
Fターム[5J083EA43]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示方法 (282) | 補助情報表示 (68) | 航跡 (10)
Fターム[5J083EA43]に分類される特許
1 - 10 / 10
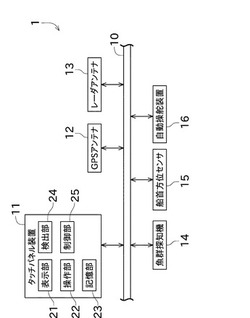
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法

【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
水中探知装置及び水中探知システム
【課題】他船の航跡からの反射信号に関わらず、魚群信号を識別容易に表示する。
【解決手段】スキャニングソナー10は、レーダ装置10から他船の位置の情報を継続して取得する。表示画像処理部134は、この他船の位置情報に所定の加工、すなわち輝点を表す画像信号に変換する処理を施す。変換された輝点画像は、航跡情報に沿って線状となり、探知画像に重畳されて表示部に導かれる。
(もっと読む)
GPS魚群探知装置
【課題】 解決しようとする問題点は、自船15の航跡には何も表示されていないために、通過してきた海域に魚群が存在するかどうかプロッタ上で把握することはできないという点である。
【解決手段】 超音波振動子17に発振器及び受信器を設けた魚群探知機18が接続され、魚群探知機18に魚群探知機制御回路19が接続され、魚群探知機制御回路19に反応検出部20が接続され、アンテナ21を設けたGPS受信器22に位置情報制御回路23が接続され、位置情報制御回路23の出力は表示制御回路24に入力され、表示制御回路24の出力は表示装置25に接続され、反応検出部20の出力は位置情報制御回路23に入力されている。
(もっと読む)
魚群探知機
【課題】必要な魚探画像を効率よく記憶して記憶手段の小容量化を図り、低コスト化を図ることができる魚群探知機を提供する。
【解決手段】イベントマークIM1〜IMnの設定時には、使用者が設定操作した任意の位置での自船位置情報とともに魚探画像表示領域14b相当分の魚探画像A2がメモリに記憶され、それを後の再表示時に表示可能な構成とした。これにより、例えば魚探画像A2に魚影Fが現れた自船位置にて使用者がイベントマークIM1〜IMnの設定操作を行うと、その位置情報のメモリへの記憶とともにその位置付近のみの魚探画像A2がメモリに記憶されるため、記憶される個々の魚探画像A2のデータ量は少なくて済む。
(もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
GPS魚群探知装置
【課題】 従来の魚群探知装置では、自船の周囲に何も表示されていないために、現在の探知エリアをプロッタ上で把握することはできないという問題があった。
【解決手段】表示地図作成部12からの表示地図データは画像用メモリ15で記憶され、超音波振動子16が接続された受信回路17にエコー検出器18が接続され、エコー検出部18に水深検出部19が接続され、水深検出部19は探知範囲直径計算部20に接続され、探知範囲直径計算部20に指向角データ出力部21が接続され、探知範囲直径計算部20の出力は表示円直径計算部22に接続され、表示円直径計算部22に地図縮尺データ出力部14からの地図縮尺データが入力され、表示円直径計算部22の出力は表示円作成部23に入力され、表示円作成部23の出力は画像メモリ15で記憶され、画像用メモリ15の出力は画像表示回路24に入力され、画像表示回路24の出力は画像表示装置25に入力される。
(もっと読む)
魚群探知機および魚群探知機の測定情報表示方法
【課題】過去の反響波情報と自船位置との対応付けが容易な魚群探知機を提供する。
【解決手段】測定情報指定手段26によって指定された時点の反響波情報が、反響波表示用ウインドウ28内の予め規定された基準ライン上に位置するように制御するとともに、測定情報指定手段26によって指定された前記反響波情報を測定した自船位置が、航跡表示用ウインドウ27に表示する航跡画像29において、航跡表示用ウインドウ27内の予め規定された原点に位置するように制御するようにした。
(もっと読む)
魚群探知機
【課題】過去の反響波情報を確認し易い魚群探知機を提供する。
【解決手段】地図上に航跡を表示する航跡表示領域27と、反響波情報を表示画面10の幅方向に沿って時間順に表示する通常反響波表示領域28と、反響波情報を通常反響波表示領域28よりも長い時間範囲に亘って表示する縮小反響波表示領域29とを画像表示器9の表示画面10に同時に表示する特殊分割表示モードに制御可能とするとともに、特殊分割表示モードにおいては、縮小反響波表示領域29に、表示画面10の幅方向に沿って、一定時間間隔の時間目盛42と、該時間目盛42毎に特徴的な指標41とを表示し、さらに、航跡表示領域27の、前記時間目盛42の表示位置と略同時刻の自船位置に、当該時間目盛42と同じ指標40を表示するようにした。
(もっと読む)
コンパクト砲撃体位置特定システムと方法
超音速発射体の砲撃体を位置特定するためのシステムと方法が記載される。砲口爆風信号は、追求も必要もされない。システムは、少なくとも2つのセンサを使用し、各センサは、3軸加速度計を有する。センサは、少なくとも1mの間隔が空けられ、約1センチメートルの直径を有する。各センサの3つの加速度計信号は、圧力勾配を表わし、衝撃波到着角度単位ベクトル、衝撃波到着時刻、およびピーク圧力を見出すために処理される。センサは、衝撃波の高周波特性において最大感度を有し、一方で周囲ノイズの低周波特性に対する感度が比較的低いため、ノイズ信号がこの感知方法で誤検出を生じることはめったにない。  (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]