
Fターム[5H560DC12]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636) | 電流 (1,752)
Fターム[5H560DC12]に分類される特許
101 - 120 / 1,752
駆動装置および車両
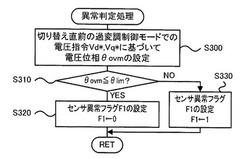
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
モータ起動制御装置およびモータ起動制御方法

【課題】 センサレス駆動方式による同期モータの駆動制御において、異常音の発生を抑制しつつ、駆動素子の破壊の危険性を低減してモータを起動することができるモータ起動制御装置およびモータ起動制御方法を提供する。
【解決手段】 起動制御部11は、強制起動期間で、ピーク値ホールド回路部17で検出されたモータ電流のピーク値のばらつきを算出し、算出したピーク値のばらつきが所定範囲よりも大きいか否か、小さいか否、および所定範囲内であるか否かを判定する。起動制御部11は、算出したピーク値のばらつきが所定範囲よりも大きいとき、駆動電圧の変調率を小さくし、算出したピーク値のばらつきが所定範囲よりも小さいとき、駆動電圧の変調率を大きくする。算出したピーク値のばらつきが所定範囲内であるとき、起動を完了して、強制起動期間を終了し、通常運転期間に移行し、制御部18による位相差制御を開始する。
(もっと読む)
駆動装置、及び駆動方法
【課題】モータの負荷が大きい場合において誘起電圧に基づいてモータを駆動させる。
【解決手段】駆動装置は、モータのコイルに通電するインバータ回路と、各コイルに生じる誘起電圧と等価中性点電位との比較結果を示すパルス信号を生成する誘起電圧インターフェース回路と、コイルに流す電流の向きを示す複数の通電パターンを用いて通電を行い、所定の電流値に達するまでの通電時間に基づいてロータが停止している位置を検出する停止磁極位置検出部と、停止磁極位置検出が検出したロータの位置に基づいて選択した通電パターンで通電を行いロータにトルクを加えた後に、誘起電圧インターフェース回路が出力するパルス信号のレベルに基づいてロータにトルクを加える通電パターンを選択し、選択した通電パターンで通電をインバータ回路に行わせる起動通電を行った後に誘起電圧に基づいた制御を行う通電制御部とを備える。
(もっと読む)
ブラシレスDCモータのセンサレス制御装置
【課題】 強制転流モードからセンサレス制御モードへの移行がスムーズに行われるブラシレスDCモータのセンサレス制御装置を提供する。
【解決手段】 指令回転数=初期回転数として(S2)、強制転流モード(S3)を開始する。強制転流モード(S3)は、所定上昇幅で回転数を増加して(S5)、設定回転数に達するまで(S4)行う。そして、回転数が設定回転数に到達し(S4)かつロータ位置が検出可能となったとき(S6)に、センサレス制御モード(S7)に移行する。
(もっと読む)
ブラシレスDCモータおよび換気送風機
【課題】発生トルクを高精度に制御可能なブラシレスDCモータおよび換気送風機を得ること。
【解決手段】モータ部3の回転速度を求め回転速度フィードバック値ωrfを出力する速度検出部5と、直流電圧を検出し直流母線電圧フィードバック値Vdcfを出力する直流母線電圧検出部6と、直流母線の平均電流を求め直流母線平均電流フィードバック値Idcfを出力する直流母線平均電流検出部7と、電機子電流指令値Ia*と各フィードバック値を入力し駆動回路2に電圧指示値Vsを出力する電機子電流制御部8と、を備え、電機子電流制御部8は、電機子電流フィードバック値Iafを推定する電機子電流推定部8fと、電機子電流指令値Ia*と電機子電流フィードバック値Iafとの偏差ΔIaを算出する偏差算出部8dと、偏差ΔIaをなくす電圧指示値Vsを出力する制御アンプ8aと、を備える。
(もっと読む)
モータ制御装置
【課題】電源電流指令値に基づいてブラシレスモータを電流制御で駆動する場合に、外乱に対するロバスト性を向上させることができるモータ制御装置を提供する。
【解決手段】q軸電流指令値演算手段21,22は、ロータが電気角で360°回転する毎に、電源電流検出値IPと電源電流指令値IP*との偏差に基づいてq軸電流指令値Iq*を演算する。そして、電圧指令値演算手段23,24,26,27は、所定の演算周期Ts毎に、q軸電流指令値演算手段21,22によって決定されたq軸電流指令値Iq*とq軸電流検出値Iqとの偏差および所定のd軸電流指令値Id*とq軸電流検出値Idとの偏差に基づいて、q軸電圧指令値Vq*およびd軸電圧指令値Vd*とを演算する。この電圧指令値Vq*,Vd*に基づいてモータ1が駆動される。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)で、かつ電流Ibの2乗値が許容値以上である場合(S12にてYES)、インバータの矩形制御の実行を禁止する(S13)。一方、上アームオン制御中でない場合(S10にてNO)、モータ回転速度Nが共振回転速度領域に含まれない場合(S11にてNO)、電流Ibの2乗値が許容値未満である場合(S12にてNO)の少なくともいずれかの場合、制御装置は、矩形制御の実行を許容する(S14)。
(もっと読む)
モータの磁極位置推定方法
