
Fターム[5H680DD28]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 振動子 (4,401) | 振動子の構造 (3,460) | 分極の方向 (273) | 面方向 (73)
Fターム[5H680DD28]に分類される特許
61 - 73 / 73
超音波モータ

【課題】モータの形状を大きくすることなく、棒状超音波モータの構造に直接、位置検出器(エンコーダ)および、スケールを組み込む。
【解決手段】棒状振動子を固定する支持部材に、移動体(ロータ)の移動量を検出するための移動量検出手段を備え、また回転出力部材にスケールを一体的に備えさせる。
(もっと読む)
レンズ駆動装置及び、撮像装置

【課題】絶縁性の優れたレンズ駆動装置及び、これを用いた撮像装置を提供することを目的とする。
【解決手段】
鏡筒16と、鏡筒16内に光軸に形成されたガイド15と、レンズ14を保持し鏡筒16内をガイド14に沿って光軸方向に移動するレンズブロック13と、鏡筒16の内壁に一端をレンズブロック13に他端を固定された上部アクチュエータ11とを備えるレンズ駆動装置で、上部アクチュエータ11は径方向に鏡筒16及びレンズブロック13に固定されており、電圧に応じて光軸方向の成分を有するよう伸縮し、上部アクチュエータ11は下部アクチュエータ12によってテンションを付与されている。
(もっと読む)
アクチュエータ
【課題】 小型化が容易なアクチュエータを提供する。
【解決手段】筒状の第1の移動体11の内壁11aに、第2の移動体12及び圧電素子13の端面13aが接しており、圧電素子の端面13bが固定部材に固定されている。第2の移動体12には第1の移動体11の内壁11aからの摩擦力が作用しており、第1の移動体11の内壁11aには圧電素子13の端面13aからの摩擦力が作用している。圧電素子13は、圧電性セラミックス13cの左右面に電極13d,13dが設けられたものである。圧電性セラミックス13cは矢印方向に分極している。
(もっと読む)
振動発生装置、触覚機能付きの入出力装置及びその電子機器
【課題】 高級一眼レフカメラ等の力量感溢れるシャッター操作をデジタルカメラ等で再現できるようにする。
【解決手段】 第1の振動を発生する圧電アクチュエータ25と、第1の振動と異なった第2の振動を発生する振動モータ45と、圧電アクチュエータ25及び振動モータ45の入出力を制御するアクチュエータ駆動回路37とを備え、アクチュエータ駆動回路37は、予め設定された動作条件に基づいて圧電アクチュエータ25又は及び振動モータ45を選択し、当該動作条件に基づいて圧電アクチュエータ25又は振動モータ45を駆動するものである。この構成によって、素早い応答性が要求される触覚は、圧電アクチュエータ25の振動で対処することができ、強い触覚が要求される場合は、振動モータ45の振動で対処できるようになる。
(もっと読む)
超音波振動子
【課題】特別な電極配線の構成により小型化を可能にした超音波振動子を提供する。
【解決手段】超音波振動子20は前面のA相外部配線用絶縁体21と後面のB相外部配線用絶縁体24の間に圧電体22と圧電体23が交互に積層される。圧電体22の内部電極は2枚のA+内部電極25と2枚のB+内部電極26が中央部14を中心に襷掛けに配置され、圧電体23の内部電極は2枚のA−内部電極27と2枚のB−内部電極28が同様に襷掛けに配置される。中央左右の2個の内部電極付きスルーホール電極29−1と2個の独立スルーホール電極29−2を介して同一パターンの内部電極が一括して外部電極31a〜31h及び32a〜32hに接続される。A+内部電極25群は外部電極31a、31f、導体膜33により一括接続され、A−内部電極27群は外部電極31b、31e、導体膜34により一括接続される。B+及びB−内部電極群は同様に外部電極32c、32d、32g、32h、導体膜35及び36によりそれぞれ一括接続される。
(もっと読む)
圧電アクチュエータ
【課題】誤動作を防止することができ、安定的に駆動することができる圧電アクチュエータを提供すること。
【解決手段】補強板21および補強板21に積層された圧電素子22を有し、圧電素子22に交流電圧を印加することにより駆動されて振動する振動体2と、補強板21に設けられ、振動体2の振動により被駆動体Rに接触して被駆動体Rに駆動力を伝達する接触部3と、圧電素子22に前記交流電圧を印加する駆動電極12、13と、振動体2の振動時にて圧電素子22に誘起される電圧を検出する検出電極11、14とを有する圧電アクチュエータ1であって、検出電極11がアースに接続されていることを特徴とする。
(もっと読む)
圧電アクチュエータ
【課題】配線時や駆動時における、配線のはがれ、接触不良および電極の溶解を防止でき、かつ、安定的に駆動することができる圧電アクチュエータを提供すること。
【解決手段】補強板21および圧電素子22を有し、圧電素子22に交流電圧を印加することにより駆動されて振動する振動体2と、補強板21に設けられ、振動体2の振動により被駆動体Rに接触して被駆動体Rに駆動力を伝達する接触部3と、圧電素子22の表面に設けられ、圧電素子22に交流電圧を印加する駆動電極12、13と、圧電素子22の表面に設けられ、振動体2の振動時にて圧電素子22に誘起される電圧を検出する検出電極11、14とを備えた圧電アクチュエータ1であって、駆動電極12、13および検出電極11、14は、それぞれ、その一部に、残部より厚みの厚い導通部51〜54、61、62を有することを特徴とする。
