
Fターム[5H560DA12]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 位置検出器を用いずに位置検出するもの (1,239)
Fターム[5H560DA12]の下位に属するFターム
誘起電圧、逆起電圧 (1,079)
Fターム[5H560DA12]に分類される特許
1 - 20 / 160
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3が、低保持力の永久磁石である可変磁石を備えた可変磁束モータ3aであり、回転数に応じて可変磁石に磁化電流を供給し磁束を制御することにより、可変磁束モータ3aが所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器

【課題】安定制御可能な範囲を拡張し、多様なモータに対応したモータ駆動装置を提供すること。
【解決手段】ブラシレスDCモータ4に流れる電流を取得する電流検出部7と、電流検出部7で検出された電流値がブラシレスDCモータ4の駆動している速度とは異なる周期での変化を検出し結果によって通電角を120度以上180度未満の間で変更する通電角変更部8と、電流検出部7が取得した電流の位相と所定の関係を有する波形で、かつ、周波数設定部9で設定した周波数で通電角変更部8によって決定された通電角の波形である第2の波形信号を出力することにより、電流状態に応じて安定制御可能な通電角へと変更を行うこととなり、電流と印可電圧の位相差の補正による制御可能な範囲を拡張し、更に多様なモータやモータ出力に対応するモータ駆動装置を提供可能となる。
(もっと読む)
半導体装置及びモータ駆動装置
【課題】簡単な構成でモータの進角を適切に制御できる半導体装置を提供する。
【解決手段】一実施形態によれば、半導体装置は、制御信号生成部と、上限電圧制限部と、進角データ生成部と、を備える。前記半導体装置は、モータを駆動するモータ駆動信号の進角を制御する。前記制御信号生成部は、前記モータに流れる電流に応じた制御信号を生成する。前記上限電圧制限部は、前記制御信号の最大値を、供給された上限電圧に制限した進角制御信号を出力する。前記進角データ生成部は、前記進角を表す進角データと前記進角制御信号との関係線を生成し、前記関係線と前記進角制御信号とに基づいて前記進角データを生成する。前記関係線は、下限点から変化点を通って上限点に至る。前記変化点は、前記進角制御信号が前記上限電圧未満の変化点電圧であり、且つ、前記進角データが前記進角設定電圧に応じた進角を表す点である。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの駆動制御装置から外部の上位制御装置に送信される回転速度情報の認識精度を維持する。
【解決手段】ブラシレスモータを外部の上位制御装置からの制御指令に基づいて駆動制御するブラシレスモータの駆動制御装置において、ブラシレスモータの回転速度情報、又はブラシレスモータ及びブラシレスモータの駆動制御装置に発生した異常の内容を表す異常情報を、PWM信号により外部の上位制御装置に送信するときに(S408)、PWM信号の周波数を、回転速度情報又は異常情報に応じて設定し(S406,S407)、PWM信号のデューティ比を、異常が発生したときと発生していないときとで異なる値D1,D3に設定する(S403,S405)。また、異常が発生した場合、ブラシレスモータが回転可能であるときには、デューティ比をさらに異なる値D2に設定して(S404)、周波数を回転速度情報に応じて設定する(S406)。
(もっと読む)
モータ制御装置
【課題】 脱調を回避しつつモータを制御可能なモータ制御装置を提供すること。
【解決手段】 ブラシレスモータに所定の通電パターンにより通電することで駆動するモータ制御手段を備えたモータ制御装置において、前記モータの実トルクを検出するトルク検出手段と、前記モータの電流値に基づいて推定トルクを検出するトルク推定手段と、前記実トルクと前記推定トルクとの差分に基づいて脱調傾向か否かを判断し、脱調傾向と判断したときは、脱調防止対策制御を実行する脱調防止対策制御手段と、を備えた。
(もっと読む)
モータ制御装置
【課題】モータの磁束を検出し、エンコーダ等の位置検出器を用いずに過渡応答時でも起動時でも正弦波駆動を安価に実現することを可能にするものである。
