
Fターム[5J084BB05]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825) | 可動レンズ (75)
Fターム[5J084BB05]に分類される特許
1 - 20 / 75
光走査装置及びレーザレーダ装置
【課題】精度高く正確に走査光の走査量を測定することができるとともに、小型化が可能で、かつ安価な光走査装置、及びレーザレーダ装置を提供する。
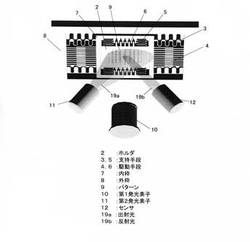
【解決手段】 光学素子1と、ホルダ2と、ホルダ2を移動可能に支持する支持手段3,5と、ホルダ2を光学素子1の光軸に垂直な方向に移動させる駆動手段4,6と、光学素子1を透過する第1の波長の光を発光する第1発光素子10、及び光学素子1を透過しない第2の波長の光を発光する第2発光素子11からなる発光素子を備え、
ホルダ2に、第2の波長の光を透過しない構造体からなるパターン9が形成され、
第2の発光波長を感知するセンサ12をさらに備え、
センサ12は、反射された光を受光可能な位置に配置され、かつ第1発光素子10と、第2発光素子11と、センサ12とが、相対的に固定された位置に配置されていることを特徴とする光走査装置、及びレーザレーダ装置。
(もっと読む)
レーザ距離測定装置

【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
集光レンズ及び3次元距離測定装置
【課題】 受光素子に対する十分な受光量を確保すると共に受光素子における受光面積の小型化を図る。
【解決手段】 レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4と、被測定物で反射されたレーザー光を集光する集光レンズ11と、集光レンズによって集光されたレーザー光を受光する受光素子7と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する処理部とを設け、集光レンズを、入射されるレーザー光の光軸に直交する一方向において分割された各画角の範囲のレーザー光をそれぞれ集光して受光素子へ導き画角の分割方向に並んで配置された複数のレンズ23、23、・・・によって構成した。
(もっと読む)
三次元形状測定装置
【課題】測定領域が狭小の場合のみならず比較的広大の場合であっても、被測定物の三次元形状を測定可能とする三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化する光パルスを生成するパルス光源30及びチャープ導入装置32と、生成された前記光パルスをワーク24の表面26に照射し、前記ワーク24で反射された前記パルス光を所定のタイミングで所定の光量だけ切り出し、前記光パルスの反射光像を取得する反射光像取得部70と、取得された前記反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得するカラー二次元検出器52とを備え、反射光像取得部70は、ワーク24に照射される前記光パルスの照射領域42を拡縮する焦点位置補正部66と、拡縮された照射領域42に応じて前記光パルスを切り出す前記所定の光量を調整するシャッタ動作補正部68とを有する。
(もっと読む)
測距装置
【課題】測距装置の利便性を向上させる。
【解決手段】測距装置11には、送光レンズ22乃至カラーフィルタ25からなる照準望遠光学系が設けられ、ユーザは、カラーフィルタ25から目標物を確認することができる。また、収納部37には、接眼部26に着脱可能な、特性の異なるカラーフィルタ25が複数格納されている。カラーフィルタ25は、各天候に対してまぶしさを軽減させ、かつコントラストを向上させる特性を有しているため、ユーザは、外部環境に適したカラーフィルタ25を接眼部26に装着することができる。このように、測距装置11に対して着脱可能な、互いに特性の異なるカラーフィルタ25を設けることで、測距装置11の利便性を向上させることができる。本発明は、ゴルフ用のレーザ距離計に適用することができる。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
走査制御装置
【課題】永久磁石の長さ以上に走査対象物を走査させることができる走査制御装置を提供する。
