
Fターム[5H560TT08]の内容
無整流子電動機の制御 (40,007) | 回路要素 (3,527) | フィルタ (254)
Fターム[5H560TT08]の下位に属するFターム
デジタルフィルタ (17)
Fターム[5H560TT08]に分類される特許
1 - 20 / 237
モータ駆動装置
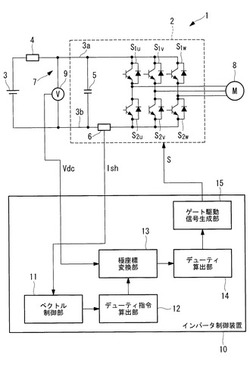
【課題】直流電源から電力供給を受けるモータ駆動装置において、1パルス制御の実行中に、直流電源に流れる電流に含まれるリップルを抑制することのできるモータ駆動装置を提供することを目的とする。
【解決手段】直流電源3から直流母線を介して入力される直流電力を三相交流電力に変換してIPMモータ8に出力するインバータ2と、電気角1周期の間に、各相に対応するスイッチング素子に対して正負1パルスの矩形波電圧をゲート駆動信号として印加する1パルス制御モードを有するインバータ制御装置10とを備え、インバータ制御装置10は、1パルス制御モードを実行する場合に、矩形波電圧の立ち上がり時および立ち下がり時において、所定の位相角幅でデューティを徐々に増加または減少させるモータ駆動装置1を提供する。
(もっと読む)
車両用操舵装置

【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2の出力を用いて、モータ1が駆動される。レゾルバ2の故障時には、位置推定部60が演算する推定回転位置を用いて、センサレス制御によって、モータ1が駆動される。また、センサレス制御が行われる場合において、低速域用位置推定部61によってロータ回転位置の推定が行われる低速域では、目標電流上限値が、一定以上のロータ位置推定精度が得られる値に制限される。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
ブロアモータ駆動装置
【課題】ブロアモータ側に付いている制御装置の基準クロックである動作クロックの精度が低いブロアモータ制御装置でも、実回転速度の検出誤差を抑制し、バラツキの少ない回転動作を可能とする。
【解決手段】上位システムからPWM信号デューティ比を用いて、目標回転速度を与えられるブロアモータ駆動装置であり、PWM信号の周期誤差を算出し、位置検出センサから算出されたロータ回転速度を、周期誤差に基づき乗算補正し速度制御を実施する。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置
【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
駆動装置、及び駆動方法
【課題】モータの負荷が大きい場合において誘起電圧に基づいてモータを駆動させる。
【解決手段】駆動装置は、モータのコイルに通電するインバータ回路と、各コイルに生じる誘起電圧と等価中性点電位との比較結果を示すパルス信号を生成する誘起電圧インターフェース回路と、コイルに流す電流の向きを示す複数の通電パターンを用いて通電を行い、所定の電流値に達するまでの通電時間に基づいてロータが停止している位置を検出する停止磁極位置検出部と、停止磁極位置検出が検出したロータの位置に基づいて選択した通電パターンで通電を行いロータにトルクを加えた後に、誘起電圧インターフェース回路が出力するパルス信号のレベルに基づいてロータにトルクを加える通電パターンを選択し、選択した通電パターンで通電をインバータ回路に行わせる起動通電を行った後に誘起電圧に基づいた制御を行う通電制御部とを備える。
(もっと読む)
ブラシレスモータの制御装置及び制御方法
【課題】コンパレータの出力信号にチャタリングが発生し、ロータ位置を誤検出してしまうことを防止し、ロータの位置検出精度を向上させることができるブラシレスモータの制御装置を提供する。
【解決手段】ロータとステータを備えるブラシレスモータの回転駆動を制御する制御装置であって、ブラシレスモータの始動時にロータの停止位置に合わせた励磁パターンを初期通電時間だけブラシレスモータに通電した後、通電を停止してブラシレスモータのロータをフリーランさせる回転制御手段と、フリーラン中に発生する誘起電圧のエッジ検出を割り込みによって検出することによりロータの位置を検出する際に、ロータの回転方向毎に、次に検出されるべきエッジ検出の割り込みのみを許可した状態において、検出されたエッジの相と向きに基づきロータ位置を確定する回転方向判定手段とを備える。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
1 - 20 / 237
[ Back to top ]