
Fターム[5H560RR02]の内容
無整流子電動機の制御 (40,007) | 目的・対策 (1,913) | 同時導通(アーム短絡) (25)
Fターム[5H560RR02]に分類される特許
1 - 20 / 25
電動パワーステアリング装置
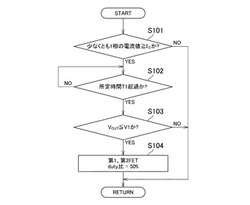
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
回転機の制御装置

【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部22では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。高周波電圧指令信号と指令電流とが直交する設定を採用する。
(もっと読む)
電動パワーステアリング装置
【課題】
モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】
回転角補正演算手段は、モータの回転角が所定範囲内にあり、モータの回転角が所定範囲内で増加している場合には、モータの回転角を、モータの回転角の所定範囲内の最大値に固定し、モータの回転角が所定範囲内で減少している場合には、モータの回転角を、モータの回転角の所定範囲内の最小値に固定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ近傍の所定範囲内にある場合には、モータの回転角速度に応じて各相のデッドタイム補償量を変え、回転角速度の絶対値が所定値より小さい場合には、回転角速度の絶対値が小さくなるに従い、各相のデッドタイム補償量を漸減させる。
(もっと読む)
ブラシレスDCモータおよびそれを搭載した電気機器
【課題】小型軽量で取り付けや配線も容易であり、かつ信頼性の高いブラシレスDCモータや、それを搭載した電気機器が提供されることを望まれている。
【解決手段】ブラシレスDCモータは、複数相の駆動コイルを有するステータ組立と永久磁石を有するロータ組立とを含み、駆動コイルを駆動する駆動回路を搭載したプリント配線板を内蔵して成り、この駆動回路は、駆動コイルに電力を供給するMOSFETと、MOSFETを制御するゲートドライバと、ゲートドライバにPWM信号を供給するプリドライバとを備え、プリント配線板は、MOSFETとゲートドライバとをモールド樹脂材料で一体化したパワーモジュールを搭載し、パワーモジュール内にMOSFETの電気的強度を設定するための設定部を含む。
(もっと読む)
モータ制御装置
【課題】目標デューティ比が高い場合でも同期整流を有効に実施することができるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、目標デューティ比が予め定められているデューティ比以上であるか否かを判断するデューティ比比較手段46と、目標デューティ比が予め定められているデューティ比以上である場合には、正相PWM制御信号のキャリア周期を目標デューティ比に応じて増減させるキャリア周期設定手段48と、目標デューティ比が予め定められているデューティ比以上である場合には、正相PWM制御信号のオフ時間を所定の時間に固定するオフ時間設定手段50と、正相PWM制御信号のオフ時間にオン状態となる逆相PWM信号生成手段52と、正相PWM制御信号および逆相PWM制御信号を遅延させる遅延手段62とを備える。
(もっと読む)
モータ制御装置
【課題】モータの入出力効率を向上する同期整流制御を行うモータ制御装置を提供する。
【解決手段】モータ制御装置1は、直流電源BTからモータMに供給される電流の電流値が電流閾値未満であるときは、正相PWM制御信号生成手段51から供給される正相PWM制御信号を選択して出力し、電流値が電流閾値以上であるときは、正相PWM制御信号生成手段52から供給される正相PWM制御信号および逆相PWM制御信号生成手段53から供給される逆相PWM制御信号を選択して出力する選択手段62を備える。
(もっと読む)
回転機の制御装置
【課題】中性点が第1の直流電源に接続された電動機の端子を第2の直流電源の正極及び負極のそれぞれに接続するスイッチング素子を備える電力変換回路を操作することで前記電動機の制御量を制御するに際し、トルクに変動が生じること。
【解決手段】指令電圧を操作することで、電動機の各相の相電流の極性の反転を回避する極性反転回避制御を行う。詳しくは、相電流がゼロとなる点に対する相電流の振幅中心である電流オフセット量が相電流の振幅値以上となるようにフィードバック制御すべく、指令電圧を操作する。これは、振幅値よりも電流オフセット量の方が小さい場合、指令電圧を負側にオフセット操作することで行うことができる。
