
Fターム[5J070AK30]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 死角対策 (47)
Fターム[5J070AK30]に分類される特許
41 - 47 / 47
少なくとも1つの側方および後方の周辺状況捕捉装置を有する自動車用の危険検知システム
本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置を有する、自動車用の危険検知システムに関する。本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置、周辺状況解釈装置および運転者反応支援装置を有する、自動車用の危険検知システムであって、周辺状況捕捉装置が、本危険検知システムを搭載した自動車に対して相対移動する移動対象物を捉えるシステムに関する。この危険検知システムは走行方向に逆向きに配置されている2つのセンサを有している。このシステムはデータの算出用として、センサ毎に少なくとも1つの評価および解釈ユニットを有している。 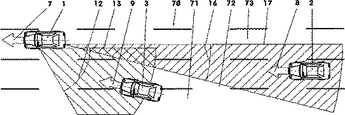 (もっと読む)
(もっと読む)
方位分解能を高めるビーム形状

【課題】高い方位分解能をもち、死角を検知しうるレーダーシステムを提供する。
【解決手段】車両用レーダーシステムが、ビーム形成回路とビーム合成回路とを備えるようにする。ビーム形成回路は、複数のビームポートに、複数のアンテナビームを与える。ビーム合成回路は、ビーム形成回路から複数のアンテナビームを受け取り、これらのアンテナビームを合成して、所望の数のアンテナビームを作り出す。ビーム合成回路がつくり出す所望の数のアンテナビームにおいては、両端の第1および第2のビームの各ビーム幅が、中間のビームのそれよりも狭い。
(もっと読む)
自動車の外部環境を監視するためのシステム及び方法
この発明のシステムは監視エリア内に含まれる物体を表している外部からの存在情報を捕捉するための補足デバイス(1)を有している。上記情報捕捉デバイス(1)は、電子システム(4)と協働する車両の軌道検出用手段(2)及び車両の傾斜検出用手段(3)といっしょになって動作する。この発明の方法は、提案されているシステムを使用しており、軌道及び/又は傾斜を捕捉デバイス(1)によってカバーされる対応する監視エリアと関係付けるチャートを形成し、使用する捕捉デバイス(1)のタイプに依存する適切な行動を電子システム(4)によって選択し実行することによって、車両の軌道及び/又は傾斜に応じて前記監視エリアを変更する段階を有している。  (もっと読む)
(もっと読む)
位置測定制御方法

【課題】 本発明により、GPS や無線LAN を用いたシステムでは出来なかった、通信機を有しない物体の位置を測定することが可能となり、またカメラを用いたシステムでは困難であった死角や暗所の物体も、電波等の物体を透過して測定可能なセンサを用いる事で測定が可能とすることを目的とする。
【解決手段】 本発明は、複数の該距離測定用センサを制御する制御部とで構成され、該制御部が複数の該距離測定用センサから測定結果を収集する位置測定制御方法において、該制御部が測定開始を指示する制御信号に同じ識別信号を付加して、各々の該センサに同時或いは連続して送信し、各々のセンサは制御部からの該制御信号を受信し、距離測定を開始して、距離測定が終了すると、測定結果に、該制御部で付加されたと同じ識別信号を付加して制御部に返信する位置測定制御方法を用いる。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
船舶位置表示装置
【課題】 船舶から送信される船舶識別信号の送信時間間隔が長くなっても、またはその船舶識別信号の受信不可能な時間が長くなっても、その船舶の位置や状態(針路、船速、停船の有無等の状態)の把握および推定が容易な船舶位置表示装置を構成する。
【解決手段】 船舶から所定時間間隔で送信される船舶識別信号(AISデータ)を受信してその船舶の船舶位置を求め、時間経過に伴う船舶の位置や状態の変化に基づいて、AISデータの受信タイミングとは別のタイミングで船舶の位置を推測し、船舶位置と推測位置とを互いに異なった色・濃度または形態で表示する。
(もっと読む)
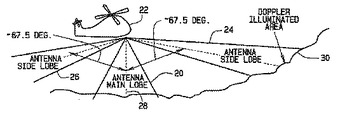
前方測距能力を備えたレーダ高度計
レーダ高度計(50)に前方測距法を持たせる方法が記載される。この方法では、レーダ信号の副ローブ(24)がアンテナから前方に放射されるように高度計のアンテナを配置し、副ローブのレーダエコーを処理して前方対象物(30)までの距離を決定する。
 (もっと読む)
(もっと読む)
41 - 47 / 47
[ Back to top ]