
Fターム[5H580FA14]の内容
ステッピングモータの制御 (5,935) | 制御、演算又は駆動 (1,049) | 制御部又は演算部の構成手段 (311) | デジタル要素を含むもの (301) | 計算機を用いるもの (228)
Fターム[5H580FA14]に分類される特許
1 - 20 / 228
可動体駆動装置
【課題】遊技機に設けられた可動体を駆動するための、上位の制御装置の負荷を軽減可能な可動体駆動装置を提供する。
【解決手段】可動体駆動装置1は、遊技機に設けられた可動体の移動目的地を規定する制御コマンドを受信する通信部2と、可動体の現在位置を記憶する記憶部63と、その可動体の移動目的地と現在位置との差、またはその可動体の直前の動作における移動方向に基づいて、可動体の次の動作における移動方向を決定し、次の動作における移動方向に沿って可動体が移動目的地に達するまで可動体を移動させるように、可動を駆動する駆動ユニットを制御する制御部(61、62、7)とを有する。
(もっと読む)
光学機器

【課題】ステッピングモータを可動素子の駆動に用いた状態での負荷変動の影響による停止精度の低下や回転むらの発生を抑制する。
【解決手段】光学機器は、可動素子104を移動させるステッピングモータ108を駆動するための信号であって周期的に信号値が変化する駆動信号を生成する駆動手段111,120と、該信号値として基準信号値を設定するためのデータおよび該基準信号値を有する駆動信号によってモータ駆動したときの該モータの1ステップ駆動ごとの可動素子の目標移動量を記憶した記憶手段112と、基準信号値を有する駆動信号によりモータを実際に駆動したときの1ステップ駆動ごとの可動素子の実移動量を検出する検出手段140とを有する。駆動手段は、目標移動量と実移動量とに差があるときは、駆動信号の信号値を、上記差を小さくするように、基準信号値とは異なる信号値に変更する。
(もっと読む)
モータ制御装置および光学機器
【課題】低コストでモータ振動に対する最適な補正制御が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、可動部を移動させる駆動手段と、駆動手段に駆動信号を与えて駆動手段を制御する制御手段と、可動部の基準位置を検出するために用いられる基準位置情報および可動部の振動状態を検出するために用いられる振動状態情報を出力する検出手段とを有し、制御手段は、基準位置情報に基づいて可動部の基準位置を設定し、振動状態情報に基づいて可動部の振動量が低減するように駆動信号を補正し、可動部の移動量に対して基準位置情報は第1の変化率を有し、振動状態情報は該第1の変化率と異なる第2の変化率を有する。
(もっと読む)
遊技機
【課題】遊技の円滑な進行を妨げることなく回胴の加速処理を迅速に行って遊技興趣を増大して継続遊技の促進を図ることのできる遊技機を提供することにある。
【解決手段】1−2相励磁方式によるステッピングモータの回転駆動制御を行うに際して、加速期間中は、1相励磁よりも2相励磁の励磁時間が大になるように設定され、且つ2相励磁の時間を徐々に短くしている。加速期間中の1相励磁は最小単位時間(割込み処理1回の所要時間)に設定されている。トルクの弱い1相励磁の期間に対応するタイマ値を「1」にしてその時間を極力短くし、トルクの強い2相励磁の期間を長めに設定して、それを段階的に徐々に短くしているため、回胴起動後に速やかに定速回転状態に移行させて円滑な回胴遊技を促進することができる。
(もっと読む)
ステッピングモータの駆動制御装置および駆動制御方法、駆動制御システムならびに光学機器
【課題】ステッピングモータの振動量を簡易な構成で低減すること
【解決手段】ステッピングモータ107、108の複数の巻線を励磁する駆動信号を制御する駆動制御装置は、複数の巻線に流れる励磁電流の検出結果を取得し、A相に対応する巻線の励磁電流波形において設定された第1の基準時T01から設定電流値Ithを与える時間までの第1の時間差Taと、B相に対応する巻線の励磁電流波形において設定されて第1の基準時に対応する第2の基準時T02から設定電流値Ithを与える時間までの第2の時間差Tbとの差が減少するように駆動回路119、120をフィードバック制御するマイクロプロセッサ111を有する。