【解決手段】モータ100にモータの磁束を検出する磁束検出器102が取り付けられている。本実施例では説明の都合上、モータ100は三相の同期モータであるとする。磁束検出器102は図2に示すように、モータの磁石が発生する磁束を検出して、それぞれの位相差が約120度の正弦波状の磁束信号CS1 ,CS2 ,CS3を出力する。3相の巻線うち2相を励磁し、励磁時の前記位置検出手段の検出位置を前記制御手段が前記ブラシレスモータを駆動する出力波形の原点とすることで、起動時から正弦波駆動を可能とし、さらに過渡時においても、常に効率の良い正弦波駆動が安価に実現可能となる。
(もっと読む)
ブラシレスDCモータ制御方法およびその装置
【課題】磁極位置角の検出を行うことなくブラシレスDCモータを駆動する。
【解決手段】インバータ部1からの出力波形をブラシレスDCモータ2に供給し、ブラシレスDCモータ2の電圧、電流、もしくは磁束を検出し、検出信号を位相基準発生部3に供給して位相基準を発生し、発生した位相基準および外部から与えられる位相指令に基づいて波形制御部4から波形制御信号を出力し、出力波形位相を所定値とすべくインバータ部1を制御する。
(もっと読む)
圧縮機モータ制御装置
【課題】トルク脈動に対する速度変動により、回転速度・位置推定演算の推定誤差が過大となる状態が発生する。
【解決手段】予め決められた一回転中の複数の各位置において回転速度が限界最低速度を下回った場合の速度補償値を記憶し、記憶された速度補償記憶値により前記複数位置における電流指令を補正する電流指令補正器を備え、回転速度が限界最低速度を下回らないように速度補償を行う。これにより、高調波の影響を抑制し安定した駆動を得られる圧縮機モータ制御装置を提供することができる。
(もっと読む)
送風装置
【課題】低振動および低騒音であり、しかも低消費電力を実現できると共に、部品点数の削減も可能な送風装置を提供する。
【解決手段】モータ3は三相の駆動コイル35,35B,35Cを鉄芯に巻装してなる三相モータであり、且つモータ3の駆動コイル35,35B,35Cに駆動電流としてのコイル電流を供給する駆動回路18を内蔵し、この駆動回路18は回転子の位置検知素子を不要にする構成を有している。モータ3として三相モータを採用することで、従来よりもトルク変動を小さくして、ファンモータの振動や騒音を低減させることができる。またファンモータとしての効率が向上するため、消費電力の低減を図ることが可能になる。さらに、位置検知素子を不要にすることで、ファンモータとして部品点数を削減できる。
(もっと読む)
モータ
【課題】不平衡なV結線の巻線構成においてセンサレスで制御するモータを提供する。
【解決手段】端子間インピーダンスが不平衡であるため各相電圧が不平衡となるV結線のモータにおいて、端子間電圧とY相の電流IyとZ相の電流Izを検出し、自己インダクタンスの電圧成分、相互インダクタンスの電圧成分、巻線抵抗による電圧降下成分を計算して巻線の誘起電圧成分を求め、この誘起電圧成分よりロータ回転位置θreを検出し、電圧、電流を制御するモータ。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ抵抗推定部27は、たとえば、加算角リミッタ24から出力される加算角αの絶対値が所定の閾値B以下であるときに、モータ抵抗Rを推定する。誘起電圧推定部28は、モータ抵抗推定部27によって推定されたモータ抵抗Rを用いて、モータ3の回転によって生じる誘起電圧を推定する。回転角推定部29は、誘起電圧推定部28によって推定された誘起電圧に基づいて、ロータ50の回転角の推定値θEを演算する。ロータ角変位演算部30は、演算周期間の推定回転角θEの変化量を求めることによって、演算周期当たりのロータ50の角変位Δθを求める。加算角ガード41は、必要時において、ロータ角変位演算部30によって求められるロータ角変位Δθに基づいて加算角αを補正する。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
同期電動機駆動システム
【課題】ダイオードを挿入した回転子コイルを備えた同期電動機の低速センサレス制御において、複雑な処理を行う必要無く、回転角度の推定と磁極判別を同時に行うことが可能、言い換えれば推定範囲が−90°≦Δθ≦+90°ではなく、−180°≦Δθ≦+180°であるようなセンサレス制御方式による同期電動機駆動システムを提供する。
