
Fターム[5J084AD08]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 光の干渉、干渉縞 (103)
Fターム[5J084AD08]に分類される特許
101 - 103 / 103
地形点から3次元整合される地表そのもののデジタル標高モデル抽出
多次元対象についての複数の視野を表す複数のフレームを表している複数の未加工の地形点から、デジタル標高モデルを抽出する方法(300)は:表面上方の妨害物により生成されたデータ点をフィルタリング除去することによって表面を探知し(304)、それにより表面を表す複数の表面データ点を提供し;且つ競争的フィルタを用いて表面データ点をフィルタリングし(306)、それによりデジタル標高モデルのデータ点の多次元表面シェルを提供する;ステップ又は作用を有する。上記方法はまた、専用の情報処理システム、又はプログラム可能な情報処理システム(200)によって実行されることが可能であり、あるいは例えばCD−ROM又はDVD等のコンピュータ可読媒体内の命令セットとして実行されることが可能である。 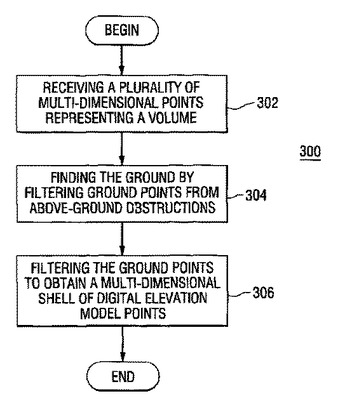 (もっと読む)
(もっと読む)
航空機の上流の乱気流を予測して測定するためのシステム
本発明は、航空機(14)の上流の乱気流を予測して測定し、該航空機に搭載されて配置されたシステムに関し、該システムは;前記航空機(14)の前部に向けて光ビーム(11)を送信し、かつ散乱された光ビーム(12)を受信するためのライダ(10)と、制御手段と関連付けられた直接検出デバイスと、第1内部補正アルゴリズムを使用する第1処理素子と、第2補正アルゴリズムを使用して、少なくとも1つの航空機制御面のアクチュエータに実行可能な命令を送信する第2処理素子と、を含む。 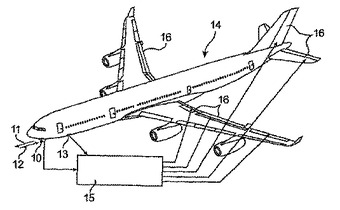 (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
101 - 103 / 103
[ Back to top ]