
Fターム[5H560DC12]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636) | 電流 (1,752)
Fターム[5H560DC12]に分類される特許
161 - 180 / 1,752
回転機の制御装置
【課題】d軸方向に高周波電圧信号を重畳し、これに伴ってモータジェネレータ10を流れる高周波電流に基づき回転角度θを推定する方式の場合、回転角度θの推定に際してノイズが生じること。
【解決手段】角度推定部40では、拡張誘起電圧に基づき回転角度を推定する。ここで、モータジェネレータ10に印加される電圧の高周波成分は、インバータIVの現在の操作状態を表現する電圧ベクトルViから指令電圧vdr,vqrを減算したものとなる。これに伴ってモータジェネレータ10を流れる電流に生じるリプルに基づき、拡張誘起電圧におけるq軸電流の微分値に比例する量を算出することで、回転角度θを推定する。
(もっと読む)
回転機の制御装置

【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部32では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、実際に重畳される高周波電圧指令信号と高周波電流信号との外積値を算出する。外積値とその目標値との差がゼロとなるように回転角度θが操作される。相電流がゼロクロスする期間を短縮すべく、指令電流変更部21では、指令電流idr,iqrの位相を操作する。
(もっと読む)
インバータ制御装置
【課題】電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供する。
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルクτとの間のトルク偏差Δτに基づいてγ軸電流増減値を演算し、当該γ軸電流増減値を積算することによりγ軸電流指令値Iγ*を演算する。また、加算角演算部41は、上記トルク偏差Δτに基づいて、演算周期毎のモータ回転角変化量に相当する加算角θaを演算し、当該加算角θaを積算することにより、制御上の仮想的な制御角θcを演算する。そして、加算角演算部41は、そのトルク偏差Δτに基づいて、上記加算角θaを低減する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ抵抗推定部27は、たとえば、加算角リミッタ24から出力される加算角αの絶対値が所定の閾値B以下であるときに、モータ抵抗Rを推定する。誘起電圧推定部28は、モータ抵抗推定部27によって推定されたモータ抵抗Rを用いて、モータ3の回転によって生じる誘起電圧を推定する。回転角推定部29は、誘起電圧推定部28によって推定された誘起電圧に基づいて、ロータ50の回転角の推定値θEを演算する。ロータ角変位演算部30は、演算周期間の推定回転角θEの変化量を求めることによって、演算周期当たりのロータ50の角変位Δθを求める。加算角ガード41は、必要時において、ロータ角変位演算部30によって求められるロータ角変位Δθに基づいて加算角αを補正する。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】共振型フィルタを用いてモータの振動と騒音を抑制する場合に、脱調や起動不良の発生を解消し、モータの制御も支障無く行うことができるモータ制御装置する。
【解決手段】負荷トルクの変動に対応して変動する制御値を受け、制御値の周期的な変動成分を強調することにより電流補正値を生成する共振型フィルタ30と、共振型フィルタによる変動成分の強調度合いであるゲインを制御するゲイン制御部32を備える。電流補正値を電流指令値に重畳することにより、重畳電流指令値を生成し、重畳電流指令値に従ってモータの制御を行う振動抑制制御を実行する。ゲイン制御部は、振動抑制制御の開始時、所定の目標値に対して徐々にゲインを増加させる。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合の電気角の推定精度を向上させる。
【解決手段】電気角推定部110は、操舵トルクTrによりモータの第1推定回転方向d1を推定する第1回転方向推定部111と、誘起電圧ベクトルの移動方向からモータの第2推定回転方向d2を推定する第2回転方向推定部114と、第1推定回転方向d1と第2推定回転方向d2とを選択的に切り替える回転方向修正部115とを備える。回転方向修正部115は、第1推定回転方向d1と第2推定回転方向d2とが相違する場合、誘起電圧ベクトルの向く方向から決まる第2推定電気角と、モータ制御で使用している推定電気角θebとが一致したタイミングで、最終推定回転方向dxを第2推定回転方向d2に切り替える。
(もっと読む)
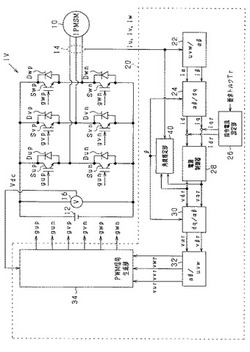
