
Fターム[5H560BB08]の内容
無整流子電動機の制御 (40,007) | 電動機の構造 (6,076) | 電機子巻線 (3,737) | △結線 (43)
Fターム[5H560BB08]に分類される特許
1 - 20 / 43
モータ電流検出装置、モータ制御装置、及び電動工具
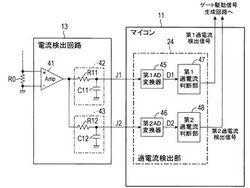
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
モータ制御装置

【課題】モータを素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10に供給する電圧で規定された制御条件、又は、3相モータ10に供給する電圧及び3相モータ10を制御するPWM信号の周波数の関係で規定された制御条件の少なくともいずれか一方が記憶されてある制御条件記憶部3と、3相モータ10を動力源とするポンプ30で流通させる粘性流体の温度に基づいて、制御条件記憶部3から制御条件を抽出する制御条件抽出部2と、3相モータ10の起動時に、抽出された制御条件に基づくPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、を備える。
(もっと読む)
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
モータ制御装置
【課題】3相モータをスムーズに且つ素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、動作命令及び停止命令に基づいてインバータが有するスイッチング素子に通電して3相モータ7の回転を制御する通電制御部50と、停止命令に基づき、次の動作命令とは無関係に通電制御部50に対して3相モータ7が有する3つの端子のうち予め設定された2つの端子間への通電及び当該通電の停止を指示する通電指示部10と、を備える。
(もっと読む)
ロータ位置検出装置
【課題】モータの回転数を高くした場合でも適切にロータの位置を検出することが可能なロータ位置検出装置を提供する。
【解決手段】ロータ位置検出装置100は、所定の周波数を有するPWM信号でインバータ11が有するスイッチング素子Q1−Q6を制御するPWM制御部1と、PWM信号の1周期分に対応する、3相モータ10が有する各端子41−43の端子電圧において、当該端子電圧と予め設定された基準電圧Vrefとの大小関係を少なくとも2回以上判定する判定部2と、当該判定部2の判定結果に基づいて3相モータ10が有するロータの位置を検出する検出部3と、を備える。
(もっと読む)
センサレスブラシレスモータの駆動装置
【課題】三相独立方式により誘起電圧を減少させることなく検知し回転位置を高精度に検出して低回転駆動を可能にし、かつコストの増加を抑制したセンサレスブラシレスモータの駆動装置を提供する。
【解決手段】電機子巻線の三相の端子95U、95V、95Wに電源電圧Vccを供給する電源回路(インバータ回路2)と、端子の誘起電圧VSwに基づいて回転位置を検出する位置検出回路3と、回転位置に基づき通電時間帯のタイミングを制御する電源制御回路4とを備えるセンサレスブラシレスモータ9の駆動装置1であって、位置検出回路3は、いずれか一相の誘起電圧を選択して出力する切り替えスイッチ33と、いずれか一相の誘起電圧を所定の基準電圧と大小比較して比較結果を出力する比較器34と、比較結果の変化タイミングを以ってロータの基準回転位置を検出する位置検出部37と、を有する。
(もっと読む)
センサレスブラシレスモータの駆動装置
【課題】低回転時であってもロータの回転位置を確実に検出でき、従来よりも低回転駆動を可能にしたセンサレスブラシレスモータの駆動装置を提供する。
【解決手段】電機子巻線の三相の端子95U、95V、95WにPWM方式によりデューティ比を可変とした電源電圧Vccを供給するインバータ回路2と、PWM信号SPを生成するPWM生成回路3と、PWM信号SPの特定位相で動作し端子に誘起される誘起電圧に基づいて回転位置を検出する位置検出回路3と、回転位置に基づき通電時間帯のタイミングを制御するインバータ制御回路4とを備えるセンサレスブラシレスモータ9の駆動装置1であって、インバータ制御回路4およびインバータ回路2における伝達遅延時間に応じてPWM信号SPを遅延させた位置検出用PWM信号PSDを生成するPWM遅延回路6をさらに備え、位置検出回路3は位置検出用PWM信号PSDの特定位相で動作する。
(もっと読む)
車両用電動機の制御装置
【課題】回転センサを用いることなく、コンパクトで安価、かつ信頼性の高い車両用電動機の制御装置を得る。
【解決手段】この発明による車両用電動機の制御装置は、駆動アームの上スイッチング素子により固定子巻線の1つの巻線端子に通電し下スイッチング素子により前記巻線端子とは異なる1つの巻線端子に通電し残りの巻線端子は上スイッチング素子と下スイッチング素子の何れからも通電されない第1の通電状態と、上スイッチング素子により固定子巻線の1つまたは2つの巻線端子に通電し下スイッチング素子により前記1つまたは2つの巻線端子以外の全ての巻線端子に通電する第2の通電状態とを、第1の通電状態にある第1の固定子巻線または第2の固定子巻線における前記残りの巻線端子の電圧に基づいて交互に切り替えるようにしたものである。
