
Fターム[5H560HA08]の内容
無整流子電動機の制御 (40,007) | 起動 (564) | 再起動 (51)
Fターム[5H560HA08]に分類される特許
1 - 20 / 51
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
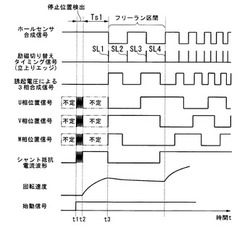
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置

【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
モータ駆動制御装置
【課題】ロータの停止位置によらず、ロック状態の解除後に確実にロータを再起動できるようにする。
【解決手段】モータ駆動制御装置1は、インバータ回路2と、制御回路部3と、PWM生成回路4と、回転位置検出回路5と、フィルタ回路6と、ロック保護部7とを備える。ホール信号Hpがゼロクロスしていないときにロータがロック状態になる第1のロック状態と、ホール信号Hpがゼロクロスするときにロータがロック状態になる第2のロック状態とを判別し、各ロック状態に適したロック保護動作とロータの再起動動作を行うため、ロータを安全かつ確実に再起動させることができ、モータ8の安定動作が可能となる。
(もっと読む)
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
(もっと読む)
画像形成装置及びブラシレスモータ制御プログラム
【課題】ロータの回転位置の検出精度低下を抑えつつ、無駄な電力消費を抑制することが可能な画像形成装置及びブラシレスモータ制御プログラムを提供する。
【解決手段】レーザプリンタ1は、受光センサ32,電圧検出回路39により検出されたFG信号、BD信号に基づきインバータ37Aによる通電をオンオフさせ、且つ、その通電オン期間にインバータ37Aをチョッピング制御し、当該チョッピング制御におけるデューティ比を変えることで目標値に近づくようブラシレスモータ33の回転速度を制御する制御回路38を備え、制御回路38は、当該チョッピング制御におけるオフ期間にFG信号、BD信号を取得し、設定されている目標値が小さいほど、チョッピング制御の周波数を低くする構成である。
(もっと読む)
回転センサレス制御装置
【課題】同期電動機の回転センサレス制御であって、インバータの直流側の電圧よりも無負荷誘起電圧が大きい領域を含めた全領域で、フリーランからの再起動を実現する。
【解決手段】一実施例に係る回転センサレス制御装置は、同期機を駆動するインバータを制御する回転センサレス制御装置において、前記同期機のインダクタンス及び誘起電圧の両方を使用して回転子の位相角及び角速度を推定する位相角・角速度推定手段と、前記インバータ及び電動機のフリーランからの起動時に、非零電圧ベクトルのみを選択するPWMを用いて、電圧指令値を生成すると共に前記インバータの出力電流を制御する制御手段とを具備し、前記位相角・角速度推定手段は、前記電圧指令値及びインバータ出力電流を用いて、前記回転位相角・角速度を推定する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】 位置推定演算を磁極判別と同時に実行可能とし、更に磁極判別時にも基本波電流の制御を行えるようにして過電流の発生を防止する。
【解決手段】 基本波電圧指令に高周波電圧を重畳して直軸電圧指令を生成する加算器9と、電機子電流を直軸電流及び横軸電流に分解し、前記高周波電圧と同じ周波数の高周波電流を抽出する座標変換器2及びフィルタ4と、前記高周波電流から回転子の速度推定値及び第1の位置推定値を演算する速度推定器7及び積分器8と、速度推定値及び第1の位置推定値の演算を行いながら、正極性及び負極性を有するパルス電圧を前記高周波電圧に重畳し、かつ、正極性のパルス電圧を重畳したときと負極性のパルス電圧を重畳したときの直軸電流の変化率により、第1の位置推定値を補正して第2の位置推定値を演算するスイッチB、メモリ5、磁極判別器6と、を備える。
(もっと読む)
ブラシレスモータの駆動装置および駆動方法
【課題】運転開始前のフリーラン状態での正確なロータの速度および位置を得て、確実且つ安定してモータの起動を行い得るブラシレスモータの駆動装置および駆動方法を提供する。
【解決手段】起動前速度・位置推定部31により、ブラシレスモータ1の起動前に、誘起電圧検出回路23の検出結果に基づき、フリーラン時(無給電時)におけるロータの速度および位置を推定し、速度・位置推定部16では、フリーラン時のロータの速度および位置を初期値とし、q軸電圧Vqおよびq軸電圧Vd、並びに、電流検出回路22で検出し2相/3相変換部15で変換されたq軸電流iqおよびd軸電流idに基づき、ロータの速度および位置を推定する。
(もっと読む)
モータ制御装置
【課題】 センサレスベクトル制御において、インバータの停止中にモータが高速に回転している場合にも、インバータをより円滑に再起動する。
