
Fターム[5H560DA19]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 位置検出器の個数が3であるもの (119)
Fターム[5H560DA19]に分類される特許
1 - 20 / 119
検出装置、駆動装置
【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置

【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
電動機制御装置、及びその電動機制御装置を用いた電動過給装置
【課題】電動機の損傷が発生することなく、適切に位置センサの位相を補正でき、位置センサの取り付け誤差低減にコストをかける必要のない電動機制御装置、及びその電動機制御装置を用いた電動過給装置を得る。
【解決手段】電動機5の磁極位置を検出する位置センサ信号の位相を補正する位相補正量を生成して出力する位相補正手段83を備え、位相補正手段83は、電動機5の回転速度が所定の範囲内にある場合に、通電停止信号を生成して出力し、位置センサの信号または第1の位相と電動機5の誘起電圧との比較に基づいて位相補正量を生成して記憶し、出力する。
(もっと読む)
ブラシレスDCモータおよびそれを搭載した送風装置
【課題】ブラシレスDCモータとそれを搭載した送風装置において、回転数に対して最適な進角値を得て高効率で低振動低騒音を実現することを目的とする。
【解決手段】ブラシレスDCモータ2の通電位相を進み位相に補正する進角補正手段10と、外部回路4からの出力指示値より前記進角補正手段10の進角値を生成する進角生成手段12を有し、前記進角生成手段12は、前記外部回路4からの出力指示値に対して閾値を設け、前記閾値を境に前記進角補正手段10の進角値をゼロから線形的に変化させる構成としたことにより、回転数に対して最適な進角値を得ることができ、高効率で低振動低騒音を実現することができる。
(もっと読む)
PWMインバータ駆動永久磁石式同期モータおよび換気送風機の制御方法
【課題】モータ発生トルクを高精度に制御できる小形で安価なPWMインバータ駆動永久磁石式同期モータおよび換気送風機の制御方法を得ること。
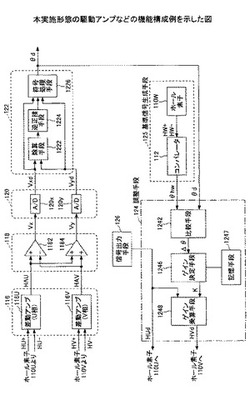
【解決手段】12,14では位置センサ信号が示す相誘起電圧の位相と該当モータ巻線に流れるモータ電流の位相との位相差を位相差目標値に近づけほぼ一定にし、モータ電流を発生トルクに比例させる。11,9ではPWMインバータ主回路の直流母線に挿入したシャント抵抗器にて直流母線電流を検出し、平均化して求めた直流母線の平均電流を、3の変調率および同期モータの力率相当で除算し、係数倍して、モータ電流フィードバック値Imfを求める。8ではモータ電流指令値Im*とモータ電流フィードバック値との比較結果に基づいて、第1の電圧調整成分(q軸電流指令)の出力を調整することによりモータ電流を目標値に近づける。
(もっと読む)
モータの制御装置
【課題】従来品よりも騒音やスイッチングロスの低減をバランスよく実現できるモータを安価に提供できるようにする。
【解決手段】コイル群の各相に駆動電流を供給するインバータ回路20、所定の入力信号に従ってインバータ回路20をPWM方式により制御し、ロータ3を所定の回転速度で駆動する制御回路30を備える。制御回路30は、予め設定された所定の基準値を出力する波形切替設定部34や前記入力信号と前記基準値とを比較する比較部35、通電信号形成部39を含む。通電信号形成部39は、比較部35から入力される比較結果信号に基づいて、印加電圧の波形が矩形状である第1通電方式と、印加電圧の波形が台形状又は正弦曲線状である第2通電方式とに切り替える。
(もっと読む)
モータ制御装置及び方法
【課題】ロータの位置を検出するホールICが故障した場合においても、ブラシレスモータに対して位相のずれが小さい、適切な正弦波状のPWM波形を印加することができるモータ制御装置を提供する。
【解決手段】ロータの位置を検出するホールICを複数有するブラシレスモータに対して正弦波状のPWM波形を印加するモータ制御装置であって、ホールICの各出力信号に基づき、1又は複数のホールICの故障を検出する手段(ステップS1)と、故障が検出された場合に、故障が検出されなかった1又は複数のホールICの出力信号が変化した時刻に応じて、PWM波形の電気角を所定の設定値に補正する手段(ステップS4、S6) を備える。
(もっと読む)
ブラシレスモータの制御装置
【課題】モータの停止中に回転子が微動した場合やノイズ等が発生した場合でも、モータ駆動信号生成が誤動作するのを防止できるブラシレスモータの制御装置を提供することにある。
【解決手段】センサ信号処理回路14は、ホールIC24U,24V,24Wにより検出されたブラシレスモータ20の3相の磁極位置検出信号HU,HV,HWの内、2つの磁極位置検出信号を入力信号とし、該2つの入力信号がそれぞれH,Lを繰り返すときには、第1の出力信号sigAは、そのH,Lの繰り返しに応じて、H,Lを繰り返す信号を出力し、第2の出力信号sigBは、H又はLの一定レベルを出力し、第1の入力信号がH,Lを繰り返すが、第2の入力信号はH又はLの一定レベルのときは、第1及び第2の出力信号は、H又はLの一定レベルを出力する。
