
Fターム[5J070BD06]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光レーダ (26)
Fターム[5J070BD06]に分類される特許
21 - 26 / 26
イベント捕捉およびフィルタリングシステム
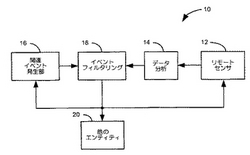
【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
監視装置

【課題】 遠方に存在する船舶や障害などの物体を速やかに自動検知し、かつ、検知した物体の画像を表示すること。
【解決手段】 レーダ1により、物体の存在が検知された場合には、送光部21から発せられるレーザ光がその物体に照射されるように、送光部21及び受光部22の仰角及び回転角が制御装置3により動かされる。これにより、送光部21から発せられたレーザ光は、物体に反射され、この反射光が受光部22により撮像される。そして、受光部22により取得された画像が、レーザレーダ制御部24の画像処理装置により処理され、処理後の画像信号が制御装置3を介して表示装置4に供給される。これにより、表示装置4に受光部22により取得された画像が表示されることにより、その物体の形状などを確認することが可能となる。
(もっと読む)
車両の赤外線撮影表示装置及び赤外線撮影表示方法
【課題】複雑で処理負担の大きな画像処理等を施すことなく安価に、ドライバが車外物体に気づき易い注意喚起効果の高い赤外線撮影画像の表示が行えるようにし、その際、対向車のドライバが幻惑されたり、パッシングと誤認されたりすることがなく、表示範囲が自車前方に限られることもないようにする。
【解決手段】赤外線投光器2a、2bから車外に赤外光を投光し、撮像装置3で撮影した車外の赤外線撮影画像をHUD6に表示する際に、赤外線撮影画像の車外物体の画像部分を物体検出手段52により検出し、この検出に基き、投光調整手段53により赤外線投光器2a、2bの投光状態を調整して赤外線撮影画像の明るさを変化し、安価にドライバが車外物体に気づき易い注意喚起効果の高い赤外線撮影画像の表示を行う。
(もっと読む)
物体検出装置、物体検出方法、物体検出プログラム、距離センサ
観測対象空間に存在する少なくとも1つの物体を検出する物体検出装置であって、検出対象物体の形状を表す画像である物体モデルを算出して記録する物体モデル記録部3と、一度に観測対象空間の全体をカバーするミリ波を照射し、物体候補の距離の算出を行うミリ波距離センサ1と、視点の異なる特徴画像と距離画像を算出するステレオ画像センサ2と、物体候補を選択する制御部7と、物体モデルから照合モデルを算出するモデル変換部4と、特徴画像と距離画像から照合画像を抽出する照合画像抽出部5と、照合モデルと照合画像の類似度を算出し、最大類似度が所定の範囲内となった場合、照合画像の座標と物体候補の距離から前記物体の3次元位置を算出し、前記物体の3次元位置を外部へ出力する類似度照合部6とを備えてなる。 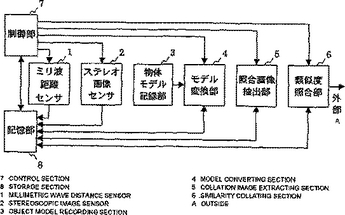 (もっと読む)
(もっと読む)
入退場管理システムにおける共連れ防止方法
【課題】タグ携帯の有無及びそのタグ数の認証と、画像分析による人数カウントとに基づいて正確な入退出者数をカウントするようにしてより高度のセキュリティ管理を行えるようにした入退場管理システムにおける共連れ防止方法を提供すること。
【解決手段】固定側に配置したコントローラCTLと、各種情報などを予め入力したタグT間を光信号及び/又は電波にて送受信した情報と、認証用データベースの情報とに基づいて判定して位置ID及びタグIDを認証し、かつ該認証判定によるカウント数と、カメラによる画像分析の人数カウントとを比較し、その判定結果に基づいてタグ不携帯者の共連れ不正侵入を防止する。
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 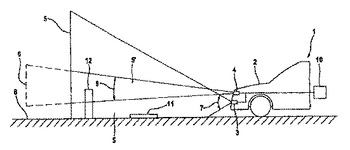 (もっと読む)
(もっと読む)
21 - 26 / 26
[ Back to top ]