【解決手段】永久磁石である磁石103A、磁石103Bの表面から所定間隔空けてコイル102が板ばね17により支持されている。コイル102は、磁石103Aおよび磁石103Bの磁界に対して直交する方向に電流が流れる。コイル102に電流を流すと、フレミングの法則に従って電磁力が発生し、コイル102を走査することができる。ここで、コイル102の一端が、磁石103A、磁石103Bのいずれかの面から外れる場合、電流の供給を停止する。すると、コイル102は慣性による移動を行い、板ばね17の共振周波数で振幅運動が継続する。よって、永久磁石の磁界を超えても走査対象物を走査することができる。
(もっと読む)
対象物検出装置
【課題】レーザ光照射方向に対して走査機構が薄く、かつ水平方向に移動量が大きい対象物検出装置を提供する。
【解決手段】高速に大きく移動することが求められる水平走査機構としてリニアモータ11を用い、水平方向ほどの高速移動性が求められない垂直方向には、垂直走査機構としてステッピングモータ16を用いる。ステッピングモータ16は、2つの板ばね17、受光レンズ14、および投光レンズ15で囲まれた空間に配置される。よって、レーザ光照射方向に対して走査機構が薄く、かつ水平方向に移動量が大きい対象物検出装置を実現することができる。
(もっと読む)
海上監視・捜索方法
【課題】捜索海面における海域の状況を迅速に把握し、対象物を効率良く監視又は捜索することができる海上監視・捜索方法を提供する。
【解決手段】高速で飛行する航空機(固定翼、回転翼)21に搭載したレーザレーダ22から対象物11が存在すると思われる捜索海域10に対して、所定の比率の矩形状のレーザ光23を照射し、捜索海域10における一回に取得する撮像領域(レーザ照射エリア)24の撮像情報を取得し、この撮像上方から捜索海域10の波の情報を取得し、前記取得した捜索海域10の波の情報から、前記レーザレーダの捜索俯角(θ)を決定し、対象物11を捜索する。
(もっと読む)
光波レーダ装置
【課題】本発明は、望遠鏡の交換をすることなく、視線方向への計測可能範囲を比較的広くすることができるとともに、計測作業の円滑化を図ることができる光波レーダ装置を提供する。
【解決手段】第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれを略平行化する。また、第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれのビーム径及び集光距離を調整可能となっている。第1コリメータ光学系106A及び第2コリメータ光学系106Bを経た第1送信光A4及び第2送信光A5は、偏光合成分離手段108によって、互いの直交偏光成分が合成される。直交2偏光の送信光は、送受信同軸の望遠鏡109によって、大気中の所望の目標へ向けて照射される。
(もっと読む)
空中の水滴および氷晶の機内検出のための装置および方法
【課題】照射部および検出部を含む、空中の液体の水滴および氷晶を光学的に検出して区別する装置を提供する。
【解決手段】照射部は、円偏光した照射ビームを出力する。検出部は、照射ビームに応答して、雲の中の水分から円偏光した後方散乱光を受け取る。円偏光した後方散乱光に円偏光器を通過させて、直線偏光した後方散乱光に変換し、これを2つの成分に分割する。任意選択で、2つの成分はそれぞれ、あらゆる漏れ型の直交偏光を除去するためのさらなる直線偏光を受ける。次いで、2つの成分を光学的に検出し、その結果得られる検出信号を使用して、空中の氷晶および/または水滴の有無を反映する1つまたは複数のパラメータを計算する。
(もっと読む)
距離測定装置、距離測定方法及び投影装置
【課題】より迅速に対象までの距離を算出する。
【解決手段】レーザー光源2a、2b、2cからスクリーン100に向かってレーザー光La、Lb、Lcを同時に照射させる(ステップS1)。このように、レーザー光源2a、2b、2cからレーザー光La、Lb、Lcを同時に照射させことから、後述するスクリーン100までの距離やスクリーン100の角度をより迅速に測定することができる。そしてステップS5においては、位相差検出回路5a、5b、5cを動作させて、レーザー光La、Lb、Lcと反射光成分Ra、Rb、Rcとの位相差を検出し、各位相差に基づき、各距離を算出する(ステップS6)。また、これらの距離を用いてスクリーンの角度の角度を算出し(ステップS7)台形補正を実行する(ステップS8)。
(もっと読む)
光スキャン装置
【課題】指示した動きと実際の動きとの差を小さくして高精度な光走査を行うことができる光スキャン装置を提供すること。