【解決手段】 インバータ2の起動前に、制御器の応答が追従しないような高い速度ωで永久磁石モータ1が回転し、インバータ2の直流電圧Vdcよりも誘起電圧Edが高い状態であっても、永久磁石モータ1の電流Iu,Iw、インバータ2の直流入力電流Idc、又はインバータ2の直流入力電圧Vdcに基づいて、回転子が高速回転中か又は低速回転中かを判定し、高速回転中の場合には、インバータ2の起動タイミングを制御又は電流制御器8のゲインを増加することにより、インバータ2を再起動する。
(もっと読む)
ブラシレスモータの駆動装置、及びブラシレスモータの始動方法
【課題】負荷の大きいモータの始動を適切に行うことができるとともに、モータの始動時間を早くすることができる、ブラシレスモータの駆動装置を提供する。
【解決手段】ブラシレスモータ装置は、ブラシレスモータの始動時に前記ロータ停止位置に応じた励磁パターンにより各相巻線に初期通電する始動時励磁部と、前記始動時励磁部による初期通電を停止した後の各相巻線の誘起電圧の信号レベルを記憶する記憶部と、前記記憶部に記憶された各相巻線の誘起電圧の信号レベルと、前記始動時励磁部によるブラシレスモータの駆動により生じた各相巻線の誘起電圧の信号レベルの変化とに基づいて、ロータの位置を推定する磁極切り替えタイミング演算部と、前記磁極切り替えタイミング演算部により推定されたロータ位置に応じてブラシレスモータの駆動を行う定常時励磁部とを備える。
(もっと読む)
モータ制御装置
【課題】モータ起動時、応答良くモータ回転駆動制御を開始すると共に、非同期制御が継続することによる異音,回転脱調,停止,過電流等を回避あるいは低減すること。
【解決手段】センサレスブラシレスモータ5と、制御回路2と、駆動TR回路3と、BEMF検知回路4と、を備え、各相コイル5u,5v,5wにて発生する逆起電力の電圧ゼロクロス検出に基づいて取得したモータ回転位置情報により回転駆動制御を行う。このモータ制御装置A1において、比較基準電位回路7とモータ相コイルバイアス回路6を設け、制御回路2は、モータ起動時、全相オープンと設定デューティ駆動とを繰り返すクローズドループ制御を行い、全相オープン中における電圧ゼロクロス検出に基づき、センサレスブラシレスモータ5の回転状態検知(正回転・停止・逆回転)を実行し、回転状態検知による判定結果に応じ、センサレスブラシレスモータ5が正回転となる位相による転流制御へ移行するモータ起動制御手段(図2)を有する。
(もっと読む)
ドラム式洗濯乾燥機
【課題】脱水工程でモータを確実に起動し、モータ効率を向上して消費電力の低減を図ったドラム式洗濯乾燥機を提供することを目的とする。
【解決手段】インバータ装置でモータが電圧制御で駆動される洗濯工程と弱め界磁制御で駆動される脱水工程とを有する洗濯乾燥機において、前記モータは、ステータコアのスロット中に施された三相巻線の各相に第一の巻線と第二の巻線をそれぞれ分割して有し、洗濯工程では、各相の第一の巻線と第二の巻線を直列接続したY結線で構成してインバータ装置でモータを駆動し、脱水工程では、各相の第一の巻線と第二の巻線を並列接続したY結線で構成すると共に弱め界磁制御によってインバータ装置でモータを駆動した構成において、前記モータのステータコアを構成する電磁鋼板の板厚を0.3mm以下にして脱水工程でのモータの消費電力低減を図る。
(もっと読む)
アイドリングストップ再始動制御システム
【課題】センサレス同期発電電動機の電機子巻線に出力される誘起信号の検出範囲を拡大できるアイドリングストップ再始動制御システムを得る。
【解決手段】エンジンの始動後は発電機として動作し、アイドリングストップ後のエンジンの再始動時には始動用電動機として動作するセンサレス同期発電電動機100と、電機子巻線1から出力される誘起信号を検出する誘起信号検出回路6と、界磁巻線への通電を制御する界磁駆動回路3と、エンジンストップ指令を入力した場合で、検出された誘起信号のレベルが所定値以下のときには、前記誘起信号を増幅するために前記界磁巻線を通電制御する駆動信号を界磁駆動回路3に出力し、検出された誘起信号に基づき回転子2の回転数及び角度位置を計算し、再始動指令を入力した場合は、計算した回転子2の回転数及び角度位置に基づき、エンジンを再始動するために電機子巻線1を通電制御する再始動制御回路7とを設けた。
(もっと読む)
ブラシレスモータの駆動装置及びブラシレスモータを適用した電動車両
【課題】ブラシレスモータのセンサレス駆動方式において、始動前における回転状態を検知して適切な始動方式を決定し、逆回転状態を検知した場合の的確な逆転制動制御を実現し、逆回転状態から制動停止状態を検出してスムーズな正回転加速に引き継ぐ手段を提供する。
【解決手段】直接転流タイミングを与える位置における逆起電圧を検出して転流制御する手法をもとに、始動前のロータの回転状態を検出してそれぞれ最適の始動方式を決定すると共に、逆回転の低速時の逆起電圧を有意に増幅してロータの逆転制動から停止に至るロータ位置の測定感度を上げる手段によって、逆回転から制動、停止、さらに正回転にいたる連続した転流制御を実現する。
(もっと読む)
