
Fターム[5H560TT04]の内容
無整流子電動機の制御 (40,007) | 回路要素 (3,527) | フリップフロップ (52)
Fターム[5H560TT04]に分類される特許
1 - 20 / 52
単相ブラシレスモータ制御装置
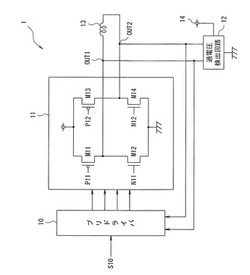
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
モータ駆動回路、方法およびそれを用いた冷却装置、電子機器

【課題】より効率的にモータを駆動可能な駆動装置を提供する。
【解決手段】ゼロクロス検出コンパレータ10は、ファンモータ6のロータの位置を示す互いに逆相のホール信号のペアH+、H−を比較し、それらが交差するゼロクロスタイミングごとにレベルが遷移するゼロクロス検出信号S1を生成する。制御回路20は、ゼロクロス検出信号S1を受け、(1)ゼロクロスタイミングごとに駆動相を切りかえ、モータを回転駆動するとともに、(2)各ゼロクロスタイミングより第1時間幅τ1前の第1時刻から、各ゼロクロスタイミングより第1時間幅τ1よりも短い第2時間幅τ2後の第2時刻までの間、モータを回生制御する。
(もっと読む)
位置検出装置およびモータ駆動装置
【課題】主に、変位検出部の検出分解能を変更することなく、検出する位置情報の分解能を設定、変更することができるようにする。
【解決手段】位置検出部(エンコーダ1、ホールIC6)と、変位検出部(エンコーダ1)と、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)とを備える。そして、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)を、変位パルス(エンコーダパルスenca)のエッジが所定の区間エッジ数(分周比分母DEN)だけ到来する間に、区間エッジ数(分周比分母DEN)よりも小さい所定の非カウント数(分周比分母DENと分周比分子NUMとの差)だけ変位パルス(エンコーダパルスenca)のエッジをマスクしてカウントし得るように構成する。
(もっと読む)
モータ制御装置及びこれを備えたモータシステム
【課題】スパイクノイズ成分を除去し、正確な位置検出信号を生成することができるモータ制御装置を提供する。
【解決手段】本発明に係るモータ制御装置は、ブラシレスモータの誘起電圧に、誘起電圧の立ち上がり時に発生する第1スパイクノイズと、誘起電圧の立ち下がり時に発生する第2スパイクノイズとが、規則的に重畳されたブラシレスモータの端子電圧と、しきい値とを比較することによって生成された端子電圧検出信号を入力し、第1及び第2スパイクノイズが発生する規則性にしたがって、端子電圧検出信号から、第1スパイクノイズ及び第2スパイクノイズのエッジをマスクすることにより位置検出信号を生成するスパイクノイズマスク回路と、位置検出信号に基づいて、ブラシレスモータの複数相の固定子巻線の通電相を切り替える制御信号を生成するモータ制御部を有する。
(もっと読む)
駆動制御信号生成回路
【課題】PWM変換を効率的に行う。
【解決手段】出力制御回路17は、モータ200からの回転状態信号の基準値のクロスを取り込むフリップフロップを有し、このフリップフロップの状態に応じてモータ駆動制御信号を発生する。クロック生成回路50は、出力制御回路12のフリップフロップにおけるデータ取り込みタイミングを規定するクロックを生成する。そして、PWM変換回路は、駆動制御信号について、前記クロックをPWM信号として、PWM変換する。
(もっと読む)
ドライブ回路の起動時制御回路
【課題】モータの起動を確実に行うと共に、静音化する。
【解決手段】モータの起動時の駆動を制御するドライブ回路の起動時制御回路であって、正負が180度で反転する交番波形であるフル駆動波形を出力するフル駆動波形出力手段と、フル駆動波形に、パルス幅変調を施しPWM駆動波形を得るPWM手段と、フル駆動波形と、PWM駆動波形のいずれかを選択するセレクタ54と、を有し、制御回路58は、セレクタ54を制御して、起動時において、フル駆動波形を出力し、その後PWM変調波形を出力するように制御する制御手段正負が180度で反転する交番波形であるフル駆動波形を出力する。その後、PWM駆動波形を選択する。
(もっと読む)
ドライブ回路
【課題】駆動制御信号を効果的に得る。