(もっと読む)
高分解能圧電モータ
ロードを動かして位置決めする為の圧電モータであり、複数の電極と、ロードに押し当てられる連結面とを有した圧電振動子と、少なくとも一の振動子の電極に時間的に変化する電圧を印加して所望位置にロードを進めるように連結面を振動させる、或いは、少なくとも一の振動子の電極に直流電圧を印加して連結面を変位させることにより所望位置にロードを動かすよう選択的に作動する電源装置であって、所望位置でロードを保持するよう直流電圧を維持する電源装置とを備えている。  (もっと読む)
(もっと読む)
積層電気−機械エネルギー変換素子及び振動波駆動装置
【課題】 小型化且つ高出力化できると共にモ−タ効率を向上させることができる積層電気−機械エネルギー変換素子及び振動波駆動装置を提供する。
【解決手段】 振動波モータ50は、振動子52及び回転部53を備え、振動子52は、金属の弾性体54と、円形状圧電層1〜11から成る積層圧電素子55と、金属の弾性体57と、弾性体54と協働して積層圧電素子55及び弾性体57を挟持する金属の弾性体58とから成る。圧電層2〜11のうち偶数番目の層の圧電層の第1層側の面には、内部電極A+,B+,A−,B−が設けられ、一方、圧電層2〜11のうち奇数番目の層の圧電層の第1層側の面には、内部電AG+,BG+,AG−,BG−が設けられている。これらの内部電極は、積層圧電素子55の内部の発生すべき歪に応じて、圧電層7〜11までの内部電極に比べて、圧電層5,6の内部電極の外径は小さく、圧電層2〜4の内部電極は外径がさらに小さくなっている。
(もっと読む)
圧電アクチュエータおよび駆動装置
【課題】 ぶれ方向の共振周波数を高くすることを可能とした圧電アクチュエータおよび駆動装置を提供すること。
【解決手段】 本発明の圧電アクチュエータは、矩形の伸縮変位部および前記伸縮変位部の伸縮変位方向に連結された矩形の剪断変位部を備える圧電アクチュエータであって、伸縮変位方向の長さをH、剪断変位方向の長さをL、前記伸縮変位方向と前記剪断変位方向とに垂直な方向の長さをW、密度をρ、そしてヤング率をYとしたとき、前記H、L、W、ρ、そしてYが、H≦10mm、L/W≦2.5、ρ≦8×10−3kg/m3、かつ65GPa≦Y、なる関係式を満たす。
(もっと読む)
圧電超音波モーター
【課題】圧電超音波モーターの励起電圧の低下、機械的出力および信頼性の増加、モーター設計の単純化、製造コストの低減、およびモーターの構造的な取り扱いの改善を達成すること。
【解決手段】本発明は、長さLおよび高さHの圧電プレートの形の振動子、ならびに振動子に配置され、動かすべき部分の摩擦表面に対して弾性的に押し圧された1個または2個の摩擦要素を備える圧電超音波モーターに関する。本発明によれば、圧電プレートはより大きな表面に縦に展延する区画面によって2個の同一部分に分割され、これらの部分の少なくとも1個は非対称音響定在波の非対称的な発生器を含み、その起動によって非対称的な2次元定在波を発生するので、圧電プレートの長い端部面の中心に配置された摩擦要素は分割面に対して同一の傾きで運動を行い、動かすべき要素に運動エネルギーが伝達される。
(もっと読む)
多方向圧電モータ配置
複数の圧電モータ(31、32)の各々の連結部(48)をボディの表面に押圧することによって複数の圧電モータをボディに連結することと、ボディを動かすために表面に平行な(53)力を加えるようにモータの少なくとも一つを制御することと、その連結部が実質的に表面に垂直な(51)振動のみを行うように少なくとも1つのモータを同時に制御することと、からなる、ボディ(23)を動かす方法。 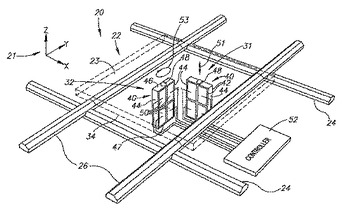 (もっと読む)
(もっと読む)
電気機械モータ及びその組立方法
電気機械モータ(10)において、細長い電気機械駆動要素(30)が、キャリア(150)に、機械的に、且つ、好ましくは電気的に取り付けられる。ばね(54)が、キャリア(150)の裏側を枢動点(152)にて押すことにより電気機械駆動要素(30)に力を加えるように配置されている。キャリア(150)は、前記要素の長手方向に平行な軸を中心に枢動点(152)の周りを枢動することが可能にされている。これにより、電気機械駆動要素(30)は浮動するように浮かせられる。電気機械駆動要素(30)は、前記長手方向に対して垂直なストロークを有する曲げ運動をもたらすように配置されている。枢動点(152)、キャリア(150)と電気機械駆動要素(30)との間の機械的ジョイント(151)、及び、好ましくは、電気機械要素(30)の曲げ運動の節点(155)が、前記要素の長手方向に対して垂直の共通の面に配置される。一実施形態において、電気機械駆動要素には金属被覆領域(32)が設けられ、この領域(32)にキャリア(150)がはんだ付けされる。これらの金属被覆領域(32)は、電気機械駆動要素(30)の長手方向側部に設けられる。金属被覆領域は、好ましくは表面実装技術を用いて、フレキシブルプリント基板の取付けパッドにはんだ付けされ、又は他の方法、例えば接着により固定される。  (もっと読む)
(もっと読む)
61 - 73 / 73
[ Back to top ]