
Fターム[5H560DA13]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 位置検出器を用いずに位置検出するもの (1,239) | 誘起電圧、逆起電圧 (1,079)
Fターム[5H560DA13]の下位に属するFターム
巻線に電流が流れているときのもの (548)
Fターム[5H560DA13]に分類される特許
1 - 20 / 531
車両用操舵装置
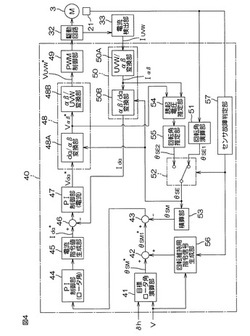
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用ブラシレスモータの駆動装置

【課題】 より簡素な構成で製造コストを削減しながら、回転子の適切な位置検出によってブラシレスモータを駆動することができる車両に搭載された車両用ブラシレスモータの駆動装置を提供する。
【解決手段】 複数の固定子巻線UI、VI、WIへの電圧の供給をオン/オフするための電流調整PWM信号を生成する駆動信号生成手段54と、生成された電流調整PWM信号に応じて、各固定子巻線に電圧を供給する電圧供給手段20と、電流調整PWM信号から所定の期間TMREF1だけ位相をずらした内部PWM信号を生成する位置検出用信号生成手段55と、生成された内部PWM信号および検出された各固定子巻線に供給される電圧に応じて、回転子と各固定子巻線との相対的な位置を検出する位置検出手段55と、を備え、駆動信号生成手段54は、検出された回転子の位置に応じて、電流調整PWM信号を生成する。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合に、ブラシレスDCモータの運転を継続することが不可能となって脱調停止するという課題を有していた。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて、所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においてもロータ位相の変化状態に応じて出力電圧を変化させ、過負荷時にオーバーラップ通電をする際、位相の変化に対して脱調しにくい低回転時よりオーバーラップさせることにより、モータの運転状態を追従させるようにした。
(もっと読む)
電動オイルポンプ装置
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
電動車両用駆動モータ
【課題】低速回転域で所定のトルクを確保し高速回転域で逆起電力の発生を低減すると共に、低速回転域および高速回転域で電流の流れるタイミングを適正に設定できるようなシンプルな構成の電動車両用駆動モータを提供する。
【解決手段】電動車両用駆動モータは、2n個の磁極を有するマグネットを備えるロータ、ロータの各磁極に対向し周面に6m個の突起部が有するステータコア24、回転検出部、電流制御部、駆動回路を含む。ステータコア24は周方向に等間隔で形成される3m個の第1突起部群と3m個の第2突起部群とを含み、第1突起部群を構成する第1突起部36と第2突起部群を構成する第2突起部38とが交互に配置される。第1突起部36には第1コイルが巻回され、第2突起部38には第2コイルが巻回される。第2突起部群と第1突起部群とは、第2突起部38が当該第2突起部38を挟む2つの第1突起部36のうち一方に偏って配置される。
(もっと読む)
モータ制御装置
【課題】3相分のモータコイルの誘起電圧の検出信号を絶縁して制御部に出力する際に、絶縁素子(フォトカプラ)の個数を3個から1個に減らす。
【解決手段】本発明のモータ制御装置10では、3相ブラシレスモータ1を惰性で回転させるフリーラン状態とし、高電圧系の回路(電圧比較回路21と波形合成回路22等)において、U、V、W相のモータコイルに発生する誘起電圧を各相ごとにそれぞれ検出(例えば、ゼロクロス点の発生タイミングを検出)し、この3相分の検出信号を低電圧系の制御回路(制御部30)に出力する際に、高電圧系の回路において、上記3相分の検出信号を基に、各相の検出信号に含まれるそれぞれの検出情報(例えば、ゼロクロス点の発生タイミングの情報)を含む1つの信号を合成し、この合成された信号を1つの絶縁素子(フォトカプラPC1)を介して、低電圧系の制御回路(制御部30)に出力する。
(もっと読む)
ブラシレスモータの駆動装置及び始動方法、並びにブラシレスファンモータの駆動装置及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置、ブラシレスモータの始動方法、ブラシレスファンモータの駆動装置、及びブラシレスファンモータの始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスファンモータの駆動装置及びブラシレスファンモータの制御方法
【課題】ブラシレスファンモータのロータ停止位置を精度良く検出できるようにする。
【解決手段】ラジエータに対して配設されたラジエータファンの回転機構に使用されるブラシレスファンモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相のコイルに流す電流の通電パターンを指令する信号を発生させる。電流比較手段が、コイルに流れる電流の電流値が予め設定された閾値以上になったら検出信号を出力する。カウンタが、通電パターンを指令する信号が出力されてから検出信号が出力されるまでの時間を通電パターンごとに計数する。位置推定手段が、通電パターンごとに計数されたカウント値の大小からロータ停止位置を決定する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