【解決手段】レーザダイオードから出射されるレーザ光の方向をレンズが搭載された可動部を移動させることによって変化させる光スキャン装置において、レーザ光の走査を行うための往路の期間801で発生させる加速度の大きさよりも、レンズの位置を戻すための復路の期間802で発生させる加速度の大きさを大きくする。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部12は、処理部22で白線を検出した場合に、当該白線の画像特徴量(彩度、色相)を算出する。さらに、処理部12は、画像全体において、算出した白線の画像特徴量に一致する画像特徴量を有する位置を検出する。そして、レーザレーダ装置2の処理部22で検出した白線の位置における画像とカメラで抽出した遠方の白線の画像とを合成する。
(もっと読む)
光走査用アクチュエータ、光走査型センサおよび物体検出装置
【課題】レイアウトの自由度が高く、かつ良好な駆動効率を実現することができる光走査用アクチュエータ、光走査型センサおよび物体検出装置を提供する。
【解決手段】光を透過、屈折または反射する第1光学素子を保持する第1保持部材と、第1保持部材をベース部材に対して所定の方向へ駆動する第1駆動手段と、ベース部材と第1保持部材とを連結し、第1保持部材をベース部材に対して変位可能に支持する第1支持手段と、第1保持部材よりも第1光学素子が出射する光が進行する側に位置し、第1光学素子が透過、屈折または反射した光を受光し、この受光した光を透過、屈折または反射する第2光学素子を保持する第2保持部材と、第1駆動手段が第1保持部材を駆動する方向と異なる方向へ第2保持部材を駆動する第2駆動手段と、ベース部材と第2保持部材とを連結し、第2保持部材をベース部材に対して変位可能に支持する第2支持手段と、を備える。
(もっと読む)
光スキャン装置
【課題】基本周波数によるゲイン上昇を有効に利用して少ない電流値で大きなアクチュエータの電磁駆動を得ることができ、小型且つ低価格な磁気回路を用いて光走査における光照射の時間の割合を高めた車両用光スキャン装置を提供すること。
【解決手段】ホルダに保持された光学素子の光軸に垂直な方向である第1の方向に上記ホルダを移動させる第1の駆動動作と、上記第1の方向の逆方向に移動させる第2の駆動動作と、を交互に繰り返し行う駆動手段と、上記ホルダの位置を検出する位置検出手段と、を具備し、上記第1の駆動動作に要する時間をT1とし、上記第2の駆動動作に要する時間をT2とし、1/(2×T1)=f1、1/(2×T2)=f2とし、上記ホルダと上記弾性支持手段とから成る系の上記弾性支持手段の基本共振周波数をf0とすると、上記f0、f1、及びf2は、0.6≦f1/f0、f2/f0≦1.4を満たす光学装置。
(もっと読む)
光照射装置
【課題】レーザビームのスキャンパターンを徐々に変更することができ、且つ位置検出素子の精度誤差を補正して正確なアクチュエータの位置制御を行うことができる光照射装置を提供すること。
【解決手段】スキャナ制御部300内のDSP301が有するメモリ301dにスキャンパターンに応じた複数の角度指示値を制御パラメータとして記憶させておく。システム制御部100からスキャンパターンの切り替え指示がなされた場合には、アクチュエータ202の位置指示値が不連続に変化しないようにメモリ301dから角度指示値を読み出して目標角度指示テーブル設定部301eに設定する。また、メモリ301dに記憶させる角度指示値はPSD204aの非線形誤差を打ち消す補正値によって補正しておく。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
物体検出装置
【課題】停止車両を、路面標示や路面に埋め込まれた反射物等の路面設置物と、区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、水平方向、および垂直方向にレーザ光を走査し、自車両前方に存在する物体を検出する。また、制御部2は、検出物体について、(a)停止物体である、(b)自車両からの距離が予め定めた路面設置物判定距離D1よりも短い、(c)前回の下走査で得られた反射波の強度が、前回の上走査で得られた反射波の強度の路面設置物判定係数倍(×α1)よりも大きい、および、(d)前回の下走査で得られた反射波の強度が、今回の基準走査で得られた反射波の強度よりも大きい、という、4つの条件が全て成立したときに、その検出物体を自車両の走行を妨げない路面設置物であると判定する。
(もっと読む)
1 - 20 / 75
[ Back to top ]