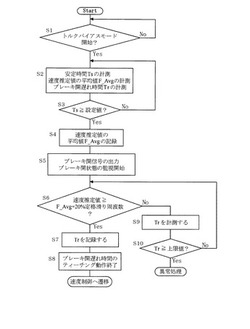
【課題】機械式ブレーキを備えるモータ駆動システムについてブレーキ開遅れ時間を得るためのティーチング動作を行う場合に、より精度が高い結果を得る。
【解決手段】実施形態のインバータ装置によれば、設定手段は、制御部がモータの起動に伴って実行するブレーキの開制御をモータの可変速制御と連携して行なう際に、インバータ回路を介して検出される相電流に基づき演算により推定したモータの回転周波数の変化に基づき機械式ブレーキの開制御に使用されるブレーキ制御データを設定する際に、モータが停止して機械式ブレーキが閉じた状態で出力トルクを上昇させるよう制御部に指令を与え、推定されるモータの回転周波数の平均値を求め、その平均値に前記回転周波数の所定の変化分を加えたものを判定周波数として設定する。そして、ブレーキ開指令を出力するとブレーキ開遅れ時間の計測を開始し、モータの回転周波数が判定周波数以上になるまでの時間をブレーキ開遅れ時間として計測し当該時間を記録する。
(もっと読む)
電動機制御方法およびその装置

【課題】周期的負荷に対して電動機の回転速度変動を抑制するとき、回生電力の活用により省電力化を達成する。
【解決手段】交流電源1をコンバータ2に供給して直流電源を得、平滑用コンデンサ3で平滑化し、インバータ4により交流電源化して電動機5に供給する。電動機5は周期的な負荷変動を呈する圧縮機6を駆動する。コンバータ2の出力端子間に回生抵抗7を接続している。インバータ4のパワーデバイスの電流最大値をオーバーしないように、インバータ4から電動機5へ供給する電圧または電流を制御する。
(もっと読む)
揚重装置およびその制御方法、これを応用した機械式立体駐車場
【課題】モータの回生電力を極力無駄なく蓄電して省エネルギに貢献する。
【解決手段】車両2を上昇させる力行運転と、車両2を下降させて回生電力を発生させる回生運転とを行うモータ17と、電源手段23と、回生電力の蓄電手段32と、力行・回生運転の種別が入力される操作手段37と、蓄電手段32の蓄電量を検出する蓄電量検出手段33,34と、運転種別信号および蓄電量信号に基づきモータ17の制御を行う制御手段36と備え、制御手段36は力行運転時に電源手段23よりも蓄電手段32の電力を優先させてモータ17に供給し、所定の力行運転動作を行うにあたり、蓄電手段32の蓄電量が不足な場合には、電源手段23の電力を併用してモータ17に供給することにより蓄電手段32の蓄電量不足を補うように制御する。また、蓄電手段32の電力不足が見込まれる場合には、力行運転の開始前に電源手段23により蓄電手段32を補充電するように制御する。
(もっと読む)
エレベータの制御装置
【課題】多巻線モータを備えたエレベータにおいて、運転に支障を与えることなく、消費電力を極力抑えてモータを駆動して省エネ化を実現する。
【解決手段】2巻線型のモータ20を備えたエレベータにおいて、乗りかご23とカウンタウェイト24が釣り合ったバランスロード状態であれば、インバータ13a,13bの一方を使用してモータ20を駆動する。これにより、乗りかご23の運転に支障を与えることなく、その間の消費電力を極力抑えて省エネ運転できる。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
電動式建設機械
【課題】簡素な構成でオートアイドル制御を行うことができ、且つ制御調整の負担を軽減することができる電動式建設機械を提供する。
【解決手段】インバータ装置29は、通常モード中、回転数指示装置28で指示された目標回転数に対応する閾値を読込み、永久磁石同期モータ30の一次電流が閾値より小さくなる状態で所定時間が経過したか否かを判定し、これによって全ての油圧アクチュエータが動作していないような低負荷状態であるか否かを判断する。そして、永久磁石同期モータ30の一次電流が閾値未満となる状態で所定時間が経過したと判定された場合は、通常モードからアイドルモードに切替えて、ローアイドル回転数となるように、永久磁石同期モータ30の印加電圧を制御する。
