
Fターム[5H680DD28]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 振動子 (4,401) | 振動子の構造 (3,460) | 分極の方向 (273) | 面方向 (73)
Fターム[5H680DD28]に分類される特許
41 - 60 / 73
超音波モータ

【課題】たとえばロータとステータとの接触に偏りが生じてしまった場合にも安定したトルクを維持することができるようにすることである。
【解決手段】ロータに接するステータの振動片を圧電素子によって振動させてロータを駆動する超音波モータにおいて、前記ステータの進行波を発生するための各相を、前記圧電素子の内周と外周とに配置したことを特徴とする。
(もっと読む)
超音波モータのステータ

【課題】超音波モータの効率向上とトルクを増大することができるステータを提供することである。
【解決手段】弾性体に固着した複数の圧電体により進行波を形成するステータと、ロータとを備え、前記ステータの進行波形成面に前記ロータを加圧接触させて回転するように構成した超音波モータのステータにおいて、前記ステータの周方向に複数の櫛歯を備え、円周上の法線と所定の角度を有して設けた複数のスリットにより前記櫛歯を形成していることを特徴とする。
(もっと読む)
回転型超音波モータ
【課題】トルクを低下させることなくモータ出力軸を高速で回転させることのできる回転型超音波モータを提供する。
【解決手段】モータケース21と、モータケース21に対して回転可能に設けられたモータ出力軸22と、モータケース21に固定された第1のステータ23と、第1のステータ23と協働して第1の超音波モータ部27を構成する第1のロータ24と、モータ出力軸22に固定された第2のステータ25と、第2のステータ25と協働して第2の超音波モータ部28を構成する第2のロータ26とを備えて構成されている。
(もっと読む)
インチワーム駆動によるアクチュエータ
【課題】組み立てや配線が簡単で、移動速度が早く、振動を低減することができ、小型化を図ることができるインチワーム駆動によるアクチュエータを提供する。
【解決手段】インチワーム駆動によるアクチュエータであって、
シャフト1と、該シャフトに篏合された薄肉パイプ2と、該薄肉パイプの外側に形成された圧電材3と、該圧電材の外側に形成された電極6、7、8と、を有し、
前記電極への印加電圧を制御し、前記シャフトの軸方向に薄肉パイプを収縮させることによって前記圧電材の変位を拡大させ、該薄肉パイプを該シャフトの軸方向に移動させるように構成する。
(もっと読む)
圧電振動子、その製造方法及び圧電振動子を有する線形アクチュエータ
【課題】小型で製造が容易で、かつ大量生産が可能な圧電振動子を提供する。
【解決手段】圧電素子の積層方向に対して上下及び左右に分離した複数個の震動部を有する圧電体と、各々の圧電素子間の圧電素子面に形成され、圧電素子面を左右方向に複数個に分割し、その一端が圧電素子の外側まで延長される複数個の電極端子及び電極端子が形成された圧電素子と隣り合う圧電素子の面に形成された複数個の電極端子と対応するように形成された複数個のジャンプ端子を有する内部電極パターンと、圧電体の側面に形成され、複数個の震動部のうち相互対角線方向に位置した震動部に同時に電源を印加するよう、各々の震動部及びその対角線方向に位置した震動部に対応する各々の電極端子とこれに対応するジャンプ端子を連結する複数個の側面電極を有する外部電極パターンと、圧電体の一側に形成されて震動部で発生した震動を外部に伝達する動力伝達部材とを含む圧電振動子が提供される。
(もっと読む)
圧電アクチュエータの駆動制御装置、電子機器および圧電アクチュエータの駆動制御方法
【課題】 貫通電流を防止でき、消費電流を低減でき、制御回路の構成を簡略化できる圧電アクチュエータの駆動制御装置を提供すること。