永久磁石同期モータの制御装置および制御方法
【課題】低コストでシンプルな装置を用いて、空転している永久磁石同期モータの位相および回転速度を推定し、空転している永久磁石同期モータを再起動運転させる。
【解決手段】永久磁石同期モータ1が空転するとき、インバータIC2の出力端子電圧は、永久磁石同期モータの位相に応じて変化する。そこで、インバータの直流負極を基準とした出力端子電圧と、一定値である閾値電圧との大小関係を比較すると、所定の位相でその極性が変化する。この大小関係は、例えば、レベルシフト回路とNOT回路のような、低コストでシンプルな装置により検出できる。この大小関係の変化に基づいて、永久磁石同期モータの位相を推定し、また、それを微分することにより回転速度を推定する。位相及び回転速度の推定値を同期運転またはベクトル制御にフィードバックさせれば、空転している永久磁石同期モータを再起動できる。
(もっと読む)
電動工具
【課題】
回転子の位置信号の異常によるブラシレス直流モータを使った電動工具の動作の不安定や故障から適切にモータを保護する。
【解決手段】
永久磁石を備えた回転子及び電機子巻線を備えた固定子を有するブラシレス直流方式のモータと、回転子の回転位置を検出する回転子位置検出手段(10〜12)と、回転子位置検出手段で検出された位置信号をもとに所定の電機子巻線へ駆動電流を供給するように制御する制御部を有する電動工具であって、制御部は、位置信号が変化したことを検出したら、所定の確定時間104内に位置信号が再び変化するかを検出し、確定時間内に位置信号が再び変化した場合(105)は最初の変化時の位置信号を無視し、確定時間内に位置信号が変化することなく最初の変化の状態を維持している場合には、最初の位置情報を用いて電機子巻線への駆動電流の切り替えを行う。
(もっと読む)
洗濯機
【課題】運転の中断や停止が発生した場合でも、次回の運転開始時に、モータの出力トルクが不足することを回避できる洗濯機を提供する。
【解決手段】ドラムモータを構成するロータマグネットに着磁量を容易に変更可能なレベルの保磁力を有するアルニコ磁石を備え、制御回路が、インバータ回路を介して、アルニコ磁石の着磁量を変化させるように励磁電流を発生させ、洗濯機の運転を停止させる場合に(ステップS11)アルニコ磁石を増磁状態にする(ステップS12)。
(もっと読む)
車両の制御装置
【課題】電動モータの脱調を防止し、バッテリ容量の復帰とともに電動モータの駆動を再開することができる車両の制御装置を提供する。
【解決手段】バッテリの残容量がバッテリ残容量判定値Qbd以下であり(ステップS13でYESと判定)、キャパシタの残容量がキャパシタ容量判定値Qcd以下である場合には(ステップS15でYESと判定)、電動モータに対する電圧の印加を停止し(ステップS16)、バッテリの容量がバッテリ復帰判定値Qbu以上に復帰した場合には(ステップS17でYESと判定)、電動モータに対する電圧の印加を再開することにより、電動モータの脱調を防止し、バッテリの容量の復帰とともに電動モータの駆動を再開することができる。
(もっと読む)
モーター装置、およびモーター装置を動作させる方法
【課題】PWM信号のソフトスタートを有するブラシなしDCモーターを提供すること。
【解決手段】DCモーターが提供される。このDCモーターは、DCモーターに提供される電力入力が不規則的である間及び/または後にDCモーターにおける電流のラッシュまたはオーバーロードを防止する。DCモーターの制御回路はDCモーターに提供される電流を制御するように構成される。DCモーターに提供される電力入力の電力不規則性が制御回路により検出されると、制御回路はPWM(パルス幅変調された)信号の生成を中止し、且つ、DCモーターに提供される電流を中止する。PWM信号を中止した後に、制御回路は電力不規則性がそれ以上検出できないときにPWM信号のソフトスタートを行うことができる。PWM信号のソフトスタートはDCモーターに提供される電流の漸進的な増加を生成してDCモーターの誤作動を引き起こす電流の急激なラッシュを防止する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】記憶されたパラメータ値を装置起動時に使用する場合であっても、温度変化や製造ばらつきによるパラメータ値のずれを補償する。
【解決手段】本モータ制御装置において、Φ算出部26は、オープンループ制御部22に使用されるモータの回路方程式に含まれるパラメータであるΦ値を、電流センサ14の検出電流に基づき算出する。Φ値記憶部28は、装置動作終了時点におけるΦ値および温度センサ6の検出温度を記憶する。初期Φ算出部27は、装置起動時点において、記憶された温度から装置起動時における温度センサ6の検出温度への変化に応じて、記憶されたΦ値を補正し、初期値としてオープンループ制御部22に与える。このことにより製造ばらつきだけでなく温度変化を補償したパラメータでオープンループ制御が行われるので、装置起動時点から直ちに高い精度でモータを制御することができる。
(もっと読む)
1 - 20 / 51
[ Back to top ]