(もっと読む)
エレベータの制御装置
【課題】半導体素子の耐電圧を小さくしたり、スナバ回路の省力化を図りつつ、半導体素子の発熱を軽減することができるエレベータの制御装置を提供する。
【解決手段】エレベータのかごを駆動するモータに接続され、複数の半導体素子をスイッチングすることにより、供給された直流電力を交流電力に変換して、モータに供給するインバータと、複数の半導体素子のスイッチングを制御するスイッチング制御装置と、を備え、スイッチング制御装置は、複数の半導体素子のうち、少なくとも二つの半導体素子を予め設定された時間内にスイッチングさせるときは、少なくとも二つの半導体素子のスイッチング速度を通常速度よりも遅くするとともに、少なくとも二つの半導体素子以外の半導体素子のスイッチング速度を通常速度に維持する構成とした。
(もっと読む)
永久磁石同期電動機システム及びその界磁制御方法
【課題】簡単な構成で高精度かつ低コストで広範囲の界磁制御が可能な永久磁石同期電動機システム及びその界磁制御方法を提供する。
【解決手段】電圧及び周波数が可変な電源15を備え、永久磁石同期電動機11の基底速度を超えた高速運転の際に、永久磁石同期電動機11の永久磁石の磁束を弱める向きに、永久磁石同期電動機11の固定子側からd軸電流を流して界磁弱め制御を行う制御装置12を有する永久磁石同期電動機システム10において、永久磁石の磁束は、基底速度に対応する定格磁束より小さい値に設計され、制御装置12は、基底速度以下の低速度領域で、d軸電流と直交するq軸電流の値を定格磁束に対応する定格q軸電流の値より大きくして、要求されるトルク特性を発生させる第1の速度制御系13と、高速度領域で、d軸電流及びq軸電流の値をそれぞれ調整して要求される出力特性を発生させる第2の速度制御系14とを有する。
(もっと読む)
モータ駆動装置
【課題】回転位置センサを用いない安価なモータ駆動装置において、モータの起動時など比較的モータの回転数が低い場合でも正確に脱調判定を行う。
【解決手段】目標電流値、または、目標電流となるように駆動されたモータの駆動電流値とのいずれか一方と回転数指令値とを入力し、同回転数指令値に比例するモータの回転による誘起電圧と、固有のインピーダンス特性を持ったモータに駆動電流が流れた時に発生するインピーダンス特性電圧とから、モータの脱調の有無を判定するための脱調判定電圧閾値を出力する脱調判定電圧閾値算出手段を設け、電圧振幅指令値と脱調判定電圧閾値とを比較して、電圧振幅指令値が脱調判定電圧閾値よりも小さい場合、モータが脱調していると判定する。
(もっと読む)
車両の負荷演算装置
【課題】
車両の負荷演算装置に関し、負荷装置がエンジン出力に与える負荷量を高頻度で演算することができるようにする。
【解決手段】
エンジンの出力を消費するn個の負荷装置それぞれが消費するエンジンの出力を負荷量として演算する負荷演算装置において、第k番目の負荷装置を含めた複数の負荷装置が作動している第一作動状態が検出されたとき、この第一作動状態に対応したエンジンの出力(第一出力データ)を記憶するとともに、複数の負荷装置のうち前記第k番目の負荷装置を除く負荷装置の少なくとも1つが作動している第二作動状態が検出されたとき、この第二作動状態に対応したエンジンの出力(第二出力データ)を記憶する記憶手段(3)と、第一出力データと第二出力データとを用いて第k番目の負荷装置の負荷量を演算する演算手段(4)とを備えるように構成する。
(もっと読む)
電動機の制御装置及びこれを搭載する車両並びに電動機の過熱の報知方法
【課題】電動機の負荷率に応じて電動機が過熱に至る報知をより適正に行なう
