
Fターム[5H560JJ13]の内容
無整流子電動機の制御 (40,007) | 保護、補償、監視、表示 (1,472) | 保護 (1,068) | 電気的ノイズ防止 (73)
Fターム[5H560JJ13]に分類される特許
1 - 20 / 73
モータ駆動装置およびにこれを用いた電気機器
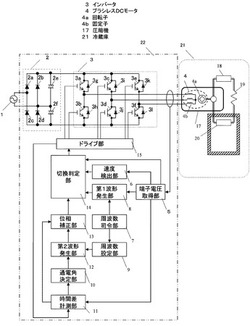
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
モータ駆動装置

【課題】モータ性能を向上するモータ駆動装置を提供することにある。
【解決手段】モータ駆動装置100は、モータを駆動するモータ駆動信号を生成する駆動信号生成部120と、この駆動信号生成部120の前段に設けられ、プルアップ動作時、駆動信号生成部120のスイッチがオン/オフする時発生される電磁波妨害によって引き起こされるモータの振動またはノイズを防止するように、駆動信号生成部120の電流を調節する電流制御部110と、駆動信号生成部120から出力されるモータ駆動信号に基づいてモータを駆動する駆動部130とを含む。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
DCモータ及びこれを備えたポンプ
【課題】低損失・低ノイズとする。
【解決手段】磁界発生用のコイル27と、コイルへの通電をPWM制御する制御部2を有するとともに、前記コイルへの通電によって回転駆動されるロータと、前記ロータの回転角を検知する回転角検知手段3と、前記ロータの回転速度を検出する回転速度検出手段4とを備えており、前記制御部2は前記回転角検知手段と前記回転速度検出手段からの出力信号を受けて、PWMキャリア周波数を決定するとともに外部からの能力可変信号に合わせてPWM制御のデューティを決定し、決定したPWMキャリア周波数とデューティで前記コイルへの電力供給を行う。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの誘起電圧にノイズが重畳していても、そのノイズの影響を排除することができ、ブラシレスモータの回転変動を抑制することができるブラシレスモータの駆動制御装置を提供する。
【解決手段】通電相切り替えタイマ1aは、ブラシレスモータ100の通電相の各相の誘起電圧が基準電圧未満となる度に、第1カウント値でセットされる。通電相歯止めタイマ1bは、ブラシレスモータ100の下流側の通電相が切り替えられたことに応じて、第2カウント値でセットされる。制御装置1は、通電相切り替えタイマ1a及び通電相歯止めタイマ1bのうちのいずれか一方のタイマがカウントダウンを終了したことに応じて、ブラシレスモータ100の通電相を切り替える。
(もっと読む)
回転機の制御装置
【課題】d軸方向に高周波電圧信号を重畳し、これに伴ってモータジェネレータ10を流れる高周波電流に基づき回転角度θを推定する方式の場合、回転角度θの推定に際してノイズが生じること。
【解決手段】角度推定部40では、拡張誘起電圧に基づき回転角度を推定する。ここで、モータジェネレータ10に印加される電圧の高周波成分は、インバータIVの現在の操作状態を表現する電圧ベクトルViから指令電圧vdr,vqrを減算したものとなる。これに伴ってモータジェネレータ10を流れる電流に生じるリプルに基づき、拡張誘起電圧におけるq軸電流の微分値に比例する量を算出することで、回転角度θを推定する。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部32では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、実際に重畳される高周波電圧指令信号と高周波電流信号との外積値を算出する。外積値とその目標値との差がゼロとなるように回転角度θが操作される。相電流がゼロクロスする期間を短縮すべく、指令電流変更部21では、指令電流idr,iqrの位相を操作する。
(もっと読む)
DCブラシレスモータの駆動装置
【課題】正弦波制御と矩形波制御を選択しながらも、駆動電圧が例えば安全規格で定められる上限値を超えないように制御することのできるDCブラシレスモータ駆動装置を提供する。
【解決手段】DCブラシレスモータ10に駆動電圧Voを供給するインバータ8と、インバータ8を介してモータ10に供給される駆動電圧Voの増減を制御するとともに、正弦波及び矩形波の一方を選択して駆動電圧Voの波形を制御する制御部11と、を備える。制御部11は、駆動電圧Voとノイズ電圧Vnの重畳電圧Vo+Vnが、規定の電圧Vlim未満となるように駆動電圧Voを制御する。