【解決手段】 駆動制御装置50は、圧電素子22の端子22A,22Bおよび電源、グランド間に接続された第1〜第4スイッチング素子Q1〜Q4と、スイッチング素子Q2,Q4に並列に接続されたダイオードD2,D4と、制御回路56を備える。制御回路56は、スイッチング素子Q1,Q4がオンで他がオフの状態から、まずスイッチング素子Q1をオフした後、スイッチング素子Q4をオフし、かつスイッチング素子Q2をオンし、その後、スイッチング素子Q3をオンする。スイッチング素子Q2,Q3がオンで他がオフの場合、スイッチング素子Q3をオフした後、スイッチング素子Q2をオフし、かつスイッチング素子Q4をオンし、その後、スイッチング素子Q1をオンする。
(もっと読む)
圧電振動体、圧電振動体の製造方法、圧電アクチュエータ、および電子機器
【課題】圧電素子と補強板とを強固に接着して信頼性を大きく向上させることができる圧電振動体の提供。
【解決手段】圧電アクチュエータの圧電振動体30において、圧電素子31,32および補強板33の積層方向と交差する方向に窪む凹部3311を補強板33の側面に形成した。このため、圧電素子31,32と補強板33とを積層して接着する際に、圧電素子31,32と補強板33との間から流出しようとする接着剤ADが凹部3311に案内され、接着剤ADを凹部3311内に留めて、圧電素子31,32および補強板33の間からの接着剤ADの流出を抑制することができる。したがって、圧電素子31,32と補強板33との間の接着剤ADが不足することなく、圧電素子31,32と補強板33とを強固に接着でき、秒クロノグラフ針を連続的に駆動するための高パワーの投入にも耐え得る信頼性を実現できる。
(もっと読む)
圧電薄膜振動子およびその製造方法、並びにそれを用いた駆動装置および圧電モータ
【課題】本発明は、薄膜形成技術を用いて形成された圧電素子を備えた圧電薄膜振動子およびその製造方法、並びにそれを用いた駆動装置および圧電モータに関し、反りのない圧電薄膜振動子およびその製造方法、並びにそれを用いた駆動装置および圧電モータを提供することを目的とする。
【解決手段】進行波を発生させるレゾネータ4と、レゾネータ4の表面に形成された下部電極(第1電極層)3と、下部電極3上に形成された圧電薄膜(第1圧電薄膜)2と、圧電薄膜2上に形成された複数の上部電極(複数に区画された第2電極層)1a〜1dおよび11a〜11dとで構成された積層構造を備えた圧電素子部9と、レゾネータ4の裏面に形成され、圧電素子部9の積層構造のいずれか1層と同一の積層構造を備え、圧電素子部9に生じる内部応力を補償する応力補償膜8とを有するように構成する。
(もっと読む)
超音波モータの駆動装置及びその方法並びに超音波システム
【課題】 超音波モータの速度制御を精度良く行うことのできる超音波モータの駆動装置及びその方法並びに超音波モータシステムを提供することを目的とする。
【解決手段】 超音波モータ1が備える複数の超音波振動子10a、10b、10cの各々に対して、所定の駆動周波数の2相の交番電圧を個別に供給することにより、超音波モータ1を駆動する超音波モータの駆動装置において、各超音波振動子10a、10b、10cに供給する2相の交番電圧の位相差を個別に制御することにより、超音波モータの速度を制御する。
(もっと読む)
振動波モータ
【課題】 移動体の加圧機構とガイド機構とを備えると同時に薄型化を実現できるようにし、さらに復元力の影響を除去できるようにする。
【解決手段】 互いに固定された永久磁石1と圧電素子3とからなる弾性振動体4と、永久磁石1に設けられた複数の運動抽出部2A,2Bと、複数の運動抽出部2A,2Bに加圧接触される移動体5とを有し、複数の運動抽出部2A,2Bを介して弾性振動体4と移動体5とを結ぶ磁束の閉磁路を形成し、かつ移動体5中の磁束の流れ方向と移動体5の移動方向とを一致させるようにする。
(もっと読む)
変位拡大手段を有する圧電線形モータ