【解決手段】要求負荷率Pm*が大きいときにはモータ温度Tmが比較的低い温度でも過熱に至ると判定すると共に要求負荷率Pm*が小さいときにはモータ温度Tmが比較的高い温度でも過熱に至らないと判定するモータ過熱警告判定用マップに対して要求負荷率Pm*とモータ温度Tmとが過熱警告範囲に属するか否かを判定し(S160,S170)、過熱警告範囲に属するときに過熱警告ランプを点灯する(S190)。これにより、要求負荷率Pm*に応じたモータ温度Tmを用いてモータが過熱に至ることを報知する過熱警告ランプを点灯することができる。
(もっと読む)
エレベーターの制御装置
【課題】半導体素子を含む電力変換装置を備えたエレベーターの制御装置において、前記半導体素子の寿命を延ばす。
【解決手段】エレベーターかご9を運転する交流電動機6を駆動制御するインバータ4を有するエレベーターの制御装置で、エレベーターかご9の負荷を検出するかご負荷検出装置11と、かご負荷検出装置11により検出されるかご負荷とエレベーターの複数の運転パターンによって交流電動機6の加速度を指定する加速度指定テーブル7とを備え、加速度指定テーブル7に指定された交流電動機6の加速度は、インバータ4に含まれる半導体素子のジャンクション温度リップルあるいはベース板温度リップルにより規制される。
(もっと読む)
電動パワーステアリング装置
【課題】逆入力応力の印加により生ずる操舵系の振動を効果的に抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、操舵系の状態を示す信号としてのピニオン角から、転舵輪に対する逆入力応力の印加により生ずる操舵系の振動に対応する周波数成分を抽出し、その実効値としてパワースペクトルSpを演算する(ステップ201)。そして、このパワースペクトルSpが所定の閾値Sth以上である場合(Sp≧Sth、ステップ203:YES)には、そのモータ制御を、モータの回転を規制する回生ブレーキ制御に切り替える(モータ回転規制制御、ステップ204)。
(もっと読む)
油圧ユニットおよび油圧ユニットにおけるモータの速度制御方法
【課題】油圧ポンプの負荷の変動に対するモータの回転速度の追従性を向上させることが可能な技術を提供する。
【解決手段】油圧ユニットは、モータ(15)に電力を供給するインバータ(14)と、油圧ポンプ(16a)の負荷を検出する負荷センサ(17)と、モータ(15)の回転速度を検出する回転センサ(21)と、モータ(15)の目標回転速度を表す速度指令値と前記モータ(15)の回転速度との偏差をゼロに収束させるように、電流指令値を演算する電流指令値演算手段(12)と、油圧ポンプ(16a)の負荷に基づいて、電流指令値を補正する補正手段(18a)と、補正後の電流指令値に基づいて、インバータ(14)に制御信号を出力する制御信号生成手段とを備える。
(もっと読む)
モータ制御装置、及びモータ制御システム
【課題】オンライン状態で且つ少ない演算量で、制御対象の剛体特性と共振特性との双方を同定する。
【解決手段】連結軸3を介して負荷2と連結したモータ1と、前記モータを駆動する電力変換器4と、目標指令値及び、前記モータに流れるモータ電流に基づいて前記電力変換器を制御するモータ制御装置100とを備えるモータ制御システム200であって、モータ制御装置は、モータのモータトルク値とモータ回転速度検出値とを入力信号にして、制御の制御パラメータを自動調整するオートチューニング部11を備え、オートチューニング部は、モータと連結軸と負荷の機械系を「剛体モデル」と「共振モデル」との直列接続モデルとして捉え、各モデルを構成するパラメータを別々に同定するパラメータ同定手段を有する。
(もっと読む)
電磁サスペンション装置
【課題】電源を効率的に充電することができ、ストローク速度が中高速領域でも充分な荷重を発生可能な電磁サスペンション装置を提供することである。
【解決手段】 一方部材1と、一方部材1に対し相対運動を呈する他方部材2と、該相対運動1を少なくとも抑制可能なモータMとを備えた電磁サスペンション装置において、モータMの巻線12に接続された可変抵抗r1,r2,r3を備え、可変抵抗r1,r2,r3の抵抗値を調整して、モータMを短絡した状態におけるストローク速度と荷重との関係である短絡特性Tを制御することを特徴とする。
