
Fターム[5H560XA15]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | 進み位相(進角)制御 (256)
Fターム[5H560XA15]に分類される特許
1 - 20 / 256
コンベヤ駆動装置
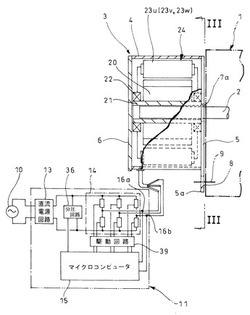
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器

【課題】安定制御可能な範囲を拡張し、多様なモータに対応したモータ駆動装置を提供すること。
【解決手段】ブラシレスDCモータ4に流れる電流を取得する電流検出部7と、電流検出部7で検出された電流値がブラシレスDCモータ4の駆動している速度とは異なる周期での変化を検出し結果によって通電角を120度以上180度未満の間で変更する通電角変更部8と、電流検出部7が取得した電流の位相と所定の関係を有する波形で、かつ、周波数設定部9で設定した周波数で通電角変更部8によって決定された通電角の波形である第2の波形信号を出力することにより、電流状態に応じて安定制御可能な通電角へと変更を行うこととなり、電流と印可電圧の位相差の補正による制御可能な範囲を拡張し、更に多様なモータやモータ出力に対応するモータ駆動装置を提供可能となる。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
半導体装置及びモータ駆動装置
【課題】簡単な構成でモータの進角を適切に制御できる半導体装置を提供する。
【解決手段】一実施形態によれば、半導体装置は、制御信号生成部と、上限電圧制限部と、進角データ生成部と、を備える。前記半導体装置は、モータを駆動するモータ駆動信号の進角を制御する。前記制御信号生成部は、前記モータに流れる電流に応じた制御信号を生成する。前記上限電圧制限部は、前記制御信号の最大値を、供給された上限電圧に制限した進角制御信号を出力する。前記進角データ生成部は、前記進角を表す進角データと前記進角制御信号との関係線を生成し、前記関係線と前記進角制御信号とに基づいて前記進角データを生成する。前記関係線は、下限点から変化点を通って上限点に至る。前記変化点は、前記進角制御信号が前記上限電圧未満の変化点電圧であり、且つ、前記進角データが前記進角設定電圧に応じた進角を表す点である。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】PWM信号のデューティ値が小さくPWM信号がオンとなる時間が短い場合、強制的に転流を継続する強制同期転流によってモータの運転状態を維持し、インバータ出力電圧に対する誘起電圧位相の状態に応じてインバータ出力電圧を変化させることで、強制同期転流時の安定したモータ動作を実現すること。
【解決手段】出力電圧に対するロータ誘起電圧位相を所定の位相に保つ位相差判定手段210と、ブラシレスDCモータの目標回転数に応じて所定の周波数で予め設定した転流波形を出力する強制同期転流制御手段211を備え、PWM制御デューティ値が所定の値より小さくなった場合、強制同期転流により動作するとともにロータ位相の変化状態に応じて出力電圧を変化させるので安定したモータ動作を実現することができる。
(もっと読む)
モータ駆動装置及びモータの駆動制御方法
【課題】安価な回路構成で一般的な制御方法による起動を行うとともに、エラー発生時には適切なリカバリー動作を実現する。
【解決手段】モータの駆動開始時には、第1の駆動手段によってモータを駆動した後、第2の駆動手段によってモータを駆動するように、第1の駆動手段と第2の駆動手段とを切り替える制御手段と、を有し、第1の駆動手段は、所定の駆動周波数でオープンループ制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の駆動周波数よりも低い駆動周波数でモータを駆動し、第2の駆動手段は、所定の加速度でフィードバック制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の加速度よりも低い加速度でモータを駆動する。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
ブロアモータ駆動装置
【課題】ブロアモータ側に付いている制御装置の基準クロックである動作クロックの精度が低いブロアモータ制御装置でも、実回転速度の検出誤差を抑制し、バラツキの少ない回転動作を可能とする。
【解決手段】上位システムからPWM信号デューティ比を用いて、目標回転速度を与えられるブロアモータ駆動装置であり、PWM信号の周期誤差を算出し、位置検出センサから算出されたロータ回転速度を、周期誤差に基づき乗算補正し速度制御を実施する。
(もっと読む)
モータ駆動装置及びモータ駆動装置の制御方法
【課題】モータを駆動装置に組み込んだ後でも、ロータ位置検出部の位置ずれ量を特定するできるモータ駆動装置を提供する。
【解決手段】駆動パルス制御部703がステッピングモータ1をオープンループ駆動することで、ステッピングモータ1がレンズ鏡筒ユニット8を駆動し、カムピン901がカム902のカム領域904をトレースする際に、信号時刻差算出部703aの出力に基づいて、駆動パルス制御部703は磁気センサ6の位置ずれ量を特定する。そして、ステッピングモータ1をフィードバック駆動する際に、駆動パルス制御部703は磁気センサ6の位置ずれ量を補正する。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