(もっと読む)
ステッピングモータ駆動装置及び画像形成装置
【課題】モータ出力トルク不足による脱調を回避する適切な励磁電流値を決定し、かつ決定された励磁電流値に応じた適切な前励磁時間を決定する。
【解決手段】ステッピングモータ47と、ステッピングモータを駆動させるステッピングモータ制御部43と、ステッピングモータが回転したかどうかを検知する着脱検知部35と、ステッピングモータに印加する電流値を指示する信号及びステッピングモータの駆動を制御する駆動制御信号をステッピングモータ制御部に出力することにより、ステッピングモータ制御部によるステッピングモータの駆動を制御するCPU40を備え、CPUは、着脱検知部35からの検知信号に基づいてステッピングモータの電流設定値を決定し、かつ、決定した電流設定値において前励磁時間を決定する。
(もっと読む)
モータ回転検知装置及び原稿読取装置
【課題】ステッピングモータが正回転、逆回転又は不回転のいずれの状態かを検知する。
【解決手段】モータ回転検知装置3はセンサ5、パルス板(光通過制御部材)、記憶部405及び判定部407を備える。センサ5は投光部7と受光部9を含む。パルス板はモータ13が正回転することにより一方の方向に回転し、かつモータ13が逆回転することにより他方の方向に回転して、投光部7から受光部9へ照射された光が通過する量を経時的に三段階異ならせる。記憶部405は投光部7からの光がパルス板に照射されて、受光部9で受光されることにより受光部9から出力され、受光量に応じて異なる大きさの出力信号について、モータ13が正回転の状態、逆回転の状態及び不回転の状態のうち少なくとも二つの状態の場合のデータを予め記憶している。判定部407は受光部9から出力される出力信号を記憶部405に記憶されているデータと比較して、モータ13が正回転、逆回転、又は不回転のいずれの状態か判定する。
(もっと読む)
電子時計
【課題】 運針周期の異なる複数の指針を複数のステップモータで運針させる電子時計において、複数の指針が同時期に運針される場合にも効率的に且つ安定したステップモータの駆動を行えるようにする。
【解決手段】 第1の指針(秒針2)を第1周期で運針する第1ステップモータと、第2の指針(分針3又は時針4)を第2周期で運針する第2ステップモータとを備えた電子時計である。そして、駆動パルスの電圧を第2周期の運針期間と重ならない第1周期の運針期間においては高い第1電圧Xに、第2周期の運針期間では低い第2電圧Zになるように制御する出力電圧制御手段(S2,S5,S8)と、第2周期の運針期間に第1ステップモータに供給される駆動パルスの幅を、第2周期の運針期間と重ならない第1周期の運針期間に供給される駆動パルスの幅より大きくする駆動パルス制御手段(S3,S6,S9)とを備えている。
(もっと読む)
ステッピングモータの制御装置およびステッピングモータの制御方法
【課題】ステッピングモータの負荷を常時モニタして、モータを脱調させることなくその時々の負荷に対して最適な駆動電流の設定を可能として、消費電力の低減を図る。
【解決手段】ステッピングモータ100を駆動する駆動電流を設定する駆動電流設定部121と、ステッピングモータ100の駆動波形から、その負荷を検出する負荷検出部124と、検出された負荷がある閾値を超えた際に、脱調の予兆があると判定する脱調予兆判定手部125と、駆動電流を可変して負荷に必要な脱調しない最小の駆動電流に設定する駆動電流最適化制御部130と、を備え、駆動電流最適化制御部130は、可変制御される所定時間が経過するごとに、脱調予兆判定部125による脱調予兆の有無情報にしたがって駆動電流を可変制御する。
(もっと読む)
遊技機
【課題】回胴回転時の安定性を向上させた遊技機を提供する。