【解決手段】回転状態信号に対し、オフセット制御回路32において、オフセットを付加する。回転状態信号に対し基準値に近づく側に順次オフセットして得られた加算信号の、2度目の基準値のクロスと、その次の基準値とクロスの間で、前記正弦波状信号に比べて、所定期間だけ減少された期間の駆動制御信号を作成する。そして、1回目の基準値のクロスに対し、オフセット付加した場合に極性が判定したことを示すパルスを付加することで2度目の基準値のクロスを確実に検出する。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁束モータを駆動する可変磁束ドライブシステムにあって、可変磁石の磁束の繰り返し精度を改善し、トルク精度を向上する。
【解決手段】永久磁石を用いた永久磁石電動機1と、永久磁石電動機を駆動するインバータ4と、永久磁石の磁束を制御するための磁化電流を流す磁化手段とを備え、永久磁石はその磁束密度がインバータ4からの磁化電流によって可変できる可変磁石であり、磁化手段は、可変磁石の磁性体の磁化飽和領域以上の磁化電流を流すことを特徴とする可変磁束ドライブシステム。
(もっと読む)
ブラシレスモータの制御装置
【課題】モータの停止中に回転子が微動した場合やノイズ等が発生した場合でも、モータ駆動信号生成が誤動作するのを防止できるブラシレスモータの制御装置を提供することにある。
【解決手段】センサ信号処理回路14は、ホールIC24U,24V,24Wにより検出されたブラシレスモータ20の3相の磁極位置検出信号HU,HV,HWの内、2つの磁極位置検出信号を入力信号とし、該2つの入力信号がそれぞれH,Lを繰り返すときには、第1の出力信号sigAは、そのH,Lの繰り返しに応じて、H,Lを繰り返す信号を出力し、第2の出力信号sigBは、H又はLの一定レベルを出力し、第1の入力信号がH,Lを繰り返すが、第2の入力信号はH又はLの一定レベルのときは、第1及び第2の出力信号は、H又はLの一定レベルを出力する。
(もっと読む)
モータの駆動装置およびその冷蔵庫
【課題】モータの停止状態を検出する保護回路があるものの、回転子に近接して設置する必要のある検出部(ホール素子やサーミスタ)を用いるため、圧縮機のような過酷環境下に実装されたモータの保護回路としては不向きであるという課題があった。
【解決手段】位置検出部と停止検出部がモータに近接設置されていないことを特徴とするモータの制御装置。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】交流電圧を整流して整流電圧を供給する段階と整流電圧でモータの巻線を励起する段階とを含むブラシレスモータを制御する方法。巻線は、進み期間だけ所定の回転子位置に先行して励起され、かつモータの各電気半サイクルにわたって導通期間中に励起される。進み期間及び導通期間の少なくとも一方の長さは、時間と共に周期的に変わる波形によって定められ、本方法は、モータ速度及び交流電圧のRMS値のうちの一方の変化に応答して交流電圧に対する波形の位相を調節する段階を含む。更に、本方法を実現する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】モータの各電気半サイクルにわたる導電期間にわたってモータの巻線を励起する段階を含むブラシレスモータを制御する方法。導電期間の長さは、周期的に時間と共に変わる波形によって定められる。更に、本方法を実行する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】進み期間だけ所定の回転子位置に先行してモータの巻線を励起する段階を含むブラシレスモータを制御する方法。進み期間の長さは、時間と共に周期的に変わる波形によって定められる。更に、本方法を実施する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
モータ駆動装置
【課題】専用のスタート/ストップ指令端子を持たない仕様であってもフリーラン制御可能にし、また、設定回転速度にモータを引き込む際に安定であって、引き込みまでの時間を短縮可能にする。
【解決手段】モータ駆動装置は、通電相切換部(30)と、パワ段(10)と、PWM制御部(40)と、トルク指令信号と比較基準信号との電圧レベルを比較するトルク比較部(60)と、比較基準信号を生成する比較基準信号生成部(50)と、トルク指令信号の電圧レベルが比較基準信号の電圧レベルよりも高い場合にはパワ段(10)を同期整流PWM駆動し、トルク指令信号の電圧レベルが比較基準信号の電圧レベルよりも低い場合には同期整流PWM駆動以外でパワ段(10)を駆動する通電制御部(20)とを備えている。
(もっと読む)