(もっと読む)
モータ駆動回路、ファンモータ、電子機器、及びノート型パーソナルコンピュータ
【課題】貫通電流を抑制する。
【解決手段】モータ駆動回路は、接続点の電圧がモータコイルの一端に印加される駆動電圧となる、直列に接続された第1及び第2トランジスタと、駆動電圧を帰還制御し、駆動電圧を、モータコイルの駆動を制御するための第1及び第2制御電圧の差に応じた電圧とすべく、第1及び第2トランジスタを制御するオペアンプと、第1トランジスタの電流増加に応じて第2トランジスタの電流を減少させるべく第2トランジスタを制御し、第2トランジスタの電流増加に応じて第1トランジスタの電流を減少させるべく第1トランジスタを制御する電流制御回路とを備える。
(もっと読む)
自励発振インバータ電力増幅器
【課題】簡単な回路構成により、小出力時の歪みとオフセットを改善できるようにしたインバータ電力増幅器を提案すること。
【解決手段】自励発振インバータ三相電力増幅器1においては、三角波発振器を使わずに、インバータ出力5s〜7sを積分器11〜13に接続して三角波11s〜13sを生成し、この三角波11s〜13sをヒステリシスコンパレータ14〜16で閾値と比較してオンオフ2値信号2s〜4sを生成し、この信号2s〜4sでインバータ5〜7を駆動するようにしている。この場合、インバータ出力端から積分器11〜13およびヒステリシスコンパレータ14〜16を通ってインバータ入力端に入る信号がインバータ出力5s〜7sを反転させる極性で接続される。
(もっと読む)
ブラシレスモータ起動装置
【課題】より早く回転子の速度を目標周波数に整定させることが可能なブラシレスモータ起動装置を提供する。
【解決手段】ブラシレスモータのコイルに接続され、前記ブラシレスモータの回転子が停止している状態からの起動時に、前記コイルに起動電流を供給するブラシレスモータ起動装置であって、前記コイルへの出力電圧が、所定の駆動波形に基づいて周期的に変化し、前記駆動波形の起動周波数が速度指令信号に基づいて変化すると共に、前記駆動波形の振幅が振幅指令信号に基づいて変化し、前記ブラシレスモータの起動時において、前記速度指令信号および前記振幅指令信号は、それぞれ所定の速度プロファイルおよび振幅プロファイルに従った波形である構成となっている。
(もっと読む)
電動機制御回路
【課題】電圧制御を行うことができ、出力波形が良好で、軽量小型化された、DC/DCコンバータを用いた電動機駆動回路を提供する。
【解決手段】単巻変圧器Trの中間端子Cに直流電源の一方の極が接続され、両端の端子にスイッチング素子TRa,TRbが接続されている。出力側は、単巻変圧器の両端の端子と中間端子に対して対称の位置に複数のタップ端子設けられ、半導体スイッチング素子THa1〜THa3,THb1〜THb3,THnが接続されている、TRa,TRbは交互に開閉する。TRa,TRbと同期して、THb1,THa1を開閉すれば2Eの電圧が出力され、THb2,THa2を開閉すれば5E/3の電圧が出力され、THb3,THa3を開閉すれば4E/3の電圧が出力され、THnを開閉すればEの電圧が出力され、THa3,THb3を開閉すれば2E/3の電圧が出力され、THa2,THb2を開閉すればE/3の電圧が出力される。
(もっと読む)
モータ駆動用半導体装置とそれを有するモータ及びモータ駆動装置並びに空調機
【課題】マイコン等の制御用半導体装置を用い、正弦波駆動方式によるモータのトルクリップルの低減を行うときの、信頼性低下を防ぐ。
【解決手段】本発明のモータ駆動用半導体装置は、3相モータを駆動する6個のスイッチング素子と、前記3相モータのコイルの3端子それぞれへ出力電圧を印加する3個の出力端子と、前記6個のスイッチング素子を駆動する駆動回路と、前記6個のスイッチング素子それぞれをオン/オフ制御する6個の制御信号を入力する6個の制御信号入力端子とを備え、少なくとも1つの半導体チップをワンパッケージに樹脂封止したモータ駆動用半導体装置であり、前記6個の制御信号に対しデッドタイムを生成するデッドタイム生成機能を備えていることを特徴とする。
(もっと読む)
インバータ装置
【課題】 逆電圧印加回路が故障した場合のMOSFETの過熱や破壊を防ぐことができる安全性にすぐれたインバータ装置を提供する。
【解決手段】 スイッチング回路1の各直列回路におけるMOSFETに還流電流が流れるとき、そのMOSFETと同じ直列回路の他方のスイッチング素子のオンに先立ち、同MOSFETにおける逆回復電流の抑制用として、同MOSFETに逆電圧印加回路から逆電圧を印加する。この逆電圧印加回路が不動作の故障を起こした場合、MOSFETにおける逆回復電流が発生する頻度を低減する。