(もっと読む)
交流電動モータ及び制御インバータを備える電源装置、及びこの装置の起電力を測定する方法
【課題】モータの複数相の起電力を、直接的に、かつ位置センサを全く用いることなく、読み取ることを可能にする。
【解決手段】交流電動モータ3と、モータ3の相または複数相を制御する制御インバータ5とを備える電源装置に関し、モータ3は、少なくとも1つの相PA,PB,PCの少なくとも1つの巻線に、所定電位に対する電圧を測定するための点Ma,Mb,Mcを有し、測定点Ma,Mb,Mcは、測定点で巻線を第1部分及び第2部分に分割して、これらの2つの部分に発生する起電力の位相が互いにずれるように選択し、かつモータ3は、測定点と所定電位との間の電圧を測定する手段11A;11B;11Cを含んでいる。
(もっと読む)
ブラシレスモータの制御装置
【課題】冷却ファンを駆動するブラシレスモータを極力短い始動時間で良好に始動可能なブラシレスモータの制御装置を提供する。
【解決手段】冷却ファンを駆動するブラシレスモータの制御装置であって、モータの各相コイルに誘導される電圧に基づいてロータの回転位置を検出する回転位置検出部と、モータの始動時に回転位置検出部により検出されたロータの回転位置に基づいて、ロータが所定の第1回転速度より大きく、且つ、第1回転速度より大きな第2回転速度より小さい回転速度で正回転していると判定すると、ロータが目標回転速度となるように、始動時制御から通常時制御に移行して通常通電制御を実行し、ロータが第2回転速度より大きい回転速度で正回転していると判定すると、ロータの回転速度が第2回転速度より小さい所定の回転速度に低下するまで待機する駆動制御部とを備えている。
(もっと読む)
ブラシレスモータの制御装置
【課題】冷却ファンを駆動するブラシレスモータを極力短い始動時間で良好に始動可能なブラシレスモータの制御装置を提供する。
【解決手段】冷却ファンを駆動するブラシレスモータの制御装置であって、ブラシレスモータの各相コイルに誘導される電圧に基づいてロータの回転位置を検出する回転位置検出部と、ブラシレスモータの始動時に、回転位置検出部により検出されたロータの回転位置に基づいてロータの回転状態を判定し、その回転状態によりロータに対するブレーキ制御の要否を判断し、ロータの回転状態が判定できない場合に、ブレーキ制御を行なうことなく、ロータを強制的に回転させる強制転流制御を実行する駆動制御部とを備えている。
(もっと読む)
モータ駆動制御装置並びに空気調和機、換気扇及びヒートポンプタイプの給湯機
【課題】外風によりファンが回転して、当該ファンの回転により発生するモータの起電力からモータ駆動制御装置を保護することができ、モータ巻き線のターン数を増加させることができ、モータ電流を低減することができるモータ駆動制御装置を得る。
【解決手段】ファンを回転させるモータ7を駆動するモータ駆動制御装置であって、直流電圧を交流電圧に変換してモータ7に印加するインバータ回路5と、インバータ回路5を制御してモータ7の運転を制御する制御手段とを備え、インバータ回路5は、モータ7の巻き線の各相の両端毎にスイッチング素子を有し、制御手段は、スイッチング素子のスイッチパターンを制御して、モータ7の運転を制御するものである。
(もっと読む)
電動機駆動装置、および、それを用いた電動パワーステアリング装置
【課題】断線故障箇所を特定可能な電動機駆動装置を提供する。
【解決手段】電源リレー61、62を導通状態となるように制御したとき(S101)、導通状態となるように制御された第1電源リレー61および第2電源リレー62よりもモータ2側に電力が供給されていないと判断された場合(S104:YES)、電源リレー61、62自体の故障ではなく、第1電源リレー61および第2電源リレー62とバッテリ55との間の配線56が断線していると特定する(S105)。これにより、故障箇所を適切に特定することができる。この場合、第1電源リレー61および第2電源リレー62とバッテリ55との間の配線56を交換すればよいので、電動機駆動装置1の分解、精査を行う必要がなく、故障箇所の特定に係る工数を低減することができる。
(もっと読む)
電動パワーステアリング装置
【課題】電力変換器又は巻線の故障時に、運転者の操舵力を安全かつ継続して補助する電動パワーステアリング装置を提供する。
【解決手段】複数のインバータ13、14は、バッテリー18から供給される電流を電動機駆動制御装置6が設定した電流指令値に基づく電流Ia、Ibに変換し、その電流Ia、Ibをそれぞれに対応する三相巻線11、12に供給する。故障検出装置15は、インバータ13、14または三相巻線11、12の故障を検出する。この故障検出装置15が一方のインバータ13または三相巻線11の故障検出をした場合、電動機駆動制御装置6は、電流指令値を正常時よりも低減する。これにより、他方の正常なインバータ14から対応する三相巻線12に供給される電流Ibが低下するので、運転者の操舵を補助する電動機の駆動力が低下する。このため、運転者の操舵力に変化を与え、運転者に故障の発生を気付かせることができる。