モータ駆動制御装置および空調機器
【課題】停止時を含む低速域から高速域まで回転子の位置検出ができ、電流歪みが小さく、かつ、中性点電位の検出が不要な、位置センサレス制御を行う。
【解決手段】180度通電手段(制御手段)6が、180度通電でPWM制御されたパルス信号をインバータ3へ供給すると、インバータ3の各スイッチ素子Sup〜SwnがPWM制御されてスイッチングされる。これによりインバータ3から交流モータ1へPWM制御された三相交流電流が供給される。このとき、調整手段8は、交流モータ1の運転状態(回転速度、トルク、モータ電流、モータ印加電圧等)に応じて、停止手段7から出力される180度通電のパルス信号の停止期間を変化させる。これにより、停止手段7は、180度通電手段6からインバータ3へ供給されるパルス信号のうち、調整手段8で設定された停止期間に相当する期間だけ、所定の相のパルス信号の送信を停止させる。
(もっと読む)
内接ギアポンプユニット
【課題】低回転から高回転まで、ロータの回転角度をより高精度に検出することが可能な内接ギアポンプユニットを提供する。
【解決手段】インナギア31とアウタギア32と電動モータとモータ制御手段60と磁界検出手段51Aとを備え、電動モータは周方向に複数の磁極が配置されたロータ33と複数のコイルとを有し、モータ制御手段は、コイルに通電するための通電手段と、通電していないコイルに発生する誘起電圧を検出可能な誘起電圧検出手段と、を各コイルに対応させて有しており、出力軸の回転時において、磁界検出手段からの検出信号に基づいて検出した第1検出ロータ角度と、出力軸の回転時において、通電していないコイルに対応する誘起電圧検出手段からの検出信号に基づいて検出した第2検出ロータ角度とを求め、第1検出ロータ角度と第2検出ロータ角度に基づいて補正した第1検出ロータ角度に基づいてそれぞれのコイルへの通電を制御する。
(もっと読む)
内接ギアポンプユニット
【課題】よりシンプルな構成にて、誘起電圧検出手段からの検出信号に基づいて、より低い回転数までより効率良く電動モータを回転駆動することができる内接ギアポンプユニットを提供する。
【解決手段】インナギア31とアウタギア32と電動モータとモータ制御手段60とを備え、電動モータは1組または複数組のN極とS極の磁極を有するロータ33と磁極と同数組のコイル34U、34Wとにて構成された2相モータである。モータ制御手段は、通電手段64U、64Wと誘起電圧検出手段65U、65Wとをそれぞれのコイルに対して備えており、一方の誘起電圧検出手段の検出信号を反転させる信号反転手段66Wと、信号反転手段の出力信号と他方の誘起電圧検出手段の検出信号とを重畳する信号重畳手段67とを備え、コイルへの非通電時における信号重畳手段からの出力信号に基づいて検出したコイルに対するロータの回転角度に基づいてコイルへの通電を制御する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの脱調を抑制する。
【解決手段】複数の巻線を備えたブラシレスモータの各相に対するパルス電圧の通電モードを切り替えることで、ブラシレスモータを回転駆動するブラシレスモータの駆動装置は、非通電相の電圧(誘起電圧)と電圧閾値とに基づいて通電モードを順次切り替える(S36〜S40)。また、ブラシレスモータの駆動装置は、パルス電圧の印加直後に現われる誘起電圧の振れを検出しないように、PWM制御のデューティ比の下限値を設定すると共に(S33)、誘起電圧が低下しないように、通電モードの切り替えタイミングにおける誘起電圧変化と電圧閾値に基づいてデューティ比の上限値を設定する(S34)。そして、デューティ比をその上限値及び下限値で画定される範囲内に規制することで、ブラシレスモータの脱調を抑制する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの過渡状態において脱調が起こり難くする。
【解決手段】ブラシレスモータが第1の回転速度N1未満で回転駆動する低速運転領域では、非通電相の相電圧と閾値との比較結果に応じて通電モードを切り替える。ブラシレスモータが第1の回転速度N1以上かつ第2の回転速度N2以下で回転駆動する中速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立し、かつ、その状態から所定角度回転するのに要する時間が経過したとき、又は、非通電相の相電圧が所定電圧を横切った第1の条件が成立したときに、通電モードを切り替える(S362〜S368)。また、ブラシレスモータが第2の回転速度N2より速く回転駆動する高速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立したときに、通電モードを切り替える(S362、S369)。
(もっと読む)
モータ駆動装置及び記録装置
【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
1 - 20 / 531
[ Back to top ]