(もっと読む)
電動機駆動装置
【課題】インバータをスイッチング制御する際のノイズの発生の低減と素子の温度上昇の抑制とを両立させる。
【解決手段】インバータのPWM制御に用いるキャリアの周波数(キャリア周波数F)を、モータの電気角θeが電気角周期Tの1/4周期進む度に(ステップS120)、高周波数範囲内からランダムに抽出した高周波数の設定と低周波数範囲内からランダムに抽出した低周波数の設定とに交互に切り替える(ステップS150〜S170)。これにより、モータMGの電気信号(変調波)の山や谷(T/2周期)に対して高周波数の設定期間と低周波数の設定期間とを同期間割り当てることができ、特定のトランジスタに対して熱集中が生じるのを抑制することができる。また、キャリア周波数Fを拡散させるから、ノイズの発生を低減することができる。
(もっと読む)
ブラシレスDCモータとそれを搭載した送風装置
【課題】送風装置に搭載されるブラシレスDCモータにおいて、新たなインターフェースを追加することなく、待機時の耐ノイズ性を確保し、小型化を実現することを目的とする。
【解決手段】シーケンス制御手段13は、ゲート信号生成部11の出力前後で位置検出手段7の信号を安定電位から磁石回転子6の相対位置信号に切り換えるという構成にしたことにより、待機時は、シーケンス制御手段13が速度指示信号に基づいて位置検出手段7の出力を安定電位にしてゲート信号生成部11の入力部を安定電位とし、待機から起動時は、位置検出手段 の出力を磁石回転子の相対位置信号にしてゲート信号生成部の入力部を安定電位から切り換えることとなるので、新たなインターフェースを追加することなく、待機時の耐ノイズ性を確保し、小型化を実現することができる。
(もっと読む)
モータの回転制御装置及び方法、並びにそれを用いた画像形成装置
【課題】 瞬間的にクロックが入力されなかった場合でも回転を維持できるPLL制御を用いたモータの回転制御装置及び方法、並びにそれを用いた画像形成装置を提供する。
【解決手段】 PLL制御部12がクロックCKと位置検出信号Stとの差を偏差信号Seとして出力し、コントロール部202が偏差信号と位相検出信号Sfとから駆動信号Smを出力する、モータの回転制御装置において、コントロール部は、偏差信号が入力された場合、駆動信号を遅延させた遅延駆動信号Smdを出力し、遅延駆動信号の出力を開始してから所定時間が経過した後、駆動信号を遅延させずに出力し、モータの使用回転速度は最低回転速度の2倍以上であり、遅延時間は使用回転速度に対応するクロック周期の2倍以上の整数倍であり、所定時間は遅延時間以下である。これにより、瞬間的にクロックが入力されなかった場合でもモータの回転を維持することできる。
(もっと読む)
ブラシレスモータ
【課題】ロータの回転速度のムラが低減可能なブラシレスモータを提供する。
【解決手段】ブラシレスモータ1は、基板40と、ロータ10とを備える。ロータ10は、基板40に対して相対的に回転可能に配置され、複数極に着磁された環状の第1着磁部、および第1着磁部の基板40側端面に複数極に着磁された環状の第2着磁部とを備える。基板40には、第1着磁部の磁極の影響を受けてロータ10の回転位置を検出するホール素子41と、第2着磁部の磁極の影響を受けてロータ40の回転速度を検出するFGパターン42とが設けられる。ロータ10の回転速度のムラが低減される程度に、ホール素子41が第2着磁部より受ける磁束量は、ホール素子41が第1着磁部から受ける磁束量と比べて低減されている。
(もっと読む)
モータ駆動装置
【課題】電流量と検出角度誤差の相関データを予め取得したり、検出角度を補正したりすることなく、精度良く電気角を算出すること。
【解決手段】モータ駆動装置は、3相ブラシレスモータ4と、VR型レゾルバ5と、電気角算出器6と、を備える。3相ブラシレスモータ4は、回転駆動により漏れ磁束を発生する。VR型レゾルバ5は、3相ブラシレスモータ4の漏れ磁束によるノイズが、2つの検出信号V1,V2に対して同一に混入するような設定とされ、3相ブラシレスモータ4の回転軸位置である電気角θを検出する。電気角算出器6は、VR型レゾルバ5からの2つの検出信号V1,V2に基づいて、電気角θを算出する。
(もっと読む)
モータ制御装置及びこれを備えたモータシステム
【課題】スパイクノイズ成分を除去し、正確な位置検出信号を生成することができるモータ制御装置を提供する。