PWMインバータ駆動永久磁石式同期モータおよび換気送風機の制御方法
【課題】モータ発生トルクを高精度に制御できる小形で安価なPWMインバータ駆動永久磁石式同期モータおよび換気送風機の制御方法を得ること。
【解決手段】12,14では位置センサ信号が示す相誘起電圧の位相と該当モータ巻線に流れるモータ電流の位相との位相差を位相差目標値に近づけほぼ一定にし、モータ電流を発生トルクに比例させる。11,9ではPWMインバータ主回路の直流母線に挿入したシャント抵抗器にて直流母線電流を検出し、平均化して求めた直流母線の平均電流を、3の変調率および同期モータの力率相当で除算し、係数倍して、モータ電流フィードバック値Imfを求める。8ではモータ電流指令値Im*とモータ電流フィードバック値との比較結果に基づいて、第1の電圧調整成分(q軸電流指令)の出力を調整することによりモータ電流を目標値に近づける。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部22では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。高周波電圧指令信号と指令電流とが直交する設定を採用する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】レゾルバの検出角度に関わらず検出精度が向上することが可能なモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】微分係数が不連続な点を有する角度検出信号を検出して出力する角度検出部12と、検出された角度検出信号の不連続点を検出する不連続点検出部131と、検出された不連続点近傍の角度検出信号を、不連続点以前のランプ波形の角度検出信号に置換して出力する置換部133と、角度検出部の出力信号または置換された出力信号を、基準値と比較し直線近似により制御信号を算出する制御信号算出部134と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電力変換装置
【課題】トルク制御動作において、モータ電流の上昇を確実に検出できる電力変換装置を提案する。
【解決手段】交流電源(6)側からの電力を複数のスイッチング素子(Sr,Ss,St,Su,Sv,Sw,Sx,Sy,Sz)のスイッチング動作によって所定の周波数の交流電力に変換し、該交流電力をモータ(5)に出力する変換部(20)を設ける。モータ(5)の出力トルクが、交流電源(6)の出力電圧の周波数の整数倍の脈動成分である電源脈動成分を含み、且つモータ(5)の負荷トルク変動に応じて変動するようにトルク制御動作を行うとともに、電源脈動成分のピークと負荷トルク変動成分のピークとのタイミングが一致もしくは略一致したときのピーク電流値を求め、該ピーク電流値が所定の上限値を超えないように、出力トルクの変動幅を低減させる制御部(40)を設ける。
(もっと読む)
電動機駆動装置
【課題】動作環境に依らず簡単かつ低コストに電動機の回転出力を正確に算出し、電動機の回転出力を制御することで、電動機での過度な負荷運転を抑制する。
【解決手段】電動機駆動装置は、電動機に流れる電流を検出する電流検出部7と、電動機3の周囲温度、巻線温度、界磁磁石温度の少なくともいずれか1つの温度を検出する温度検出部17と、基準温度に対する前記電動機の諸元値を温度検出部17で検出された温度値で補正する電動機諸元補正部16と、電流検出部7によって検出された電流値と電動機諸元補正部16によって補正された諸元値を用いて電動機3の回転出力を算出する電動機回転出力算出部15とを備え、電動機回転出力算出部15によって算出された回転出力算出値が予め設定された所定値未満となるように電動機3の回転出力を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧へのPWMの指令Duty値を制限するDuty指令制限値を算出するモータ電圧指令制限値算出手段13と、Duty指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
モータ駆動装置
【課題】簡単な手法により、起動前のモータの回転数を把握する。
【解決手段】モータ駆動装置20は、インバータ25と、電圧検出部23と、回転数推定回路28とを備える。インバータ25は、平滑コンデンサ22によって平滑された電圧である平滑後電圧Vflを用いて、ファンモータ51を駆動するための駆動電圧SU,SV,SWを生成し、ファンモータ51に出力する。電圧検出部23は、ファンモータ51の起動前に、平滑後電圧Vflの値を検出する。回転数推定回路28は、電圧検出部23による検出結果に基づいて、起動前のファンモータ51の回転数を推定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
161 - 180 / 1,752
[ Back to top ]