
Fターム[5J084BA32]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 受光系に関するもの (1,335) | 受光素子の種類に関するもの (797)
Fターム[5J084BA32]の下位に属するFターム
PSD(入射位置検出器) (106)
撮像素子、TVカメラ (227)
光電子増倍管 (15)
フォトダイオード (379)
セル分割型受光素子 (31)
Fターム[5J084BA32]に分類される特許
1 - 20 / 39
距離,速度測定装置
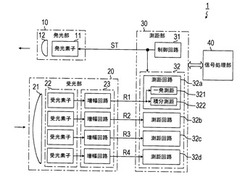
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
画像形成装置

【課題】装置を使用する予定のない人を検知してしまう誤検知を抑制することをより簡易な構成で実現することができる技術を提供する。
【解決手段】記録材に画像を形成する画像形成部と、人が操作するユーザインタフェースと、画像形成部を収納する装置筐体におけるユーザインタフェースを操作する人が位置する側の外面を形成する支持部カバー500と、人を検知する第1の人検知部600と、を備え、第1の人検知部600は、ユーザインタフェースを操作する人が位置すると想定される領域に人が近づいてきたことを検知可能な向きに配置された焦電型センサ610を有し、支持部カバー500は、第1の人検知部600の手前側に配置されて焦電型センサ610の検知範囲の一部を覆うことで、第1の人検知部600の検知範囲A1を水平面に対して斜め下方の範囲に限定する。
(もっと読む)
光波距離計
【課題】電気部品等の温度位相ドリフトや受光部(電気回路)を異にすることで生じる原因不明な位相ドリフトによる測距値誤差を大幅に低減した光波距離計を提供する。
【解決手段】2つの発光素子6,8と、2つの受光素子40,60と受光素子40に接続された第1の受光部300と受光素子60に接続された第2の受光部400と発光素子6,8の発光を切り換える発光切換手段4と第2の受光部400を経た信号を帰還して安定状態で再出力するPLL制御回路100と、を備える。発光素子6,8を択一発光させ、発光素子6,8,受光素子40,60等の温度位相ドリフト及び受光部300,400(電気回路)が異なることによる位相ドリフトを含む信号を故意にPLL制御回路100の整調用信号として用い周波数変換器48,68に入力することで、測距信号と参照信号の位相差をとると、既知の固定位相ドリフトのみが残り、原因不明な位相ドリフトは除去される。
(もっと読む)
追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法
【課題】 測定される距離の測定誤差を容易に低減できる追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法を提供する。
【解決手段】 追尾式レーザ干渉計1は、移動体に取り付けられたレトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22を有する本体2と、追尾用光学部22からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備えるものであって、制御手段3は、レトロリフレクタRに入射する測定光L2とレトロリフレクタRで反射される測定光L2とを平行とするように検出器222で受光される測定光L21の目標位置Q2を設定する目標位置設定部32と、本体2の姿勢を制御し、レトロリフレクタRで反射された測定光L21を目標位置Q2に入射させる姿勢変更部33とを備える。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
集光レンズ及び3次元距離測定装置
【課題】 受光素子に対する十分な受光量を確保すると共に受光素子における受光面積の小型化を図る。
【解決手段】 レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4と、被測定物で反射されたレーザー光を集光する集光レンズ11と、集光レンズによって集光されたレーザー光を受光する受光素子7と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する処理部とを設け、集光レンズを、入射されるレーザー光の光軸に直交する一方向において分割された各画角の範囲のレーザー光をそれぞれ集光して受光素子へ導き画角の分割方向に並んで配置された複数のレンズ23、23、・・・によって構成した。
(もっと読む)
小型マルチスペクトル走査システム
本発明は、主ミラー(1)および副ミラー(2)を備える小型マルチスペクトル走査システムに関連し、これらのミラーは互いに向かい合い、反対方向に同じ角速度で回転されるように適合され、それらの回転軸に対して傾けられる。主ミラーは凹形であり、副ミラーは主ミラーよりも小さく、両ミラーの回転軸は位置合わせされる。この構成により、システムは先行技術のデバイスよりも小型になり、システムが動作周波数に依存することが回避される。 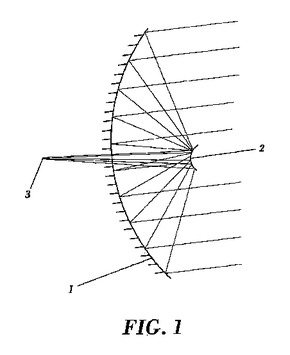 (もっと読む)
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
距離測定装置
