
Fターム[5H560DC12]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636) | 電流 (1,752)
Fターム[5H560DC12]に分類される特許
61 - 80 / 1,752
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ制御装置

【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
インバータ制御装置、インバータ装置、及び空気調和機
【課題】スイッチング損失を低減するとともに、制御方式の切り替えを円滑に行うことを目的とする。
【解決手段】2アーム変調方式を採用し、正弦波状の基準電圧指令信号を補正して第1電圧指令信号を生成する第1信号生成部21と、正弦波状の基準電圧指令信号にその第3次高調波成分を重畳させた波形の振幅の最大値が搬送波の振幅以上になるような過変調方式による第2電圧指令信号を生成する第2信号生成部22と、第1信号生成部21の基準電圧指令信号の振幅が、該基準電圧指令信号の最大振幅値に設定された第1閾値未満の場合に第1電圧指令信号を選択し、該基準電圧指令信号の振幅が該第1閾値と等しい場合に第2電圧指令信号を選択する選択部23と、選択部23によって選択された電圧指令信号と搬送波とを比較することによりパルス幅変調信号を生成するPWM信号生成部とを備えるインバータ制御装置を提供する。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
同期電動機の駆動システム及び同期電動機
【課題】
位置センサを用いない同期電動機においては、同期電動機の発生する誘起電圧(速度起電圧)に基づいて位置を求めているため、誘起電圧の小さい零速度近傍(停止状態)や低速度域では誘起電圧の検出感度が低下してしまい位置情報がノイズに埋もれるという課題があった。
【解決手段】
同期電動機の三相固定子巻線の2相を順次選択して駆動する際に、非通電相への誘起電圧を検出し、この非通電相の誘起電圧と回転子位置情報を予め関係付けしておき、検出した誘起電圧から回転子位置情報を逆算することで回転子の位置推定を行い、更にその回転子位置情報の変化率から回転速度の検出を行って位置制御や速度制御を高精度に実現する。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
モータ駆動装置
【課題】負の界磁成分電流を最適な量だけ注入することができ、これによりモータをより高い速度で駆動できるモータ駆動装置を提供する。
【解決手段】モータ制御部は、推定ロータ速度ωmが設定値以上の場合に、その推定ロータ速度ωmの上昇に伴い増加し下降に伴い減少する負の界磁成分電流Idを加えて界磁成分電流の目標値Idrefを算出するとともに、その負の界磁成分電流Idの増減率を推定ロータ速度ωmの高さに応じて可変設定する。
(もっと読む)
電気洗濯機
【課題】脱水性能確保と、過大パワーの防止による保護を実現すること。
【解決手段】衣類を収納するドラム21を回転駆動する電動機26、電動機26に交流電力を供給するインバータ回路35を有し、電動機入力電圧可変手段42、電動機入力電流検知手段43、位置検知手段34を有し、脱水時に電動機26の出力トルクを所定値に制限する第1の速度範囲よりも高速側に、電動機入力パワーを略一定に制限する第2の速度範囲を有することにより、第1の速度範囲での過大トルクの防止と、第2の速度範囲での電動機の入力パワーの制限が可能となり、良好な脱水性能が確保と共に、信頼性の高い装置の実現、また電源系統に対する負担低減を行うことができる。
(もっと読む)
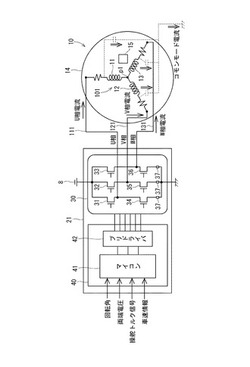
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
永久磁石同期モータの制御装置
【課題】モータを駆動しつつモータ定数を迅速に同定し、電流検出手段のオフセット値を同定して除去可能とする。
【解決手段】モータの速度及びd,q軸電圧を入力としてd,q軸推定電流を演算する電流シミュレータ9と、d軸検出電流が零となるようにモータを定速制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の自己インダクタンスノミナル値を調整して自己インダクタンスを同定し、d軸検出電流が所定値となるようにモータを制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の電機子抵抗ノミナル値を調整して電機子抵抗を同定し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数を同定し、d軸推定電流と検出電流との偏差、及び、q軸推定電流と検出電流との偏差から、電流検出手段のオフセット値を同定する同定手段10と、を備える。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
モータ制御装置
【課題】電流検出回路に故障が発生した場合でも、モータ制御の正常な動作を維持することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、インバータ回路1と、シャント抵抗Rsに流れるモータ電流を検出する第1電流検出回路10および第2電流検出回路20と、電流検出回路10、20の出力に基づいてモータ電流の検出値を算出するとともに、目標値のモータ電流を流すための指令値をPWM回路2へ出力する制御部3とを備える。第1電流検出回路10は正の第1ゲインを有し、第2電流検出回路20は第1ゲインを反転した負の第2ゲインを有する。制御部3は、第1電流検出回路10の出力に基づき算出した第1検出値と、第2電流検出回路20の出力に基づき算出した第2検出値とを用いて、電流検出回路の異常有無と、いずれの電流検出回路が異常であるかの判定を行い、正常な電流検出回路の検出値に基づいてモータ制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
永久磁石回転電機及びその運転方法
【課題】高速時の誘導起電力の低減と低速時の高トルク特性が可能な永久磁石回転電機。
【解決手段】本発明は、電機子巻線23を8極にして所定の短時間だけ大電流の磁化電流を流すことによって発生する磁界により可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の8極PMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作する4極IPMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を消磁してリラクタンストルクのみで動作する4極RMモードとし、起動時及び速度領域の移行時にこれら8極PMモード、4極IPMモード及び4極RMモードの間で相互にモードを切り替えて可変速運転する永久磁石回転電機。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
61 - 80 / 1,752
[ Back to top ]