(もっと読む)
洗濯機あるいは洗濯乾燥機のモータ駆動装置
【課題】モータを高速回転時にセンサレス正弦波駆動することにより低騒音化する。
【解決手段】直流電源2の直流電力をインバータ回路3により交流電力に変換し、回転ドラム5あるいは撹拌翼6を駆動するモータ7と、モータ7のロータ磁極位置を検知する位置検知手段70とモータ電流を検知する電流検知手段71と制御手段9により構成し、低速では位置検知手段70の出力信号により回転制御し、高速では電流検知手段71の出力信号により回転制御する。
(もっと読む)
エレベータ電力システム
電力システム(10)は、各々が複数のエレベータ(12a、12b、12c)のうちの1つの移動を制御するものである、複数の巻上げモータ(18a、18b、18c)を作動させる。電力システム(10)は、電力バス(11)および、電力バス(11)にまたがって接続されたコンバータ(22)を含み、該コンバータはAC電源(20)からの交流(AC)電力を直流(DC)電力に変換して、DC電力を電力バス(11)に送る。電力システム(10)はまた、電力バス(11)にまたがって接続された複数のインバータ(26a、26b、26c)を含む。各々のインバータ(26a、26b、26c)は巻上げモータ(18a、18b、18c)に接続され、巻上げモータ(18a、18b、18c)がモータとして作動しているときは、電力バス(11)からのDC電力をAC電力に変換することによって巻上げモータ(18a、18b、18c)を駆動するように作動可能である。さらに各々のインバータ(26a、26b、26c)は、巻上げモータ(18a、18b、18c)が発電しているときにモータによって発生されたAC電力をDC電力に変換して、DC電力を電力バス(11)に送るように作動可能である。制御装置(31)は、コンバータ(22)およびインバータ(26a、26b、26c)の作動を制御することによって電力バス(11)の電力を管理して、コンバータ(22)および発電中の巻上げモータによって電力バス(11)に送られた電力で、モータとして作動中の巻上げモータを駆動する。  (もっと読む)
(もっと読む)
電気掃除機及び電気掃除機の吸引力制御方法及びそれを実行するためのプログラム
【課題】位相制御において発生する電源高調波の大きさをJIS C6100−3−2の限度値―高調波電流発生限度値に定める限度値以下に低減させ、且つ大きな負荷の制御を可能とする
【解決手段】位相制御により吸引力制御をおこなう電気掃除機において、操作部4の設定値とセンサー部5の値を比較して最適な基準電力を得る点弧角を出力する点弧角制御部7の点弧信号を、少なくとも1つの半波の点弧位相が他の半波と異なる半波で構成される奇数個の半波から基準電力を得るように点弧角を変化させる奇数波制御部10により偏移させた点弧信号を用いて制御することで、高調波の分布を分散させながら低減させ、制御可能な負荷を大きくする。
(もっと読む)
エレベータ制御装置とその制御方法
【課題】起動補償トルクを簡単に補正でき、エレベータを乗り心地よくするエレベータ制御装置とその制御方法を提供する。
【解決手段】PWMサイクロコンバータ1と、三相出力の電流信号を生成する電流検出器2と、位置信号を生成する位置検出器6と、モータブレーキ12と、乗りかご9の荷重信号を生成する荷重センサ11と、PWMサイクロコンバータ1を制御する制御コントローラ3とを有するエレベータ制御装置において、制御コントローラ3は、位置信号から速度信号を生成する速度信号生成器と、速度指令と速度信号から第1トルク指令を生成する速度制御器と、トルク指令と電流信号から電圧指令を生成する電流制御器と、電圧指令からPWMサイクロコンバータ1のゲート信号を生成するゲート信号生成器と、荷重信号から起動補償トルクを生成する起動補償トルク生成手段とを備えるようにした。
(もっと読む)
1 - 20 / 24
[ Back to top ]