【課題】磁極位置推定結果が真値に対して電気角90度以上ずれていた場合においても、不安全動作を引き起こすことのない磁極位置推定方法を提供する。
【解決手段】仮の磁極位置を基準に電気角半周期をN分割した位相に電流を印加し、そのときの移動方向D(+,0,−)を判定するステップ1と、移動方向の符号が反転する電気角領域を2分割した位相に電流を印加し、そのときの移動方向D1を判定するステップ2と、移動方向が+から0および0から−に変化する電気角領域をそれぞれ2分割した位相に電流を印加し、そのときの移動方向D2を判定するステップ3と、移動方向が0となる電気角領域の中間点を発生電磁力が零となる位相と決定するステップ4と、発生電磁力が零となる位相から90°ずらした位相を発生電磁力が最大となる位相と決定するとともに電流を印加し、その時の移動方向D3を判定するステップ5とを備える。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
駆動装置、及び停止位置検出方法
【課題】モータの駆動を開始する際におけるロータの位置の検出において、モータに電力を供給する電源装置にかかる負荷を抑える。
【解決手段】駆動装置は、コイルごとに設けられたスイッチング素子を有し、スイッチング素子のオンとオフとを切り替えてコイルに通電するインバータ部と、コイルに流す電流の向きを示す複数の通電パターンから順に1つずつ選択し、選択した通電パターンに基づいてスイッチング素子のオンとオフとを、電源装置が供給できる最大電流値に応じたデューティ比で切り替えてコイルに通電させる通電パターン決定部と、通電パターンごとに、コイルに流れる電流の電流値が目標電流値に達するまでの時間である通電時間を計測する電流印加時間計測部と、電流印加時間計測部が計測した通電パターンごとの通電時間に基づいて、ロータが停止している位置を推定するロータ停止位置推定部とを備える。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置およびこれを備えた空気調和機
【課題】インバータ駆動回路のドライブ信号が停止した際の、圧縮機モータ等の惰性運転時の回生により、商用電源を整流し、それを平滑する平滑キャパシタの両端の、直流電圧が過昇圧され、コンデンサ等の素子のサージ耐圧を超える問題があった。
【解決手段】制御器回路やインバータ駆動回路の電源をつくる電圧変換器を平滑キャパシタに接続し、インバータ駆動回路からドライブ信号の出力が停止し、三相同期モータが惰性運転の時、回生により平滑キャパシタに発生する直流電圧を直流電圧検出器で検出し、ある設定値を超えたらインバータ回路の下アームを全相オンさせ、誘起電圧をショートし、平滑キャパシタに発生した直流電圧は電圧変換器を介して制御器回路やインバータ駆動回路、モータ内部のインピーダンスにて消費させることで直流電圧が素子のサージ耐圧を超えることを抑制する。
(もっと読む)
回転機の制御装置
【課題】ブートストラップ回路を用いたシステムにおいて、モデル予測制御を適用する場合、高電位側のドライブユニットの電源となるコンデンサの電圧が低下することで、高電位側のスイッチング素子を適切に駆動することができなくなることを防止する。
【解決手段】制御装置20は、モデル予測制御によって、インバータINVの8通りの操作状態のうち、制御量とその指令値との差を最小とする操作状態を選択し、これに基づき、インバータINVを操作する。ただし、コンデンサCu,Cv,Cwの中に電圧が過度に低下するものがある場合、強制的にスイッチング素子Sun、Svn,Swnをオン状態とする。
(もっと読む)
圧縮機駆動装置
【課題】
三相センサレスDCブラシレスモータによって圧縮機の圧縮機構部を駆動するインバータを備えた圧縮機駆動装置には、低コストで高効率な省エネルギー性が求められている。
【解決手段】
インバータの三相スイッチング回路は、電圧の印加方向に沿って上流側となるIGBTおよび下流側となるスーパージャンクションMOSFETまたはSiC−MOSFET素子を備え、DCブラシレスモータの起動時に、1つのIGBTをオンするとともに別の直列回路の2つのスーパージャンクションMOSFETまたはSiC−MOSFET素子をオンしてDCブラシレスモータのロータの位置決めを行う位置決め通電手段を備えた。
(もっと読む)
モータの駆動制御装置
【課題】簡素な回路構成と処理プロセスとで高効率にモータを駆動させることができるモータの駆動制御装置を提供する。
【解決手段】モータの駆動制御装置1は、モータ駆動制御部3の出力部6からモータ2の巻線に電力を供給し、モータ2を駆動する。モータ駆動制御部3は、指令情報生成部4と、駆動信号生成部5とを有している。指令情報生成部4には、モータ2の巻線電流情報と回転速度情報との組合せ対応する進角値群が予め記憶されている。指令情報生成部4は、モータ2の巻線電流情報と回転速度情報との組合せに応じて、進角値群から最適進角値を選択し、駆動信号生成部5に、最適進角値情報と速度指令情報とを出力する。駆動信号生成部5は、最適進角値情報と速度指令情報とに応じて、モータ2の駆動信号を出力部6に出力する。最適進角値は、モータ2の回転速度と巻線電流とに応じて、複雑な演算を必要とせずに求められる。
(もっと読む)
101 - 120 / 1,752
[ Back to top ]