【解決手段】同期電動機7と、同期電動機7を制御する制御装置1とを備え、同期電動機は、固定子コイルを有する固定子4と、ダイオードが挿入された回転子コイル5を持つ回転子3とを有し、制御装置1は、固定子4に高周波磁束を発生させるための高周波磁束指令を生成する高周波磁束発生制御部11と、高周波磁束指令に応じて固定子コイルに発生した高周波電圧と高周波電流との少なくとも一方に基づいて、ダイオードに流れる電流の有無に応じた指標を算出するとともに、算出した指標に基づいて同期電動機7の回転角度を推定する回転角度推定部14とを有する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
電力変換装置
【課題】モータが接続される電力変換装置において、モータの起動時にコンデンサ電圧の上昇を抑制する。
【解決手段】スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチングを制御する制御部(5)を設ける。また、スイッチングにより生じるリプルを平滑するコンデンサ(3a)とを設ける。そして、制御部(5)によって、モータ(7)の起動時に、起動時の最大運転周波数以上の周波数で且つ該モータ(7)が駆動しない大きさの高周波電流を該モータ(7)に流して該モータ(7)の回転子(7a)の位置検出を行い、検出した位置に応じ、モータ電流(iu,iv,iw)の大きさを制御する。
(もっと読む)
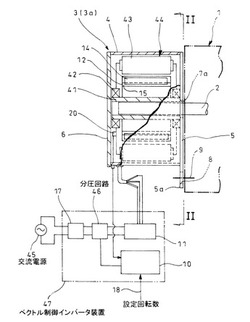
電動機制御方法およびその装置
【課題】周期的負荷に対して電動機の回転速度変動を抑制するとき、回生電力の活用により省電力化を達成する。
【解決手段】交流電源1をコンバータ2に供給して直流電源を得、平滑用コンデンサ3で平滑化し、インバータ4により交流電源化して電動機5に供給する。電動機5は周期的な負荷変動を呈する圧縮機6を駆動する。コンバータ2の出力端子間に回生抵抗7を接続している。インバータ4のパワーデバイスの電流最大値をオーバーしないように、インバータ4から電動機5へ供給する電圧または電流を制御する。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
モータ駆動装置
【課題】室外機の温度を検出すること及び搭載圧縮機のモータの温度による減磁特性をテーブルにもち、ハード過電流及びソフト過電流を同時に可変することにより適切な過電流設定値を選択し、各運転条件に応じた過電流設定を可能にする。
【解決手段】減磁電流特性テーブルを備え、且つ前記ブラシレスモータへのモータ相電流を演算する相電流演算手段により、算出されたインバータ出力電流と前記室外機圧縮機の温度を検出する温度検出手段によって閾値電圧を決定するソフト的過電流保護機能と、室外温度により選択される、3値以上の電圧比較手段とを備え、その電圧比較手段を用いたハード的過電流設定値を備え、出力に応じて前記駆動装置からのPWM信号を遮断し圧縮機を停止させるハード過電流保護手段とソフト過電流保護手段の2種類の過電流保護手段を同時に備える。
(もっと読む)
モータ駆動装置およびそれを用いた冷却装置、多相センサレスモータの状態の判定方法
【課題】センサレスモータの起動時において、その状態を正確に判定可能な検出回路を提供する。
【解決手段】複数のコンパレータCMPU〜CMPWは、それぞれが複数のコイルLU〜LWごとに設けられ、対応するコイルの一端に生ずる逆起電力VU〜VWを、中点電圧VCOMと比較し、比較結果を示す検出信号BEMFU〜BEMFWを生成する。遅延回路62U〜62Wは、複数のコンパレータCMPU〜CMPWそれぞれから出力される検出信号BEMFU〜BEMFWを所定時間τ、遅延させる。判定部70は、遅延前の検出信号BEMFU〜Wおよび遅延後の検出信号BEMFDU〜Wを、所定の期待値パターンEXP1、EXP2と比較する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。指示電流値生成部30は、指示操舵トルクT*と検出操舵トルクTに基づいてγ軸指示電流値Iγ*を設定する。指示電流値生成部30は、指示電流増減量演算部30Aと加算器30Bとを含んでいる。指示電流増減量演算部30Aは、指示操舵トルクT*の符号と、検出操舵トルクTと指示操舵トルクT*との偏差ΔT(=T−T*)とに基づいて、指示電流値Iγ*に対する電流増減量ΔIγ*を演算する。指示電流増減量演算部30Aによって演算された電流増減量ΔIγ*は、加算器30Bにおいて、指示電流値Iγ*の前回値Iγ*(n-1)に加算される。これにより、今演算周期での指示電流値Iγ*が演算される。
(もっと読む)
1 - 20 / 160
[ Back to top ]