
Fターム[5H560DB07]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604) | エンコーダ、パルスジェネレータ (78)
Fターム[5H560DB07]に分類される特許
1 - 20 / 78
像担持体駆動装置、その制御方法、および制御プログラム、並びに画像形成装置
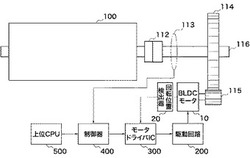
【課題】コストが増加することなく、しかもエネルギー損失を低減して、ランダムな外乱に像担持体を良好に追従させる。
【解決手段】ブラシレスDCモータ10によって感光体ドラム100などの像担持体が駆動される。エンコーダ113によって像担持体の駆動速度が検出され、制御器400、モータドライバIC300、および駆動回路200は駆動速度と予め設定された目標速度とに応じてブラシレスDCモータに流す駆動電流を制御する。また、制御器、モータドライバIC、および駆動回路は、ブラシレスDCモータを制動するためのショートブレーキ信号がオンであると、ブラシレスDCモータに流す駆動電流と逆向きの電流を生じさせてブラシレスDCモータ駆動モータの制動を行う。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置

【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
モータ制御装置および画像形成装置
【課題】モータの回転数が低下した場合に、モータの状態の切り分けを行うことが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置4cは、モータ11の回転数を判断する回転数判断部29bと、モータ11の動作状態を判断するための複数の閾値を記憶する記憶部27と、回転数判断部29bにより判断されたモータ11の回転数と複数の閾値とに基づいて、モータ11の動作状態を判断する状態判断部29cとを備える。状態判断部29cは、回転数判断部29bにより判断されたモータ11の回転数が第1閾値を下回る場合に、モータ11が故障状態であると判断し、回転数判断部29bにより判断されたモータ11の回転数が第1閾値を上回る状態で第2閾値を下回る場合に、モータ11の負荷が増大した状態であると判断する構成とされている。
(もっと読む)
モータ制御装置
【課題】 DCモータにおける過剰トルクの付加をすみやかに検知してDCモータの回転駆動を停止させることができるモータ制御装置を提供する。
【解決手段】 DCモータ及び駆動回路からなるモータユニットに対し、DCモータの回転駆動を許可する回転イネーブル信号を供給するモータ制御装置であって、モータユニットへの供給電流を検出し、過電流を検知する過電流検知部と、過電流の検知結果に基づいて、回転イネーブル信号を生成する回転イネーブル信号生成部により構成される。回転イネーブル信号生成部は、DCモータの起動後の一定期間内において、過電流の検知結果にかかわらず回転イネーブル信号を出力し、一定期間の経過後において、過電流が検知された場合に回転イネーブル信号の出力を停止する。
(もっと読む)
モータ駆動装置
【課題】ロータマグネットの磁極数に制限無く、広範囲のブラシレスモータの駆動に使用可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、コイルユニットと回転軸に固定された磁極数nのマグネットを有するロータマグネットとを有するモータ本体10と、磁極検出素子11,12,13とを備えた3相n極構造のDCブラシレスモータ1を駆動する。DCブラシレスモータ1を駆動では、例えば、1つの磁極検出素子11からの出力信号の磁極数nの半分のホール信号周期からロータマグネットの1回転周期Tを演算し、正弦波駆動信号の1周期SをS=T/(n/2)により求め、正弦波駆動信号の1周期Sを1つの磁極検出素子11の出力信号の1周期毎に更新する。
(もっと読む)
位置検出装置およびモータ駆動装置
【課題】主に、変位検出部の検出分解能を変更することなく、検出する位置情報の分解能を設定、変更することができるようにする。
【解決手段】位置検出部(エンコーダ1、ホールIC6)と、変位検出部(エンコーダ1)と、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)とを備える。そして、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)を、変位パルス(エンコーダパルスenca)のエッジが所定の区間エッジ数(分周比分母DEN)だけ到来する間に、区間エッジ数(分周比分母DEN)よりも小さい所定の非カウント数(分周比分母DENと分周比分子NUMとの差)だけ変位パルス(エンコーダパルスenca)のエッジをマスクしてカウントし得るように構成する。
(もっと読む)
インバータ制御装置
【課題】電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供する。
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な進角値を自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、基準進角値と補正量に比例係数を乗じて得られる進角補正値を加算して、進角設定信号を出力する進角設定手段と、外部から入力される基準信号EXCの周期に対する補正基準周期Ref_countの比を補正量とし、その補正量を進角値設定手段が備える所定の比例係数Ksに乗算して得られる進角補正値により、基準進角値を補正する進角設定補正手段とを備えている。
