
Fターム[5H560DC12]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636) | 電流 (1,752)
Fターム[5H560DC12]に分類される特許
41 - 60 / 1,752
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
同期電動機の制御装置及び制御方法

【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
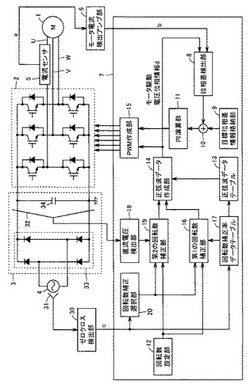
モータ制御装置
【課題】大きなリプルを有する直流電源でモータをインバータ制御した場合、モータの回転が不安定となり、振動や騒音の増大や、最悪の場合、脱調や過電流停止を引き起こす。
【解決手段】モータ制御装置は、交流電源を直流出力電圧(Vdc)に変換して出力するコンバータ(3)と、直流出力電圧を交流電流に変換してモータ(1)を駆動するインバータ(2)と、モータの回転数指令を設定する回転数設定部(12)と、回転数指令に基づきインバータ(2)を制御するPWM信号生成部(15)と、加速禁止直流電圧(d)を設定する加速禁止直流電圧設定部(16)と、加速禁止直流電圧(d)および直流出力電圧(Vdc)に基づき、モータの加速制御信号(e)を生成する加速判定部(17)とを有し、加速制御信号(e)に基づき、回転数指令の変更を禁止する。
(もっと読む)
モータ制御装置
【課題】 脱調を回避しつつモータを制御可能なモータ制御装置を提供すること。
【解決手段】 ブラシレスモータに所定の通電パターンにより通電することで駆動するモータ制御手段を備えたモータ制御装置において、前記モータの実トルクを検出するトルク検出手段と、前記モータの電流値に基づいて推定トルクを検出するトルク推定手段と、前記実トルクと前記推定トルクとの差分に基づいて脱調傾向か否かを判断し、脱調傾向と判断したときは、脱調防止対策制御を実行する脱調防止対策制御手段と、を備えた。
(もっと読む)
半導体装置及びモータ駆動装置
【課題】簡単な構成でモータの進角を適切に制御できる半導体装置を提供する。
【解決手段】一実施形態によれば、半導体装置は、制御信号生成部と、上限電圧制限部と、進角データ生成部と、を備える。前記半導体装置は、モータを駆動するモータ駆動信号の進角を制御する。前記制御信号生成部は、前記モータに流れる電流に応じた制御信号を生成する。前記上限電圧制限部は、前記制御信号の最大値を、供給された上限電圧に制限した進角制御信号を出力する。前記進角データ生成部は、前記進角を表す進角データと前記進角制御信号との関係線を生成し、前記関係線と前記進角制御信号とに基づいて前記進角データを生成する。前記関係線は、下限点から変化点を通って上限点に至る。前記変化点は、前記進角制御信号が前記上限電圧未満の変化点電圧であり、且つ、前記進角データが前記進角設定電圧に応じた進角を表す点である。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの過渡状態において脱調が起こり難くする。
【解決手段】ブラシレスモータが第1の回転速度N1未満で回転駆動する低速運転領域では、非通電相の相電圧と閾値との比較結果に応じて通電モードを切り替える。ブラシレスモータが第1の回転速度N1以上かつ第2の回転速度N2以下で回転駆動する中速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立し、かつ、その状態から所定角度回転するのに要する時間が経過したとき、又は、非通電相の相電圧が所定電圧を横切った第1の条件が成立したときに、通電モードを切り替える(S362〜S368)。また、ブラシレスモータが第2の回転速度N2より速く回転駆動する高速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立したときに、通電モードを切り替える(S362、S369)。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、発熱を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出する場合、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるよう3相のPWM信号パターンを生成する。電流判定手段は、検出された3相電流の大小関係を判定し、PWM信号生成手段は、3相間のPWMデューティ比を維持した状態で、検出された3相電流のうち最大相の通電期間をゼロ又は最小とするようPWM信号パターンを補正する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子により、モータに供給される各相の電流をより高い精度で検出できるモータ制御装置を提供する。
【解決手段】実施形態によれば、モータ制御装置は、直流を多相交流に変換する電力変換器を介してモータを駆動し、モータのロータ位置に追従するように通電パターンを生成する。通電信号生成手段は、通電制御周期内で電力変換器の直流側に接続され電流検出素子に発生する信号が少なくとも2相の電流に対応するよう通電パターンを生成し、電流検出手段は、電流検出素子に発生した信号と通電パターンとに基づき相電流を検出する。電流補正手段は検出された電流に含まれる誤差を補正し、電流制御手段は入力される電流指令値と補正された電流とに応じて通電信号生成手段が通電パターンを生成するための電流制御を行い、制御切り替え手段は、補正値演算指令を出力すると共に、前記指令の出力状態に連動して電流制御手段が電流制御を行う周期を切り替える。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、リップルの発生に基づく騒音を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段はモータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいて、モータの相電流を検出する場合に、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるように、3相のPWM信号パターンを生成し、電流判定手段が検出された3相電流の大小関係を判定し、電流値が最小を示す相の通電期間を最小通電期間とすると、PWM信号生成手段は各相のPWM信号パルスより最小通電期間を減じ、最小電流検出間隔の2倍を加えて補正する。
(もっと読む)
モータ制御装置
【課題】PWM制御における搬送波周期内で、2相の電流の高周波成分を確実に検出できるように3相のPWM信号パターンを生成可能なモータ制御装置を提供する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータ磁極位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出すると、PWM信号生成手段は、電流検出手段が、PWM信号の搬送波周期内における4点のタイミングで2相の電流をそれぞれ2回検出できるように3相のPWM信号パターンを生成する。更に電流微分手段が、前記2相のそれぞれについて2回検出した電流値の差を電流微分値として出力すると、磁極位置推定手段は、その電流微分値に基づいてモータの磁極位置を推定する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分から前記高周波電圧と同じ周波数の余弦波成分のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
電動機の制御装置
【課題】電動機の状態に係るパラメータの補正、又は、電動機若しくは電動機に係るパラメータを検出する手段の状態の判定を高精度に行うことができる電動機の制御装置を提供すること。
【解決手段】制御装置は、互いの回転子が動力伝達可能に接続される2つの電動機と、回転子の回転状態に伴い変化する、電動機の状態又は電動機に付属する補機の状態を検出する状態検出部と、2つの電動機の各動作を制御する制御部とを備える。制御部は、2つの電動機の一方の電動機である第1の電動機を駆動制御し、第1の電動機が駆動することで2つの電動機の他方の電動機である第2の電動機が回転動作しているときに状態検出部が検出した、第2の電動機の状態又は第2の電動機に付属する補機の状態に基づいて、第2の電動機の状態に係るパラメータの補正、又は、第2の電動機の状態若しくは第2の電動機に付属する補機の状態を検出する状態検出部の状態の判定を行う。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ制御装置
【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
41 - 60 / 1,752
[ Back to top ]