【解決手段】定期的に行われる遊技機の処理手段の1つとして、回胴駆動モータ制御処理手段を有し、この回胴駆動モータ制御処理手段では、回胴駆動モータを駆動する信号が生成されると共に、生成されたこの駆動信号が一定の時間間隔で回胴駆動モータ側に出力される。具体的には、定期的な処理期間内での処理が複数存在するときには、全ての処理が終了するまでのトータル処理時間が変動するが、このような場合でも、例えばタイマ割り込み処理内での回胴駆動モータに対する駆動信号の出力タイミングBbをほぼ一定にすることで、出力間隔Tzが一定になる。これによってトータル処理時間の変動による駆動モータへの影響が回避され、回胴回転時の回転の安定性が図られる。これで、遊技者をゲームに集中させることができるようになるので、遊技者の興趣を逸らすことがない。
(もっと読む)
エンコーダ信号フィルタ装置
【課題】モータの速度変化時にも安定的にエンコーダ信号からノイズの影響を排除する。
【解決手段】ステッピングモータ104の軸角度を検出するエンコーダ105と、その検出信号をフィードバックしつつ、ステッピングモータに速度指令を与えて動作制御を行う制御手段91とを備えるエンコーダ信号フィルタ装置90において、制御手段によるステッピングモータの速度指令に基づいて遮断周波数を調整する速度検出部20と、遮断周波数に基づいて、エンコーダからの検出信号に含まれるノイズを除去するフィルタ処理部40とを備えている。
(もっと読む)
ステッピングモータの駆動方法、駆動システムおよび電流パターン更新装置
【課題】短時間で回転角度が目標角度に到達し、かつ、到達後の振動を抑制可能なステッピングモータの駆動方法、駆動システムおよび電流パターン更新装置を提供する。
【解決手段】ステッピングモータのコイルに流れる電流の相が切り替わるのに要する遷移期間を用い、取り付けられた負荷部の動特性を考慮した前記ステッピングモータの動作を表現する数理モデルに基づいて、前記ステッピングモータのシャフトの回転角度の時間変化を算出する。コイル13A,13Bに流れる電流の遷移期間Tdと遷移波形、および、負荷部30の動特性も考慮しているため、シャフトの回転角度θMを高精度にシミュレーションできる。結果として、電流IA,IBのパターンを最適化でき、短時間でシャフトの回転角度θM(t)が目標角度θtgに到達し、かつ、到達後の振動を抑制できる。
(もっと読む)
駆動装置
【課題】検出器や制御部において発生する遅れを反映させたすべり補正を行うことができる駆動装置を提供する。
【解決手段】制御部18は、被駆動体12が検出器16を通過する通過時点t0における被駆動体12の位置θDと、通過時点t0から検出器16が検出信号を出力する出力時点までの検出遅れ期間Δtdにおける被駆動体12の移動距離である第一距離Δθdと出力時点から制御部18が検出信号を取得する取得時点t1までの取得遅れ期間Δtrにおける被駆動体の移動距離である第二距離Δθrとの少なくとも一方の距離と、を用いて取得時点t1における被駆動体12の実際の位置を求める。さらに、被駆動体12の駆動開始時点から取得時点t1までにモータ14に出力した駆動信号によって定まる取得時点t1における被駆動体12の理論上の位置を求め、実際の位置と理論上の位置との差に基づいて取得時点t1以降の駆動信号を定める。
(もっと読む)
駆動系の寿命予測システム
【課題】ダウンタイムを発生させずに、ステッピングモータを用いた駆動系の負荷変動を観測して寿命予測を行うことが可能な駆動系の寿命予測システムを提供する。
【解決手段】ステッピングモータに印加された駆動電流の値、およびステッピングモータが、脱調状態に移行することが予測される脱調前状態にある可能性の大小に基づいて、ステッピングモータへ印加する駆動電流を設定し、その駆動電流の設定値に基づいて求められる駆動対象の負荷状態に基づいて、駆動対象の寿命を予測することを特徴とする。
(もっと読む)
ステップモータ駆動装置及びステップモータ駆動方法
【課題】ロータの回転状態を検出し、ステップモータを適切に駆動する。