モータ制御装置及びそれを用いたDCモータ並びにポンプ
【課題】広範囲に亘ってモータの能力制御が可能な小型のモータ制御装置を低コストで実現するとともに、このモータ制御装置を用いたDCモータ並びにポンプを提供する。
【解決手段】モータ制御装置Aは、DCモータ5のロータ52の回転位置を検出する位置センサ4と、位置センサ4の検出結果に基づいてDCモータ5の各巻線51の通電角を制御する制御部1とを備える。制御部1は、位置センサ4より出力されるセンサ信号HU,HV,HWから各巻線51の基準通電角を決定する分配回路12と、外部より入力される能力可変信号Sig1に合わせて基準通電角を変更することで各巻線51の通電角を決定する通電角制御信号発生回路11とを有する。
(もっと読む)
モータ駆動騒音低減装置およびモータ駆動騒音低減信号の作成方法
【課題】モータの各相巻線に方形波電流を流すと、電流に急激な変化に起因してトルクの変動が大きいので、モータの各相巻線に相切り替え時においても連続して変化する電流を流すが、各相同士が短絡して、本来電流を流さなくてはならないのに、電流が流れないという課題があった。
【解決手段】転流制御信号に基づいて前記電流増加用信号または電流減少用信号を選択出力する選択回路と、この選択回路で選択された電流増加用信号または電流減少用信号を前記スイッチング素子対の電源側スイッチング素子に供給する通電制御信号と合成する信号合成回路を備えたものである。
(もっと読む)
ブラシレスモータの駆動装置
【課題】定常回転でも安定した回転が得られ、かつ処理時間を低減したブラシレスモータの駆動装置を提供する。
【解決手段】ブラシレスモータの駆動装置10は、回転速度検出部19から供給される回転速度信号に基づいて第1駆動波形PWM信号と第2駆動波形PWM信号の切替の判定をし、いずれの信号を出力するかの指令信号を駆動切替部14に供給する駆動切替判定部20と、を備え、駆動切替判定部20は、回転速度が加速または減速であるときは、第1のしきい値と第2のしきい値は、同一の値とし、回転速度が定常であるときは、第1のしきい値と第2のしきい値は、異なる値とし、回転速度が、第1のしきい値より大きいときは、第2駆動波形PWM信号を出力する判定をし、第2のしきい値より小さいときは、第1駆動波形PWM信号を出力する判定をし駆動切替部14に指令信号を供給する。
(もっと読む)
速度限定トルク制御
モータ(DCモータなど)及びモータ駆動方法とシステムを開示している。選択事項として、モータは電子式整流子モータである。モータは、1以上の電磁石及び該電磁石を制御する制御装置を備える。前記制御装置は、動作希望速度を出すのに必要なトルクを決定するために、特定の設備において前記モータの動作を校正するように構成されるが、前記校正機能は、前記モータを希望速度まで進入させる過程と、前記希望速度にてモータが動作するのに必要な電流を測定する過程と、前記測定された電流を用いて第1の速度タップに相当する値を設定する過程と、を含む。制御装置は、少なくとも、前記校正機能を完了した後に前記設定値を用いて実質的に一定のトルクモード(定トルクモード)において前記モータを駆動するように構成される。前記モータは、HVACRシステムなどの喚風システムに用いるように構成してもよい。 (もっと読む)
加減速検出回路
【課題】
電源電圧の異常な上昇を防止し、トランジスタやモータの損傷や破壊を防止することができる加減速検出回路を提供する。
【解決手段】
モータの回転速度の一定状態、加速状態、または減速状態を検出する加減速検出回路(100)は、モータに取り付けられたホールセンサから出力されるホール信号(HU)の1周期に内挿される内挿パルス信号(DIVCLK)を生成するパルス生成部(110)と、内挿パルス信号(DIVCLK)の数をホール信号(HU)の1周期の期間内でカウントするカウンタ(121)と、カウンタ(121)のカウント値に応じて所定の加速判定パルス(Ja)または減速判定パルス(Jb)を出力する比較回路(122、123)を備える。
(もっと読む)
高速電気システム
【課題】高速電気システム、特に、単相永久磁石電気機械を含むシステム、更に、電気システムを含む製品を提供する。
【解決手段】単相永久磁石電気機械と60krpmを超える速度での負荷の下で電気機械を駆動するための制御システムとを含み、制御システムが、電気機械の巻線を順次励起してフリーホイールさせ、かつ巻線が励起される時間及び該巻線がフリーホイールされる時間を変更することを特徴とする電気システム、を備える。
(もっと読む)
1 - 20 / 52
[ Back to top ]