(もっと読む)
モータ制御装置及びバルブタイミング調整装置並びにインバータ回路の通電制御方法
【課題】モータの実回転方向が回転方向指令と逆になった場合に、フリーホイールダイオードにおいて発生する損失を軽減できるモータ制御装置を提供する。
【解決手段】制御回路60は、外部より指令として与えられるモータ4の目標回転方向Dtと、回転角センサSU,SV,SWが出力するセンサ信号に基づき信号生成ブロック72により検出されるモータ4の実回転方向Drとが相違する方向不一致状態を検出すると、120度通電方式から180度通電方式に切り替えてインバータ部76を構成する上段スイッチング素子FU,FV,FWのオン期間を進み位相側に拡げるように制御し、還流電流を上段スイッチング素子FU,FV,FWを介して流す。
(もっと読む)
モータ駆動装置
【課題】磁極位置信号に関する初期設定を自動で設定できるモータ駆動装置を提供する。
【解決手段】トルク指令生成器1と、磁極位置設定器2と、検出方向設定器としてのCS信号方向設定器3と、検出方向切替器4と、電流制御器5とを備えている。本モータ駆動装置が、同期モータ30を回転駆動するように駆動制御することによりモータ30の回転子が回転する。また、モータ30には磁極センサ31が取り付けられている。磁極センサ31は、モータ30の回転動作に応じて、回転子の磁極の位置に応じた磁極位置信号を本モータ駆動装置へと出力する。
(もっと読む)
送風装置およびそれを搭載した電気機器
【課題】圧力損失など静圧が変化しても風量の変化量が極めて少ない高精度な風量−静圧特性を実現した上で、湿度の変化に応じて、湿度が高い場合は送風量を多くできる送風装置の提供を目的としている。
【解決手段】磁石回転子3の磁極部3aをポリアミド6樹脂にて形成することで、同一分子長においてアミド基が多いために、アミド基と水素結合する水分子が、さらに湿度が高い領域では周囲の水分子を引きつけ、水分子−水分子の水素結合を形成して膨潤するため、磁石回転子3の磁極部3aの外径は大きくなり、エアーギャップ18は小さくなることとなり、駆動コイル2に誘起される誘起電圧は高くなり、駆動コイル2に供給する電流が同一であれば、誘起電圧が高くなった分、軸トルクは高くなるので、常湿時に対して高湿時には換気風量が増加する風量−静圧特性が得られる。
(もっと読む)
ブラシレスモータの駆動装置
【課題】定常回転でも安定した回転が得られ、かつ処理時間を低減したブラシレスモータの駆動装置を提供する。
【解決手段】ブラシレスモータの駆動装置10は、回転速度検出部19から供給される回転速度信号に基づいて第1駆動波形PWM信号と第2駆動波形PWM信号の切替の判定をし、いずれの信号を出力するかの指令信号を駆動切替部14に供給する駆動切替判定部20と、を備え、駆動切替判定部20は、回転速度が加速または減速であるときは、第1のしきい値と第2のしきい値は、同一の値とし、回転速度が定常であるときは、第1のしきい値と第2のしきい値は、異なる値とし、回転速度が、第1のしきい値より大きいときは、第2駆動波形PWM信号を出力する判定をし、第2のしきい値より小さいときは、第1駆動波形PWM信号を出力する判定をし駆動切替部14に指令信号を供給する。
(もっと読む)
モータ制御装置、画像形成装置、半導体集積装置及びモータ制御プログラム
【課題】装置の状態に応じて進角を調整することで良質な画像を提供することが可能なモータ制御装置、画像形成装置、半導体集積装置及びモータ制御プログラムを提供することを目的としている。
【解決手段】固定子と回転子とを有するモータの駆動を制御するモータ制御装置であって、当該モータ制御装置の状態に基づき前記モータの進角調整を行うか否かを判定する調整判定手段と、前記調整判定手段による判定結果に基づき、前記モータの進角調整を指示する調整指示手段と、前記調整指示手段による指示を受けて、前記回転子の誘起電圧位相に対するモータ電流位相の進角を調整する進角調整手段と、を有する。
(もっと読む)
電動機の制御回路、及びその制御回路を用いた空気調和機
【課題】 安定した運転が可能な電動機の制御回路を得ることを目的とする。
【解決手段】 電動機に電圧を印加するインバータと、インバータに直流電圧を供給する直流電源と、直流電源とインバータとの間に接続されたシャント抵抗と、直流電源の電圧を検出する直流電圧検出手段と、シャント抵抗の両端電圧を平滑化する平滑手段と、平滑手段の出力電圧を直流電圧検出手段の検出電圧に基づいて補正演算する電圧補正演算手段と、電圧補正演算手段の出力に基づき、インバータの出力電圧を制御するインバータ制御手段と、を備えた。
(もっと読む)
ブラシレスモータの駆動装置
【課題】モータの回転速度が大きく変動するような場合、例えば加減速時でも追従性が良好なブラシレスモータの駆動装置を提供する。