【課題】本発明は、圧電セラミックの変形による移動子の変位を最大限に拡大することで移動子をより大きな駆動力と速い速度で移動させることができる変位拡大手段を有する圧電線形モータを提供する。
【解決手段】シャフトが、膨張変形及び収縮変形が可能な圧電アクチュエータに軸方向に移動可能に連結される。圧電アクチュエータは、電圧が印加されると膨張変形または収縮変形する圧電セラミックを備える。移動子は、シャフトとの間で所定の摩擦力が生ずるとともに、シャフトに対して相対移動可能に、シャフトに設けられる。移動子の変位を拡大するために、モータは、圧電セラミックの一面に付着されるベース板と、ベース板から円錐形状に延設される傾斜板と、傾斜板の先端部の中心に形成されてシャフトが結合する上板と、をさらに備える。ベース板は、圧電セラミックの膨張変形または圧縮変形時に凸状または凹状の断面形状を有するように変形され、ベース板の変形によって、上板はシャフトの軸方向に移動する。
(もっと読む)
超音波モータ
【課題】 縦振動モードおよび屈曲振動モードの双方の振動モードをそれぞれ独立した形で、あるいは縦振動モードのみを特別な装置を用いることなく、容易に検出すること。
【解決手段】 駆動用の電気機械変換素子12(A+),12(A−),12(B+),12(B−)および振動検出用の電気機械変換素子12(C+),12(C−),12(D+),12(D−)を備え、前記駆動用の電気機械変換素子12(A+),12(A−),12(B+),12(B−)に所定の位相差および所定の駆動周波数の2相の交番電圧を供給することにより、異なる2つの振動モードを同時に発生させて出力端に略楕円振動を生じさせる超音波振動子を備える超音波モータであって、前記振動検出用の電気機械変換素子12(C+),12(C−),12(D+),12(D−)により縦振動モードおよび屈曲振動モードの双方の振動モードをそれぞれ独立した形で検出可能とされている。
(もっと読む)
圧電アクチュエータモジュール、モータモジュールおよび装置
取り扱いが容易で薄型化が図れ、汎用性の高い圧電アクチュエータモジュールを提供する。 圧電アクチュエータモジュール10は、電極を有する圧電アクチュエータ本体21と、外部から駆動信号が入力され、前記電極に前記駆動信号を供給する信号入力端子18A〜18Dと、圧電アクチュエータ本体21と略同一平面上に配置され、圧電アクチュエータ本体21により駆動され回転運動する回転体22と、回転体22および前記信号入力端子が電気的に接続された前記圧電アクチュエータ本体を収納する筐体15と、筐体15より露出され、回転体22により直接的あるいは間接的に伝達された回転運動を外部に出力するための出力軸12と、を備える。 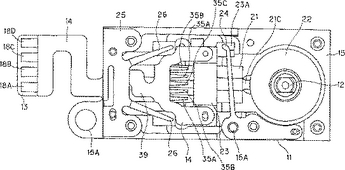 (もっと読む)
(もっと読む)
超音波モータおよび超音波モータシステム
【課題】 加圧機構を簡略化して小型化するとともに、超音波振動子に対して被駆動体を高精度に相対移動させる。
【解決手段】 駆動電圧を供給されることにより、異なる2つの振動モードを同時に発生させて出力端に略楕円振動を生じさせる超音波振動子2と、該超音波振動子2の出力端に固定された接触部材10と、該接触部材10により押圧される磁性材料からなる被駆動体3と、接触部材10に設けられ、被駆動体3を接触部材10側に磁気吸引して両者を密着させる磁界Mを発生する磁界発生手段と、被駆動体3に固定され、磁界発生手段により発生された磁界Mの強さを検出する磁気センサ4とを備える超音波モータ1を提供する。
(もっと読む)
超音波浮上装置
【課題】許容負荷荷重を大きくすることが可能な超音波浮上装置を提供する。
【解決手段】固定部1と、上記固定部1に対して移動可能に設置された可動部9と、上記固定部1又は可動部9に設けられ超音波振動を発生する振動発生装置13と、を具備し、上記振動発生装置13が超音波振動することにより上記可動部9が浮上面を介して浮上するように構成された超音波浮上装置において、上記振動発生装置13によって発生される超音波振動が主振動に対して副次振動を伴うものであることを特徴とする。
