
Fターム[5H680FF26]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | 周波数制御 (333) | 共振周波数 (159)
Fターム[5H680FF26]に分類される特許
1 - 20 / 159
駆動装置、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット
振動型駆動装置とその移動体の製造方法
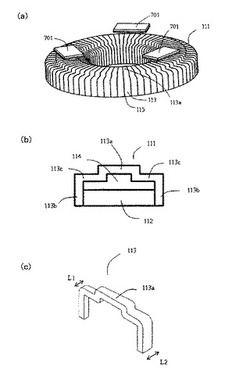
【課題】低コスト化、高精度化を図ることが可能となる振動型駆動装置とその移動体の製造方法を提供する。
【解決手段】電気−機械エネルギー変換素子への交流電圧の印加により振動子に楕円運動を励振させ、振動子と接触する移動体を相対移動させる振動型駆動装置であって、
移動体は、本環部と複数の板ばね部とを備え、
複数の各板ばね部は、該板ばね部と本環部を接合する固定部と、振動子と接触する接触部と、接触部と固定部を連結する連結部と、を有し、
接触部に振動子が接触して連結部が変形した際に、板ばね部に所定のバネ剛性を持たせるように、本環部と接触部との間に空間部を設けて複数の板ばね部が固定部を介して本環部と接合される。
(もっと読む)
超音波モータ

【課題】圧電素子の屈曲振動を積極的に使用することによりねじれ共振振動を効率よく発生させることのできる超音波モータを提供する。
【解決手段】中心軸に垂直な断面が矩形状の長さ比率を有する振動子と、振動子の楕円振動発生面に接して振動子の楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータと、を少なくとも備えた超音波モータであって、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、回転軸に対してそれぞれ鋭角をなす、2つの分極方向にそれぞれ沿った2つの分極軸を備える。
(もっと読む)
超音波振動子、及び超音波モータ
【課題】簡略な構成の超音波振動子及び超音波モータを提供すること。
【解決手段】略直方体形状を呈する当該超音波振動子40の中心軸に垂直な断面を構成する短辺と長辺との長さの比率が、前記中心軸方向に伸縮する縦振動と、前記中心軸を捻れ軸とする捻れ振動と、の共振周波数を略一致させる比率に設定されており、前記縦振動と前記捻れ振動とが同時に励起されることで楕円振動が励起される超音波振動子40を次のように構成する。すなわち、当該超音波振動子40に励起される前記縦振動の節部且つ前記捻れ振動の腹部に対応する位置に配置された積層圧電素子40p振動子40と、前記積層圧電素子40pを前記中心軸方向における一方側と他方側とから挟み込む一対の弾性体である第1の弾性体40e1及び第2の弾性体40e2と、を超音波振動子40に具備させる。
(もっと読む)
圧電アクチュエーター、ロボット及びロボットハンド
【課題】駆動電圧を印加する電極を切り換えずに正転と逆転の切り換えが可能な圧電モーターを実現する。
【解決手段】圧電体層120と圧電体層120に駆動電圧を印加可能な電極121とを含む圧電素子22と、圧電素子22と積層される短辺と長辺とを有する長方形の板材であり、かつ長辺方向の一方の端部から平面方向に突出する突出部23を有する振動板21と、突出部23に当接されるローター100と、を少なくとも備える圧電アクチュエーター1であって、突出部23は振動板21の略中心を通り長辺方向に延在する第1の中心線71からオフセットされた位置に配置されており、振動板21は、突出部23が配置された位置の略対角位置にカウンターウェイト25を備えていることを特徴とする圧電アクチュエーター1。
(もっと読む)
振動波駆動装置
【課題】回転体との接触部を複数有する振動子を備えた振動波駆動装置において、任意の軸周りに回転体を回転可能とした振動波駆動装置を提供する。
【解決手段】回転体との接触部を複数有する振動子を備え、振動子は、第1の定在波を前記振動子に発生させる、第1の駆動信号が供給される第1の電極群と、合成されて振動子に第2の定在波を発生させる、少なくとも2つの定在波を発生させる第2の駆動信号及び第3の駆動信号が、それぞれ供給される、第2の電極群及び第3の電極群と、を有し、第2の定在波は、腹の空間的位置位相が、第2の駆動信号及び第3の駆動信号によって設定され、第1の定在波は面内振動定在波かつ第2の定在波は面外振動定在波、または第1の定在波は面外振動定在波かつ第2の定在波は面内振動定在波であり、複数の接触部は、第1の定在波の波長の1/2の整数倍の間隔で配置されている。
(もっと読む)
圧電アクチュエータ及び圧電アクチュエータアレイ
【課題】高さ方向の長さが大きくならず、駆動回路の数を少なくすることが可能な圧電アクチュエータを提供する。