【解決手段】ブラシレスモータの駆動装置10は、ブラシレスモータ21に駆動電流を供給するドライバ回路11と、外部からの速度指令信号と位置信号とに基づいてPWM回路14に変調波形の制御信号を出力して制御する制御部5と、を有するブラシレスモータの駆動装置であって、制御部5は、位置検出部16から出力される3つの位置信号の変化タイミング間の時間をパルスカウントし、2つ前のカウント値と1つ前のカウント値との差を1つ前のカウント値に加算した時間を次の変調波形の60°位相分の時間幅データとして使用して、変調波形を形成し、その変調波形をPWM回路14に出力して、ブラシレスモータ21を駆動する。
(もっと読む)
モータ駆動回路及びそれを備えたモータ
【課題】上位コントローラとのインターフェイス等の故障によって、速度指令としてのPWM信号のデューティ比が100%になった場合でも、モータが最大回転数で回転するのを防止できるような構成を得る。
【解決手段】モータ部2の速度指令として入力されるPWM信号のデューティ比を検出し、該検出されたデューティ比に対応するデューティ信号を出力するデューティ検出部22aと、該デューティ検出部22aから出力されるデューティ信号に基づいて、上記モータ部2の駆動信号を生成するPWM信号生成部22bと、を備えた構成とする。そして、上記デューティ検出部22aを、上記デューティ比が100%であると検出した場合に、上記PWM信号生成部22bに対して、上記モータ部2を最大回転数よりも低い所定回転数で回転させるようなデューティ信号を出力するように構成する。
(もっと読む)
加減速検出回路
【課題】
電源電圧の異常な上昇を防止し、トランジスタやモータの損傷や破壊を防止することができる加減速検出回路を提供する。
【解決手段】
モータの回転速度の一定状態、加速状態、または減速状態を検出する加減速検出回路(100)は、モータに取り付けられたホールセンサから出力されるホール信号(HU)の1周期に内挿される内挿パルス信号(DIVCLK)を生成するパルス生成部(110)と、内挿パルス信号(DIVCLK)の数をホール信号(HU)の1周期の期間内でカウントするカウンタ(121)と、カウンタ(121)のカウント値に応じて所定の加速判定パルス(Ja)または減速判定パルス(Jb)を出力する比較回路(122、123)を備える。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】ロータ回転角の推定で戻し処理が行われるがロータが反転しない場合や停止する場合等にもロータ回転角を正確に推定できるモータ制御装置を提供する。
【解決手段】ロータ回転角の離散的な検出結果とそれから得られる角速度推定値ωeとトルク情報とに基づき次のように回転角推定値θreを求める。電動パワーステアリング装置にてモータのロータ回転角の次の検出前に回転角推定値θreが検出予定回転角θnxに達すると、直前検出時点tn-1及び検出予定回転角到達時点tnの操舵トルクτ(n-1),τ(n)と角速度推定値ωeとに基づき回転方向の反転/非反転を推定する。その後、回転角推定値θreが検出済回転角θrに向かうものとし、上記推定結果が非反転の場合にはΔτ(n)=|τ(n)−τ(n-1)|に比例した角度量Δθだけ変化した時点tn+1以降で、反転の場合には30度(検出間隔の1/2)だけ変化した時点tn+1以降で、回転角推定値θreを一定に維持する。
(もっと読む)
モータ制御装置
【課題】低コストで実現可能であって、停止時にはロータを所定の停止位置で速やかに停止させることができ、しかも起動時にはロータの速やかな起動を可能にする。
【解決手段】モータ制御装置1は、用紙を搬送するための駆動源として設けられ、ロータ24とステータ23とを有するブラシレスモータ22と、ロータ24の回転位置を検出するエンコーダ31と、ブラシレスモータ22の起動区間、定常区間および停止区間のそれぞれにおいてエンコーダ31で検出されるロータ24の回転位置に基づきブラシレスモータ22を制御する制御部10とを備える。制御部10は、ブラシレスモータ22の停止区間において回転数が停止可能な回転数となった後、エンコーダ31で検出されるロータ24の回転位置に基づいてロータ24がステータ23に対して所定の停止位置となるときにサーボロックを実行してブラシレスモータ22を停止させる構成である。
(もっと読む)
モータ制御部、用紙搬送制御部および用紙搬送部
【課題】モータ電流値が最適となるように進角量を調整する際、オーバーシュートを招くことなくモータの効率を向上させる。
【解決手段】モータの回転速度を設定・制御する機能を有するモータ制御部において、設定回転速度およびモータ電流量に応じた進角量データを示す進角量データテーブルを格納した記憶部を備え、モータ回転速度、モータ電流量およびモータ回転子位置をもとに、前記進角量データテーブルを参照し、前記モータ回転子位置に基づいてモータの進角量を制御するので、速度のオーバーシュートを極力回避して、モータを効率よく運転することを可能にする。進角量の増加または減少を段階的に行い、最終的に最適な進角量となるように進角制御する。
(もっと読む)
1 - 20 / 119
[ Back to top ]