(もっと読む)
超音波モータ及びそれを用いた電子機器
【課題】 振動体の振動により、移動体を摩擦駆動する超音波モータ及びそれを用いた電子機器に関し、特に超音波モータの回転出力を出力取り出し部材を介して伝達部材に伝える機構により駆動される電子機器に関する。
【解決手段】 本発明の超音波モータは上記課題を解決する為に、圧電素子を有する振動体と、振動体の振動により摩擦駆動される移動体と、移動体に設けられた出力取り出し部材と、を有するとともに、移動体は振動体との接触方向に厚みが増大した凸部を有し、出力取り出し部材は移動体の凸部に設けた構造とした。また、移動体には振動体との接触部と出力取り出し部材との間に厚みが薄い溝部を有する構造とした。
そして、超音波モータを駆動源とする電子機器において、超音波モータの出力取り出し部材の動作に伴い動作する伝達部材と、伝達部材により駆動される稼動部材を有する構成とした。
(もっと読む)
超音波アクチュエータ駆動装置及び超音波アクチュエータ駆動方法
【課題】 駆動信号として矩形波の信号を用いて製造コストを抑えつつ、超音波アクチュエータの振動子の共振周波数を正確に検出して駆動する事が可能で、その結果効率が良く、電源を電池として用いた場合の電池の持続時間が長い超音波アクチュエータ駆動装置及び超音波アクチュエータの駆動方法を提供する事を目的とする。
【解決手段】 超音波アクチュエータ2の超音波振動子2Aを駆動する駆動信号を生成する駆動信号発生部3と、超音波振動子2Aに印加される電圧と電流との位相差を検出する検出部4と、検出部4の検出結果に基づき駆動信号発生部3の生成する駆動信号の周波数を制御する制御部5とを設ける。検出部4を、超音波振動子2Aに印加される電流の基本周波数成分を検出しこの基本周波数成分に基づいて振動子に印加される電圧と電流との位相差を検出する構成とする。
(もっと読む)
電気機械駆動素子
電気機械駆動素子の製造において、振動特性が試験環境で定義される。これらの特性は、モータに構成されるときに優れた動作をもたらすことが認められる。2つの撓み振動モードが定義される。1つは、それぞれの外側部分の2つの支持体に固定される素子に関係するsモードである。sモードは3つの節点を有する。もう1つの振動モードは、支持体および中間部分(H1)に配置された駆動パッドに固定される素子に関係するεモード(112)である。εモード(112)は、中間部分(111)の両側に1つずつ節点(155)を有し、中間部分(111)は、中間部分(111)と節点(155)との間の部分(113、115)のストローク振幅より小さいストローク振幅を有する。2点および3点でそれぞれ固定されたsモードの共振周波数の平均は、εモード(112)の共振周波数とは25%未満だけ異なる。 (もっと読む)
アクチュエータおよびこれを用いた撮像系
【課題】本発明はアクチュエータおよびこれを用いた撮像系に関し、小型化を目的とする。
【解決手段】レンズ1の位置を制御することにより撮像条件を調節する撮像系に用いられるアクチュエータ3を、柱状に形成されたアーム5と、このアーム5の一主面に並設された駆動電極9とを備え、駆動電極9は圧電薄膜8を電極で挟み込んだ構成とし、並設された駆動電極9に印加する制御電圧を制御することにより前記アーム5をその延伸軸10の方向に対して周回運動させる構造とした。
(もっと読む)
超音波モータ
【課題】モータの形状を大きくすることなく、棒状超音波モータの構造に直接、位置検出器(エンコーダ)および、スケールを組み込む。
【解決手段】棒状振動子を固定する支持部材に、移動体(ロータ)の移動量を検出するための移動量検出手段を備え、また回転出力部材にスケールを一体的に備えさせる。
(もっと読む)
41 - 60 / 73
[ Back to top ]