(もっと読む)
モータ制御装置
【課題】モータ起動時、応答良くモータ回転駆動制御を開始すると共に、非同期制御が継続することによる異音,回転脱調,停止,過電流等を回避あるいは低減すること。
【解決手段】センサレスブラシレスモータ5と、制御回路2と、駆動TR回路3と、BEMF検知回路4と、を備え、各相コイル5u,5v,5wにて発生する逆起電力の電圧ゼロクロス検出に基づいて取得したモータ回転位置情報により回転駆動制御を行う。このモータ制御装置A1において、比較基準電位回路7とモータ相コイルバイアス回路6を設け、制御回路2は、モータ起動時、全相オープンと設定デューティ駆動とを繰り返すクローズドループ制御を行い、全相オープン中における電圧ゼロクロス検出に基づき、センサレスブラシレスモータ5の回転状態検知(正回転・停止・逆回転)を実行し、回転状態検知による判定結果に応じ、センサレスブラシレスモータ5が正回転となる位相による転流制御へ移行するモータ起動制御手段(図2)を有する。
(もっと読む)
永久磁石電動機の駆動装置、密閉型圧縮機、および冷凍サイクル装置
【課題】 負荷の大きさにかかわらず、回転子における磁束の鉄損を低減して効率の向上が図れる永久磁石電動機の駆動装置、密閉型圧縮機、および冷凍サイクル装置を提供する。
【解決手段】 空調負荷が所定値未満のとき、永久磁石電動機1を1シリンダ運転しながら、回転子12の磁束量を減少させ、かつ相巻線Lu,Lv,Lwをスター結線する。空調負荷が所定値以上のとき、永久磁石電動機1を2シリンダ運転しながら、回転子12の磁束量を増加させ、かつ相巻線Lu,Lv,Lwをデルタ結線する。
(もっと読む)
ブラシレスモータの電気角推定方法およびブラシレスモータ
【課題】ブラシレスモータの電気角を、高分解能エンコーダを要することなく、モータの構成に不可欠な機能を利用して低コストで精度よく推定することができる電気角の推定方法および高精度に回転制御を行うことができるブラシレスモータを提供する。
【解決手段】回転子を目標回転速度で回転させるPWM駆動電圧の演算に用いる電気角を、PWM駆動電圧における周期を利用して推定する。また、回転子と、固定子と、回転子位置検知センサと、PWM駆動信号を印加する駆動回路と、回転速度検出器と、電流検出器と、制御部とを有するブラシレスモータにおいて、制御部は、前記推定方法で電気角を推定し、少なくとも回転速度検出器および電流検出器の検出結果を受けて回転子の目標回転速度に応じてPWM駆動電圧を生成するための指令信号を電気角を用いて演算し、指令信号を駆動回路に送信する。
(もっと読む)
モータ制御装置、及びモータ制御システム、並びにこれを用いた電気洗濯機
【課題】複数の位置信号の何れかに重畳したノイズを除去する。
【解決手段】ロータ回転位置センサ108が出力する複数の位置信号Hu,Hv,Hwを用いて、モータのロータ回転位置を特定する位置情報検出手段201と、位置信号の何れかの変化を検出してから、所定の時間間隔で、位置信号の状態を複数回検出し、その複数回検出した検出結果から過半数回以上検出された位置信号の状態を新たなロータ回転位置情報とする位置情報検出手段201と、位置情報検出手段が生成したロータ回転位置情報Pからモータの回転周波数ω1を検出する回転周波数検出手段202と、ロータ回転位置情報とモータの回転周波数とを用いてモータを速度制御するモータ速度制御手段206とを備える。
(もっと読む)
回転子のロック検知方法
【課題】ロックの検知精度を向上できる回転子のロック検知方法を提供する。
【解決手段】回転子10は所定の回転軸を中心に回転する。回転軸を中心とした1周は第1及び第2の範囲で構成される。第1及び第2の範囲は周方向において交互に連続して配置される。位置検出センサ2は第1の範囲に位置するときのみ活性化する位置検出信号を出力する。制御部3は位置検出信号が活性化する活性化期間と、非活性化する非活性化期間とに基づく所定の演算値が所定の範囲外となることを以って、回転子10がロックしたことを検知する。
(もっと読む)
洗濯機用モータ駆動装置およびこれを用いた洗濯機
【課題】ステータコイルの接続形態切り替えの信頼性向上を図ったモータ駆動装置を提供することを目的とする。
【解決手段】ステータコイルの接続形態を切り替えるリレー4の接点を切り替える時、インバータ回路1の電圧印加を停止し、かつインバータ回路1のDC電源電圧よりモータの誘起電圧が低くなる回転速度で切り替えるようにしたものである。これにより、電流検出手段なしにリレー接点に電流を流さずに切り替え動作させることができるので、低コストで高信頼性を図ることが図れるものである。
(もっと読む)
1 - 20 / 43
[ Back to top ]