【課題】発振器の周波数にゆらぎが生じても、ビートダウンした処理信号間の位相差から距離を測定する。
【解決手段】距離測定装置は、レーザ光束として光周波数コムを発生するレーザ装置1と、基準光27を受光する基準受光部3と、測距光28を受光する測定受光部6とを備える。第1ミキサ31および第2ミキサ32は、測定受光部6および基準受光部3の受光信号と特定の周波数を持つ発振器50の周期信号とを乗算する。第4フィルタ51および第5フィルタ52は、第1ミキサ31および第2ミキサ32で生成された信号成分から異なる周波数成分を抜き出す。第4フィルタ51および第5フィルタ52で抜き出された信号は、第3ミキサで乗算され、差の周波数成分が第6フィルタ54で抜き出される。位相差測定部12は、第6フィルタ54および第2フィルタ11からの2つの処理信号の位相差を測定し、距離測定部17は、その位相差から距離を測定する。
(もっと読む)
レーザーによる測距方法
【課題】
従来のレーザーを用いた距離測定方法は、出射したレーザー光が被測定物で反射して戻って来る迄の時間を計って測距するものである。そのため測距精度はレーザー光の波長には遠く及ばない。また、レーザー光の特徴である可干渉性を利用した測定方法では、距離の変化量は波長程度の誤差で測定できるが、距離は分らない。
【解決手段】
本発明はレーザーの特徴である可干渉性を利用し、測距精度を波長程度、あるいは位相を考慮する事により波長以下にまで高めるものであり、その方法は発振波長の異なる2つ以上のレーザー光を用い、それぞれを参照光と測定光に分け、参照光と測距物から反射して来た測定光を干渉させ、参照光或いは測定光の伝播距離を変化させる事により光路差を変えていくとそれぞれのレーザー光はそれぞれの周期で干渉による明暗をつくるので重ね合わせた明暗の間隔を測ることによって測距物までの距離を知るものである。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
位置計測装置及び位置計測処理方法
【課題】測距精度を向上させるとともに、位置分解能を向上させた位置計測装置及び位置計測方法を提供する。
【解決手段】レーザ光を用いる位置計測装置において、受光感度の異なる光検知器を有する複数の受光回路12〜14を設ける。光検知器の受光視野が互いに一部重なるように、受光回路を配置する。測距回路15〜17において対応する受光回路からの受信信号に基づいて測距値及び受信レベルを求める。制御部18は、測距回路からの受信レベルに基づいて、一の測距値を選択し、また、測距位置を決定する。
(もっと読む)
移動体配置計測システム及び移動体搭載システム
【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
レーザレーダ装置
【課題】装置の小型化を実現することができるようにする。
【解決手段】レーザ光源18によってレーザ光を照射し、照射されたレーザ光が、2焦点レンズ16の中央部分16Aを透過する。2焦点レンズ16の中央部分16Aを透過したレーザ光は、測定領域内の対象物で反射し、反射光が、2焦点レンズ16の周辺部分16Bによって焦点位置に集光される。そして、焦点位置を含む所定領域内に配置された受光素子22によって、反射光が受光される。
(もっと読む)
投影装置及び光測距方法。
【課題】 投影装置から投影面上までの距離を迅速且つ高精度に測距出来る投影装置及び光測距方法を提供する。
【解決手段】 入力された映像データに基づいて映像を投影表示させる映像表示制御部53と、前記映像表示制御部53により映像が投影表示される投影面にレーザーを照射させて、前記投影面までの投影距離を取得する投影距離取得部14と、を備え、前記映像表示制御部53は、前記投影距離取得部14により前記投影距離が取得される際に、少なくとも前記レーザーが照射される領域としてのレーザー測距点63に対応する第一映像領域66の表示状態を、前記投影距離を取得するための表示状態に調整する投影装置。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。フォトゲート電極PG直下の領域は、電界集中領域1Gからなる。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。投光用の近赤外光の入射に応答して半導体深部で発生したキャリアを、光入射面とは逆側のキャリア発生位置近傍に設けられたポテンシャル井戸に引き込めば、高速で正確な測距が可能となる。
(もっと読む)
レーザ測距装置
【課題】投光・受光の過程での光エネルギーの損失が少なく、かつ投受光視差も小さいレーザ測距装置を提供する。
【解決手段】パルス波または変調波からなるレーザ光1を発光する発光素子12と、発光素子に近接して位置しレーザ光2を対象物に向けて投光する投光レンズ14と、対象物で反射したレーザ光3を反射する反射ミラー16と、反射ミラーで反射したレーザ光を受光する受光器18とを備える。発光素子12は、ビーム拡がり角が小さい狭角方向とビーム拡がり角が大きい広角方向とを有している、また、投光レンズ14は、投光レンズ直後でのビーム形状を狭角方向に短く、広角方向に長く成形し、投光レンズ通過後のビームは広角方向ではほぼ平行光に、狭角方向は徐々に拡大するように焦点距離が選定されている。さらに、反射ミラー16は、投光レンズ14から投光されたレーザ光の狭角方向にレーザ光2と干渉しないように近接して位置する。
(もっと読む)
1 - 20 / 39
[ Back to top ]