(もっと読む)
モータ制御装置
【課題】1シャント電流検出方式の電圧補正による騒音を低減する。
【解決手段】モータ制御装置(3a)は、三相式モータ1を駆動するインバータ2と直流電源4との間に流れる電流の検出結果(idc)からモータ1の相電流を検出する電流検出部(21)と、モータ駆動用の駆動電圧の指令値(vγ*、vδ*)に高周波重畳電圧の指令値(vhγ*、vhδ*)を重畳する電圧重畳部(26、27、28)と、2相分の相電流を検出可能とするために重畳電圧及び駆動電圧の合成電圧を補正する電圧補正部(29)と、電流検出部(21)の検出結果に基づく原電流信号に含まれる、重畳電圧による重畳電流の信号成分を低減することにより、フィルタ電流信号(iγ、iδ)を生成するフィルタ部(23)を備え、フィルタ電流信号を用いてモータ1を制御する。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】高回転・高電流時に誘起電圧の歪みによる誘起電圧補償誤差が著しく大きくなる場合に、誘起電圧補償誤差を低減させるようにしたモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】3以上の相数nの電動モータ12を駆動するモータ駆動制御装置であって、前記電動モータを駆動する電流指令値を演算する電流指令値演算部82と、前記電動モータのモータ角度を検出するモータ角度検出部13と、前記電動モータのモータ角速度を検出するモータ角速度検出部80と、前記モータ角速度で回転するd−q座標に沿って演算されたd軸電流及びq軸電流値の少なくとも一方と、前記モータ角速度及び前記モータ角度とに基づいて補償用誘起電圧を演算する補償誘起電圧演算部84とを備え、前記電動モータの誘起電圧を前記補償誘起電圧演算部で演算した補償用誘起電圧でフィードフォワード補償する。
(もっと読む)
駆動装置
【課題】簡単な構造で、モーターの起動時もモーターを適切に回転させることができる駆動装置を提供する。
【解決手段】ローターとステーターとの一方に永久磁石を用いるモーターと、モーターに三相の電流を供給するインバータと、モーターの回転角を検出するアブソリュートエンコーダと、モーターの回転角を推定する回転角度推定回路と、アブソリュートエンコーダで検出した回転角及び前記回転角度推定回路で推定した回転角の少なくとも一方に基づいてインバータからモーターに供給する電流を制御する制御器と、を有し、制御器は、モーターの回転速度が閾値以下の場合は、アブソリュートエンコーダで検出した回転角に基づいてインバータから前記モーターに供給する電流を制御すること。
(もっと読む)
回転電気機械のトルクリプル抑制制御装置および制御方法
【課題】トルク脈動抽出フィルタのフィルタ次数を高くした場合にも、学習制御パラメータを自動調整して所望の抑制効果を得ることができる。
【解決手段】実システム33のトルク検出値Tdetに含まれるトルク脈動成分をトルクリプル抽出部34を通してn次複素フーリエ係数TAn、TBnの形で検出し、I−P制御部31により複素フーリエ係数TAn、TBnを0に抑制するように制御パラメータKp,kiを自動調整し、非干渉化部32で求めるn次補償電流IAn*,IBn*を使って回転電気機械のトルクリプルを抑制する手法において、トルク脈動抽出フィルタGFは高次ローパスフィルタとし、学習制御は、学習制御で求めるn次補償電流IAn*,IBn*のうち回転電気機械の応答を支配する低次の極のみをマッチングさせる部分的モデルマッチング手法で制御パラメータを自動調整する。
(もっと読む)
モータ制御装置、それを用いた画像形成装置、モータ制御装置の制御方法、及びモータ制御装置の制御プログラム
【課題】位置偏差を早く解消して必要な精度を維持することができ、かつ、より簡単な制御で位置制御を行えるモータ制御装置を提供する。
【解決手段】画像形成装置の制御回路は、ブラシレスモータを制御し駆動させる。制御回路は、モータの起動時からモータが所定の速度ポイントに到達するまでの間の区間Aに、略一定の加速指令に基づいてモータを加速させ、その後、モータが目標回転速度をオーバーシュートし加速度が略ゼロになるまでの区間Bに、モータを速度制御する。制御回路は、モータが加速度ゼロポイントに達してから位置偏差が解消される地点に到達するまでの区間Cに、モータの位置制御を開始する。制御回路は、モータが目標速度に到達するまでに発生した負の位置偏差量に応じて、その後、モータの回転速度を積極的にオーバーシュートさせることで、その位置偏差量を解消する。したがって、モータの起動時に発生する位置偏差がより早く解消される。
(もっと読む)
ブラシレスDCモータの駆動制御装置
【課題】ブラシレスDCモータを、非相補的なPWMスイッチング出力を用いて高効率に駆動し、アナログ電流検出回路を用いず、高精度に電流制御する駆動制御装置を実現する。