【解決手段】圧電アクチュエータ10は、底面が基部20に固定され、基部20から立設した柱状の圧電体31と、圧電体31に駆動電圧を印加するための駆動電源部と、を備える。圧電体31に電界を付与する一対の電極32、33を二組備える。二組の電極は、圧電体31の中心軸CLと平行な平面である仮想平面VPL1にて圧電体31を二分割することにより形成される一つの領域(仮想平面VPL1よりもX軸負側の領域)と他の一つの領域(仮想平面VPL1よりもX軸正側)とのそれぞれの領域に一組ずつ存在するように形成される。駆動電源部は、圧電体31の「2次屈曲共振周波数と1次伸縮共振周波数との間の周波数」を有する駆動電圧Vinを、二組の「一対の電極」のうちの何れか一方の組の一対の電極に選択的に印加するように構成される。
(もっと読む)
振動アクチュエータ、光学機器及び振動アクチュエータの制御方法
【課題】作動音の発生を抑えることのできる振動アクチュエータの制御方法と振動アクチュエータおよびそれを用いる光学機器を提供する。
【解決手段】カメラは、合焦レンズを移動駆動する超音波モータと、超音波モータに所定の電圧および周波数の駆動信号を供給して回転制御する制御装置とを備えている。制御装置は、ウォブリング動作制御の際に、超音波モータへの電力(駆動信号)の供給を継続し続けたまま、その周波数を駆動周波数範囲と不機能周波数以上との間で変化させることで、超音波モータ30の駆動(回転)をON/OFF制御する。
(もっと読む)
振動型駆動装置
【課題】 2つの異なる振動モードの励振を行う振動子において、振動モードの共振周波数差が出力性能に影響を及ぼすが簡易に共振周波数差を調整することは難しい。
【解決手段】 本発明の振動子は、共振周波数調整用の電気−機械エネルギー変換素子による調整領域を備えており、調整領域にインピーダンス素子が接続されている。
(もっと読む)
ピエゾアクチュエータ駆動装置
【課題】共振周波数から外れた周期でアクチュエータが駆動される期間をより短くすることが可能なピエゾアクチュエータの駆動技術を提供すること。
【解決手段】ピエゾアクチュエータ駆動装置1は、ピエゾアクチュエータ2を動作させるための第1信号を出力する駆動信号出力部10,13と、第1信号よりも相対的に振幅の小さい第2信号を、第1信号の前段又は後段の少なくとも一方に付加する信号付加部11,12と、第2信号の周波数とピエゾアクチュエータの共振周波数との差異に応じたレベルの第3信号を駆動信号出力部へフィードバックする共振周波数検出部14と、を備える。駆動信号出力部は、第3信号のレベルに対応して第1信号の周波数の設定値を増減させる。
(もっと読む)
駆動装置
【課題】移動体が正常に動作可能な移動ストロークを広げる。
【解決手段】駆動装置1は、振動することによって駆動力を出力するアクチュエータ本体4と、アクチュエータ本体4が当接しており、アクチュエータ本体4に対して所定の移動方向に相対的に移動可能な移動体11と、移動体11を挟んでアクチュエータ本体4と対向する位置に配置され、4アクチュエータ本体と共に移動体11を挟持するローラ6とを備えている。移動体11のうち、ローラ6と当接する部分は、ローラ6よりも弾性係数が小さい。
(もっと読む)
振動型アクチュエータの制御装置及び振動型アクチュエータの制御方法
【課題】複数の振動子のそれぞれの振動子の共振周波数にズレがあっても、安定して駆動することが可能となる振動型アクチュエータを提供する。
【解決手段】複数の振動子に共通の交流信号を印加することにより複数の振動子の接触部に楕円運動を生じさせ、楕円運動により接触部に接触する被駆動体を複数の振動子に対して相対移動させる振動型アクチュエータの制御装置であって、
交流信号の駆動周波数を設定する周波数決定手段を備え、
周波数決定手段は、振動子毎に設定された楕円比変更周波数範囲が重複する周波数範囲内で、楕円運動の楕円比を変化させる際の交流信号の周波数を設定し、
楕円比変更周波数範囲は、
楕円比を変化させた時の最大の共振周波数を下限値とし、下限値よりも高い周波数であり被駆動体が相対移動する最大の周波数を上限値とし、上限値と下限値の間の周波数範囲として振動子毎に設定されている。
(もっと読む)
超音波モータの駆動装置
【課題】駆動波形生成部が生成する駆動波形の周期を詳細に調整することが可能な超音波モータの駆動装置を提供する。
【解決手段】この超音波モータ1の駆動装置2は、圧電素子11a、11b、11cおよび11dを含む超音波モータ1の圧電素子11a〜11dを駆動する信号を生成する矩形波形生成器22、LPF23a、23b、および、増幅器24a、24bを備え、矩形波形生成器22は、周期の異なる複数の矩形波形221および矩形波形222を含む矩形波形を生成可能に構成されている。
(もっと読む)
アクチュエータの駆動装置ならびにそれを用いる平行移動機構、干渉計および分光器
【課題】被駆動部材となる可動部とそれを駆動する駆動部とを備えて成るアクチュエータをPLL回路で駆動し、機械共振駆動を行わせる駆動装置において、短時間でかつ確実な位相引き込み動作を可能にし、さらに回路規模の増大やコストアップを抑える。