【解決手段】制御回路52は、駆動回路32を制御して、励磁コイル114に間欠的に櫛歯パルスから構成された駆動パルスを印加する。第1ピークホールド回路413は、駆動パルス印加期間にわたって、各櫛歯パルス印加後に励磁コイル114に流れる還流電流のピーク値をホールドする。第2ピークホールド回路414は、各櫛歯パルス印加後に励磁コイル114に流れる還流電流のピーク値をホールドする。コンパレータ415は、第1と第2のピークホールド回路413と414の出力を比較し、比較結果を出力する。制御回路52は、コンパレータ415の出力に基づいて、還流電流のピーク値に所定の凹部が発生していない場合には、ロータが正常に回転していないと判定し、励磁コイル114に補正パルスを印加して、ステップモータを適切に駆動する。
(もっと読む)
駆動回路、及び空気調和機の室内機用駆動回路
【課題】アクチュエータの駆動源に接続される配線を小径化し、当該配線と接続される制御基板上のコネクタの大型化防止を可能とする。
【解決手段】室内機1に備えられ、複数のフラップ毎に設けられたフラップ用モータM1〜M4を駆動する駆動回路であって、フラップ用モータM1〜M4を動作させるドライバ素子と、当該ドライバ素子のうち対応するドライバ素子と接続される1つのコモン接点、及び同一番号の接点が1つのフラップ用モータに接続されてなる切換接点を有する切換スイッチと、各切換スイッチの切換接点を同一番号の切換接点に切り換える切換信号を切換スイッチに出力する切換信号出力部、及びフラップ用モータM1〜M4を駆動する駆動信号をドライバ素子に出力する駆動信号出力部を有するマイコン101を備える。
(もっと読む)
指針式電子時計
【課題】 ステッピングモータの駆動命令を出力する側と、駆動命令を受けて実際に駆動パルスを出力する側とで個別の制御が行われる構成において、複数のステッピングモータを早送り駆動する場合に、早送り駆動を速やかに完了できるようにする。
【解決手段】
早送り駆動の速度を決定する際に、複数のステッピングモータの駆動信号(D1,D2)が重ならないよう後方の駆動信号(D2)の出力タイミングがずらされることで、ステッピングモータの最大速度を超えるような時間間隔(T1)で駆動命令(C2)が入力されて、この駆動命令(C2)が破棄されるような状況を条件に含めて、指定されたステップ数の早送り駆動をより短時間で遂行できる駆動命令の出力速度(X)を決定する。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
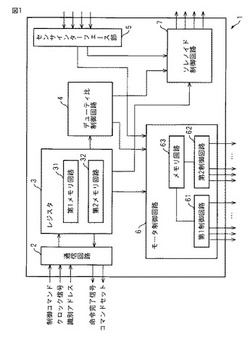
ステッピングモータ制御装置及び画像読取装置
【課題】クロック入力方式のモータドライバを用いたステッピングモータ制御装置及びそれを利用して画像の読取動作を行う画像読取装置において、モータドライバへの通電が遮断された後、再びモータドライバへの通電が再開した際に、モータドライバへの通電が遮断された際の停止位置からステッピングモータを再駆動できるようにすること。
【解決手段】モータドライバの電源がOFFされる際、ASICがモータドライバの電源OFF前の励磁相を記憶する。モータドライバへの通電が再開されたとき、モータドライバの励磁相が、モータドライバの電源OFF前の励磁相に更新されるまで、ASICである駆動制御部は前記駆動電流の供給を停止させる。そして、更新された後、駆動制御部がモータドライバの駆動回路がONされ、駆動回路がモータに駆動電流を供給し、モータの駆動が開始される。
(もっと読む)
回転制御装置、画像形成装置及びプログラム
【課題】加速回転中の回転式現像装置を予め定められた停止位置に停止させる回転制御装置、画像形成装置及びプログラムを提供する。
【解決手段】回転式現像装置を待機位置から現像位置まで回転させる場合、パルスカウント値及びプロファイルに格納されているパルス数に基づいて回転式現像装置を回転させるようにスッテピングモータを制御し、基準位置検知信号が入力されたときに、基準位置検知信号に対応する停止位置としてのホームポジションに回転式現像装置が停止するようにプロファイルのアドレス30に格納されているステップ数を調整するように制御する。
(もっと読む)
1 - 20 / 228
[ Back to top ]