【解決手段】PWM比決定器5で、駆動中のモータから検出される軸角度及び回転角速度と、モータの駆動に必要な目標電流のみを入力して、各相に流す電流に係る最も効率の良い駆動制御モード及びPWMデューティー比を求め、この駆動制御モード及びPWMデューティー比に基づいてPWM信号発生器4で各相のPWM信号を発生し、このPWM信号に基づき、駆動回路3を構成するハーフブリッジ回路7においてオープン状態を含む状態でモータの各相に駆動電流を与える。
(もっと読む)
モータ制御装置、モータ駆動システム及びインバータ制御装置
【課題】1シャント電流検出方式にて検出困難な相電流を推定によって導出する。
【解決手段】電流検出ブロック42は、モータに電流を供給するインバータと直流電源との間に流れる母線電流をサンプリングして最大電圧相及び最小電圧相の電流値idcA及びidcBを検出する。中間相電流推定ブロック43は、dq軸上の電流指令値id*及びiq*と回転子位置θから中間電圧相の電流値imidを推定する。相電流算出ブロック44は、検出ブロック42にて最大電圧相及び最小電圧相の電流値を正確に検出できている期間には検出ブロック42の出力値(idcA及びidcB)から三相電流値(iu、iv及びiw)を算出する。一方、検出ブロック42にて最大電圧相又は最小電圧相の電流値を正確に検出できていない期間には、検出ブロック42の検出値(idcA又はidcB)と推定ブロック43の推定値imidから三相電流値を算出する。
(もっと読む)
駆動制御装置、画像形成装置、用紙搬送装置及び画像読取装置
【課題】移動体を目標停止位置に保持するホールド処理によるハンチングの発生を従来よりも抑える。
【解決手段】信号出力手段として、モータ9の回転角度に応じた値となる3相の正弦波状のアナログ信号を、互いに120°ずつ位相ずれさせて出力するホールセンサ9cを用いるとともに、ホールド処理にて、ホールセンサ9cから出力される3相のアナログ信号の出力値の変化に基づいて、移動体の動きを検出する処理を実施するように、目標速度発生器1、速度制御部2、位置信号抽出部100、ホールド制御部5、セレクター3、シーケンス制御部6、カウンター7、ドライバ回路8などからなる制御部を構成した。
(もっと読む)
モータの磁極位置補正方法
【課題】ダイレクトドライブモータを採用した傾斜軸において、ダイレクトドライブモータとエンコーダの取付け誤差を制御装置内で補正する方法を提供する。
【解決手段】トラニオン14に取付けられたダイレクトドライブモータ11を駆動し、トラニオン14を位置制御により所定の角度に位置決めさせる(S10)。トラニオン14が位置決めされている状態で発生しているトルク指令値を検出し(S12)、トルク指令値と予め設定した閾値を比較する(S14)。トルク指令値が、閾値以上であれば磁極位置補正値を変化させ(S16)、再度、トルク指令値を検出し閾値との比較を行う。この動作をトルク指令値が閾値未満になるまで繰り返す(S12〜S16)。トルク指令値が閾値未満となる磁極位置補正値が見つかれば、その値をメモリに記憶する(S18)。この補正値により補正した電気角オフセット値を用いてモータ制御する。
(もっと読む)
モータ制御装置、モータ制御システム、画像形成装置
【課題】制御用ICには変更を加えないか変更を最小限にして、ステッピングモータの制御信号をDCモータの制御信号に変換できるモータ制御装置等を提供すること。
【解決手段】STMの励磁方式、回転位置検出手段の分解能を励磁方式に応じて補正する分解能情報、及び、DCモータ89と被回転体のギヤ比情報、に応じて生成された前記前記回転速度指示情報に基づき、前記コントローラが生成したSTMの補正後制御信号を取得し、DCモータ89の目標位置を決定する目標値決定手段81と、回転位置検出手段の分解能に応じた単位回転量を前記被回転体の回転に応じてカウントして、DCモータの回転位置を決定する状態決定手段82と、目標位置と回転位置、又は、目標速度と回転速度、の少なくとも一方に基づき決定したDCモータの制御量に応じて、DCモータの回転速度を制御するPWM信号を生成するPWM信号制御手段83〜87とを有することを特徴とする。
(もっと読む)
同期電動機の磁極位置推定装置
【課題】回転子の初期磁極位置を精度良く推定することができる同期電動機の磁極位置推定装置を提供する。
【解決手段】推定手段による磁極位置の推定後に回転子が回転したときに、同期電動機に設けられたエンコーダのパルスカウントから得られた回転子の回転量を磁極位置の推定値に加算して制御位相を演算する位相演算手段と、エンコーダの基準信号の入力直前及び直後に位相演算手段に演算された制御位相の差分が予め設定された許容誤差内になるように、パルス電圧のオン時間を変更するパルス電圧印加条件変更手段と、を備えた。
(もっと読む)
モータ駆動制御装置
【課題】 相電流検出のためのDCリンク電流検出タイミングを電圧指令信号の値に応じて変化させずに所定タイミングに固定して相電流検出を可能とし、電流検出タイミングを制御する回路や処理を低減する。
【解決手段】 所定のタイミングで値が更新される複数相の電圧指令信号をキャリア信号によりパルス幅変調して生成される少なくとも1相のPWM信号のパルス幅が、電圧指令信号の値の増加に応じて、電圧指令信号の値更新周期の前端を基準として後端方向へ増加し、この後端方向にパルス幅の増加したPWM信号とは別の少なくとも1相のPWM信号のバルス幅が、電圧指令信号の値の増加に応じて、電圧指令信号の値更新周期の後端を基準として前端方向へ増加するよう、PWM手段が複数相のPWM信号を生成する。
(もっと読む)
1 - 20 / 78
[ Back to top ]