【解決手段】PLL回路のループフィルタ部14aを、位相比較器13の位相比較信号Vpdを平滑化してVCO11へ制御電圧Vcとして与えるLPFとしての機能を実現する積分回路21に、基準電圧源22とリセット手段としての短絡スイッチ23とを設ける。したがって、前記制御電圧Vcは、積分動作に伴い、基準電圧Vrefから共振周波数の目標電圧付近に滑らかに移行するので、オーバーシュートやリンギングの発生がなく、短時間でかつ確実な位相引き込み動作(位相ロックイン)を行うことができる。また、PLLループの外部に、制御信号を掃引するための特別な構成を設ける必要もない。
(もっと読む)
超音波モータおよびその駆動方法
【課題】高推力が得られ、かつ駆動時の被駆動体との摩擦を低減し、パーティクルの発生を抑制できる超音波モータを提供する。
【解決手段】多重振動モードの振動に用いられる矩形の超音波モータ10であって、圧電層11bと、圧電層11bの一方の主面側に設けられた2区分の駆動電極14a、14bと、圧電層11bの他方の主面側に設けられたグランド電極とを備え、2区分の駆動電極の一方に電圧を印加し、他方を開放する単相駆動の駆動回路18により、多重振動モードの反共振周波数以上の周波数で駆動される。矩形の超音波モータ10を単相駆動により、多重振動モードの反共振周波数以上の周波数で駆動させることにより、高推力が得られ、かつ駆動時の被駆動体との摩擦を低減し、パーティクルの発生を抑制できる。
(もっと読む)
圧電アクチュエーターの制御装置、圧電アクチュエーター装置及び印刷装置
【課題】 圧電アクチュエーターの高出力での駆動を安定して行うことができる圧電アク
チュエーターの制御装置を提供する。
【解決手段】 検出用電極95,96を介して変位検出部330が検出したアクチュエー
ター部10の駆動に伴う変位及び記憶部340が記憶している変位に基づき位相調整回路
312を介して縦振動用の第1の駆動信号に対する屈曲振動用の駆動信号の一つである第
2の駆動信号の位相を位相調整回路312を介して制御する駆動位相制御部320を有し
、この駆動位相制御部320は、前記第1の駆動信号に対する第2の駆動信号の位相差を
表す所定の初期位相を中心として第1の駆動信号に対する第2の駆動信号の位相を所定の
振り幅で変化させ、これに伴い検出信号が最小となる位相に前記振り幅の中心位相をシフ
トさせるとともにかかる操作を繰り返し前記中心位相が前記変位の最小値に追従してシフ
トされるように記第2の駆動信号の位相を制御するように構成した。
(もっと読む)
超音波モータ
【課題】全体構成を簡略化することができ、かつ、配線の数を減らすことのできる超音波モータを提供する。
【解決手段】中心軸に垂直な断面が矩形状の長さ比率を有する振動子と、振動子の楕円振動発生面に接して振動子の楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータと、を少なくとも備えた超音波モータであって、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ共振振動と、を合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動検出電極層を備える。
(もっと読む)
超音波モータ
【課題】圧電素子の屈曲振動を積極的に使用することによりねじれ共振振動を効率よく発生させることのできる超音波モータを提供する。
【解決手段】振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、中心軸に垂直な面内において複数の領域を有し、複数の領域は、中心軸に沿った方向における変位が隣り合う領域で互いに異なり、振動子は、その分極方向に沿った方向に伸縮する。
(もっと読む)
超音波モータ用振動子摩擦接触部材および超音波モータ用振動子
【課題】振動子先端の摩擦接触部の形状により初期動作が持続して安定な速度、推力、安定な共振周波数が保たれ、安定した動作特性が長期にわたって得られる超音波モータ用振動子を提供する。
【解決手段】被駆動体2を摩擦接触で駆動する超音波モータ用振動子1の摩擦接触部材において、振動子先端の接触子を前記被駆動体との摩擦接触で摩耗する際に軸方向に沿って横断面の外形と横断面積が同一の状態を保つピン形部材で構成したことを特徴とする超音波モータ用振動子摩擦接触部材、およびその超音波モータ用振動子摩擦接触部材を備えた超音波モータ用振動子。
(もっと読む)
駆動装置、それを備えた撮像装置、及び撮像機器
【課題】駆動装置の低背化を実現する。
【解決手段】本発明の駆動装置は、一部が固定され、電気的制御により屈曲変位が励起される屈曲変位部材91Aと、屈曲変位部材91Aに連結されているとともに、鏡筒4’と接触し、屈曲変位部材91Aの屈曲変位方向と異なる方向に変位方向を変換して鏡筒4’を駆動する駆動方向変換部材99とを備え、駆動方向変換部材99に対し鏡筒4’を付勢する予圧バネ98と、屈曲変位部材91Aの屈曲変位を制御する制御手段とを備えているので、駆動装置の小型化・低背化を実現することができる。
(もっと読む)
1 - 20 / 159
[ Back to top ]