モータの駆動制御装置
【課題】簡素な回路構成と処理プロセスとで高効率にモータを駆動させることができるモータの駆動制御装置を提供する。
【解決手段】モータの駆動制御装置1は、モータ駆動制御部3の出力部6からモータ2の巻線に電力を供給し、モータ2を駆動する。モータ駆動制御部3は、指令情報生成部4と、駆動信号生成部5とを有している。指令情報生成部4には、モータ2の巻線電流情報と回転速度情報との組合せ対応する進角値群が予め記憶されている。指令情報生成部4は、モータ2の巻線電流情報と回転速度情報との組合せに応じて、進角値群から最適進角値を選択し、駆動信号生成部5に、最適進角値情報と速度指令情報とを出力する。駆動信号生成部5は、最適進角値情報と速度指令情報とに応じて、モータ2の駆動信号を出力部6に出力する。最適進角値は、モータ2の回転速度と巻線電流とに応じて、複雑な演算を必要とせずに求められる。
(もっと読む)
駆動装置
【課題】電動機を駆動するためのインバータの制御モードを矩形波制御モードから正弦波制御モードに切り替える際の電動機の出力トルクの変動を抑制する。
【解決手段】駆動電圧系の電圧VHの上昇を伴って矩形波制御モードから正弦波制御モードに切り替えるときには、矩形波制御モードから過変調制御モードに切り替えて(S200)、電流指令Id*,Iq*を保持してインバータを制御すると共に電圧VHが切替目標電圧VHchまで上昇するよう昇圧コンバータを制御し(S210〜S230)、電圧VHが保持されるよう昇圧コンバータを制御すると共に電流指令Id*,Iq*を切替目標電流Idch,Iqchに向けて等トルクライン上を移動させながらインバータを制御し(S240〜S260)、過変調制御モードから正弦波制御モードに切り替える(S270)。
(もっと読む)
二相ブラシレスモータの駆動装置及び駆動方法
【課題】2つのステータコイルに位相差のある電流を流すことにより効率を向上させ、中性点のない直流電源に対しても適用可能な二相ブラシレスモータの駆動装置を提供する。
【解決手段】2相結線された少なくとも2つのステータコイル13,14への通電を行うスイッチング回路12と、前記少なくとも2つのステータコイル13,14への通電を同時に遮断することにより現れる逆起電圧に基づいて、前記各ステータコイル13,14とマグネットロータの相対位置を表すゼロクロス時点を検出するため比較回路20と、前記スイッチング回路12を制御することにより、前記各ステータコイル13,14に、位相が互いにずれた電流をそれぞれ通電させる制御回路23とを有し、前記制御回路23は、前記ゼロクロス時点に基づいてタイマーを生成し、このタイマーで前記スイッチング回路12の各素子の導通時間を決めることによって前記ステータコイル13,14の通電角を設定するものである。
(もっと読む)
ブラシレスDCモータおよびそれを搭載した送風装置
【課題】ブラシレスDCモータとそれを搭載した送風装置において、回転数に対して最適な進角値を得て高効率で低振動低騒音を実現することを目的とする。
【解決手段】ブラシレスDCモータ2の通電位相を進み位相に補正する進角補正手段10と、外部回路4からの出力指示値より前記進角補正手段10の進角値を生成する進角生成手段12を有し、前記進角生成手段12は、前記外部回路4からの出力指示値に対して閾値を設け、前記閾値を境に前記進角補正手段10の進角値をゼロから線形的に変化させる構成としたことにより、回転数に対して最適な進角値を得ることができ、高効率で低振動低騒音を実現することができる。
(もっと読む)
回転機の制御装置
【課題】半波整流を行なう際に中性点の電位を操作したのでは、各相の巻線が有効利用されているとはいい難いこと。
【解決手段】スイッチング素子Sup、Svp,Swnがオンとなる場合、スイッチング素子Snnがオン且つスイッチング素子Snpがオフとされる。ここで、スイッチング素子Snp,Snnの操作がなされないなら、スイッチング素子Sup、Svp,Swnがオンとなることで、固定子巻線の接続点の電位(中性点電位)は、「VDC/2」よりも高くなる。これに対し、スイッチング素子Snnをオンとすると、中性点電位は、「0」となる。このため、スイッチング素子Sup,Svpに流れる電流が増大し、ひいてはモータジェネレータ10に流れる電流が増大することで、スイッチング素子Snnによって中性点電位を操作しない場合と比較して、モータジェネレータのトルクが大きくなる。
(もっと読む)
モータ駆動装置
【課題】モータを安定的に駆動し且つ広い範囲で進角制御する。
【解決手段】モータを駆動するモータ駆動装置10は、モータの所定電気角の回転毎に磁極割込パルス信号を生成し、生成した磁極割込パルス信号に基づいて、モータの角加速度(ΔRPM)を求め、角加速度(ΔRPM)に対応する数(m)のパルス信号に基づいて、予め設定されている進み角の位置を定め、求めた進み角の位置で、相電流を切り換えることで、モータの遅延補償を行う。
(もっと読む)
1 - 20 / 256
[ Back to top ]