(もっと読む)
インバータ装置
【課題】デッドタイム期間においても相電流の検出を可能とすることで、サンプリング期間を長くして精度の高いモータ制御を行う。
【解決手段】上下一対のアームにスイッチング素子と当該素子に並列接続されたダイオードとを有し、下アームにモータの相電流を検出するための抵抗が接続されたインバータ回路において、上アームのスイッチング素子Q1と下アームのスイッチング素子Q2が共にOFFとなっているデッドタイム期間に、ダイオードD2を通して流れる相電流Iによって相電流検出抵抗Ruに生じる電圧をサンプリングするようにした。
(もっと読む)
電動パワーステアリング制御装置、および方法
【課題】電動パワーステアリング制御装置において、三角波の山または谷から所定時間経過後にA/D変換を開始することにより、安定したA/D変換を実現する。
【解決手段】三角波とは別に、A/D開始レジスタに所望のタイマ値を設定し、アナログ信号の所望のタイミングでA/D変換を開始する。A/D変換が終了した後、制御開始タイマで定められたタイミングで制御処理を実行する。モータ駆動電流のオンのパルスの中間でA/D変換を開始することにより、ノイズの影響を抑えながら安定した制御を行うことが可能となる。
(もっと読む)
インバータ装置、モータ装置、伝達比可変装置、および操舵補助装置
【課題】電源電圧が変動しても、出力電流が変化しないインバータ装置を提供する。
【解決手段】互いに対となる上下のスイッチング素子T1〜T6のオンオフ状態が切り替えられることより、直流を交流に変換するインバータ回路60と、そのスイッチング素子T1〜T6のオンオフを制御するためのパルス信号を生成するパルス生成回路56と、そのパルス生成回路56へ指令値を出力する指令値演算部50とを有するインバータ装置24において、補正関係記憶部62に、バッテリ電圧から補正量が定まる補正関係を記憶し、指令値補正部54では、その補正関係と実際のバッテリ電圧とに基づいて補正量を決定し、指令値Vu、Vv*、Vw*をその決定した補正量を用いて補正する。このようにすれば、バッテリ電圧の変動によって、モータ電流Iu、Iv、Iwが変動してしまうことが抑制される。
(もっと読む)
ブラシレスDCモータおよびそれを搭載した電気機器
ブラシレスDCモータは、複数相の駆動コイルを有するステータ組立と永久磁石を有するロータ組立とを含み、駆動コイルを駆動する駆動回路を搭載したプリント配線板を内蔵して成り、この駆動回路は、駆動コイルに電力を供給するMOSFETと、MOSFETを制御するゲートドライバと、ゲートドライバにPWM信号を供給するプリドライバとを備え、プリント配線板は、MOSFETとゲートドライバとをモールド樹脂材料で一体化したパワーモジュールを搭載し、パワーモジュール内にMOSFETの電気的強度を設定するための設定部を含む。  (もっと読む)
(もっと読む)
モータ駆動装置
【課題】 適切な昇圧電圧を発生でき、当該昇圧電圧を用いてモータを駆動するモータ駆動装置を提供する。
【解決手段】 FETのゲートと、ツェナーダイオードZD13を三相ブラシレスモータ400との間に配置し、ツェナーダイオードZD13のツェナー電位を超えるまで、三相ブラシレスモータ400から抵抗R11側に流れる電流を遮断する。その後、三相ブラシレスモータ400と抵抗R11との電圧がツェナー電位を超えた場合には、抵抗R11側に電流が流れてしまうが、当該電流値は小さくなっており、抵抗R11や抵抗R12の焼損を防止する。
(もっと読む)
モータ駆動回路
【課題】 従来のモータ駆動回路で、入力されたPWM信号を基準にデッドタイムを生成すると、実際の駆動信号のHi時間がPWM信号のHi時間からデッドタイム分少なくなってしまい、指示デューティと実駆動デューティとが異なるためCPUのPWM演算に補正が必要となり、CPU演算の負荷が高くなるという問題があった。
【解決手段】 入力された回転方向指示信号DIRおよびPWMデューティ指示信号に基づいてモータ駆動回路のHiサイド駆動信号VHおよびLoサイド駆動信号を生成する回路であって、Hiサイド駆動信号VHは、デジタル信号処理によりPWMデューティ指示信号にデッドタイムTDTを付加して生成される信号であって、PWMデューティ指示信号の立ち下がりエッジからデッドタイム経過後にLo出力からHi出力に切り換わり、PWM信号の立ち上がりエッジよりデッドタイム分だけ前の時点でHi出力からLo出力に切り換わる信号である。
(もっと読む)
1 - 20 / 25
[ Back to top ]