【解決手段】本発明に係るモータ制御装置は、ブラシレスモータの誘起電圧に、誘起電圧の立ち上がり時に発生する第1スパイクノイズと、誘起電圧の立ち下がり時に発生する第2スパイクノイズとが、規則的に重畳されたブラシレスモータの端子電圧と、しきい値とを比較することによって生成された端子電圧検出信号を入力し、第1及び第2スパイクノイズが発生する規則性にしたがって、端子電圧検出信号から、第1スパイクノイズ及び第2スパイクノイズのエッジをマスクすることにより位置検出信号を生成するスパイクノイズマスク回路と、位置検出信号に基づいて、ブラシレスモータの複数相の固定子巻線の通電相を切り替える制御信号を生成するモータ制御部を有する。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】高回転・高電流時に誘起電圧の歪みによる誘起電圧補償誤差が著しく大きくなる場合に、誘起電圧補償誤差を低減させるようにしたモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】3以上の相数nの電動モータ12を駆動するモータ駆動制御装置であって、前記電動モータを駆動する電流指令値を演算する電流指令値演算部82と、前記電動モータのモータ角度を検出するモータ角度検出部13と、前記電動モータのモータ角速度を検出するモータ角速度検出部80と、前記モータ角速度で回転するd−q座標に沿って演算されたd軸電流及びq軸電流値の少なくとも一方と、前記モータ角速度及び前記モータ角度とに基づいて補償用誘起電圧を演算する補償誘起電圧演算部84とを備え、前記電動モータの誘起電圧を前記補償誘起電圧演算部で演算した補償用誘起電圧でフィードフォワード補償する。
(もっと読む)
ブラシレスモータの制御装置
【課題】ソフトウェア処理により磁極信号に重畳するノイズや波形振動を除去して駆動制
御の精度を維持でき、回路構成の簡易なブラシレスモータの制御装置を提供する。
【解決手段】回転磁石形ブラシレスモータの複数の磁極信号SMU、SMV、SMWの立
ち上がりタイミングおよび立ち下がりタイミング(t1〜t10)を検出するタイミング
検出手段と、複数の磁極信号にノイズn1が重畳していない状態において前記タイミング
が発生する正規順序(エッジ変数EG=1〜6)を記憶する順序記憶手段と、検出された
前記タイミングの発生順序と正規順序とを比較する順序比較手段と、順序比較手段の比較
結果に基づいて、複数の磁極信号に重畳したノイズn1を除去(発生時刻t6およびt7
を破棄)するノイズ除去手段と、を備える。
(もっと読む)
モータ回転数検出装置
【課題】モータの実際の回転数からかけ離れた回転数が検出されることを抑制するモータ回転数検出装置を提供する。
【解決手段】モータ回転数検出装置では、測定部43が測定したパルス信号の周期を記憶部42が周期データとして順次記憶する。演算部41は、記憶部42が周期データを記憶するごとに、記憶された周期データのうち新しい方から所定個数分の移動平均値を演算し、その移動平均値から第1ファンモータ101および第2ファンモータ102の回転数を演算する。これによって、ノイズがパルス信号として受信され、異常値が周期データとして記憶された場合でも、所定個数分の周期データの移動平均によってその異常値が平滑されるので、実際の回転数からかけ離れた回転数が算出されることは抑制される。
(もっと読む)
モータ駆動装置及び画像形成装置
【課題】アブソリュート方式のロータリーエンコーダーを用いることなく、従来よりもモータの駆動音を低減する。
【解決手段】ホールセンサ2によって検出可能な最小の回転角変位量よりも小さい所定の角度でモータ1の回転子が回転する毎に、所定のパルス信号を発信する回転パルス発生手段たるFG信号発電機3と、FG信号発電機3から出力されるパルス信号に基づいて計数処理を行う図示しないFG信号カウント部を有する絶対位相信号生成手段10とを設けるとともに、ホールセンサ2から出力されるホール信号とFG信号カウント部による計数結果とに基づいて正弦波状の駆動電流を生成するように、モータ駆動信号生成手段20を構成した。
(もっと読む)
圧縮機駆動装置および冷凍サイクル装置
【課題】スイッチ素子の特性を生かし、安価で電磁ノイズを低減した圧縮機駆動装置およびこれを用いた冷凍サイクル装置を提供する。
【解決手段】本圧縮機駆動装置は、圧縮機モータの2組の相巻線の各々に給電する2個のインバータ回路を備え、一方側のインバータ回路のスイッチング素子のうち、少なくとも1つは、ワイドバンドギャップ化合物半導体素子からなり、一方側のインバータ回路中でワイドバンドギャップ化合物半導体素子がスイッチング素子に使用されている回路中の位置に対応する位置にある他方側のインバータ回路のスイッチング素子のうち、少なくとも1つが、ワイドバンドギャップ化合物半導体素子より遅いスイッチングスピードの半導体素子からなる。
(もっと読む)
1 - 20 / 73
[ Back to top ]